


Blog de convidado - Charles Guan se preparando para cima (e para baixo) com Markforged
Este blog foi escrito por Charles Guan, graduado em Engenharia Mecânica do MIT e ex-instrutor de oficina e design do MIT. Ele também é o construtor do robô Overhaul no BattleBots da ABC, que vai ao ar neste verão às quintas-feiras às 20h Leste / 19h Central. Ele trabalha como consultor de engenharia em robótica e transporte e é patrocinado pela Markforged para competir em BattleBots. Confira seu site e Equals Zero Robotics.
Alguns antecedentes de robôs de combate

No mundo da luta de robôs, existem alguns designs básicos que você tende a ver o tempo todo - são suas cunhas, nadadeiras, martelos, rotores giratórios e assim por diante. Como o Pokémon Lendário, alguns designs são “santo grails”, raramente vistos e ainda mais raramente bem executados na arena. O “flipper do volante” é um deles. Normalmente, seus braços lançados em alta velocidade, que são aqueles vistos jogando os oponentes vários metros no ar, são pneumáticos. Mas a pneumática, embora densa em potência, não é densa em energia, e mesmo os melhores flippers conseguem menos de uma dúzia de bons tiros antes de literalmente ficarem sem gás. O inversor elétrico do volante combina a alta densidade de energia das baterias com a alta disponibilidade de energia da energia cinética do volante.
Canalizar essa energia em uma forma rapidamente liberável, mas controlável, tem sido difícil de entender. Os desafios do projeto incluem um mecanismo de engajamento confiável, tempo consistente, aceleração gradual e um vínculo robusto com o fim do negócio. Se bagunçar qualquer um deles, você poderá muito bem ter construído uma granada de energia cinética.
Apenas alguns exemplos em toda a história da luta de robôs foram feitos. No final das contas, há a série de robôs de classe de 3 a 30 lb de Zac O’Donnell, incluindo seu bot Magneato e os designs relativamente bem-sucedidos de Dale Heatherington. Para os grandes bots, Warrior tem sido a referência.

Se você notar, cada um desses bots usa uma abordagem de design e mecanismo final diferentes. Isso ilustra o nível de exploração que o design teve na comunidade; os projetos de robôs tendem a crescer à medida que uma solução ideal local é encontrada pelos construtores, de modo que um projeto de arma com vários meios para o fim é aquele que ainda não foi dominado.
Há alguns anos, eu procurava uma solução compacta e coaxial para o problema que pudesse ser montada em linha com um "volante pontiagudo" - um tambor giratório ou disco com dentes - e conectada a um mecanismo do outro lado do o robô. Isso torna um robô de arma dupla com muitas possibilidades estratégicas. Então, decidi tirar a temporada entre os torneios de BattleBots para levar adiante essa ideia em um pequeno robô de 3 libras, manter minhas habilidades de design afiadas e ajudar a desenvolver outra solução para a comunidade. Por que um robô da classe de 3 libras? Porque é um tamanho fácil com o qual você pode imprimir usando um Mark Two!

Projetando o mecanismo de engrenagem impressa em 3D
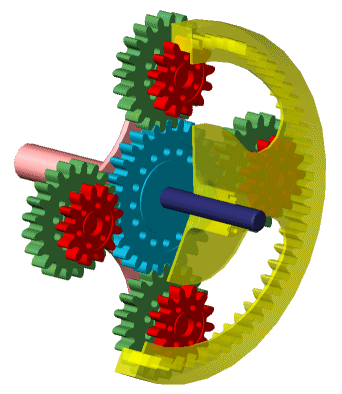
Os requisitos incluem embalar uma relação de engrenagem muito alta (na ordem de 20 ou mais para 1) em um volume coaxial e encontrar uma maneira de engatar essa redução de engrenagem somente quando necessário. Eu investiguei sistemas de engrenagens planetárias conhecidos como trens de engrenagens epicíclicas compostas, lançando vários livros de referência, incluindo o venerável “Manual de Mecanismos e Dispositivos Mecânicos” e vasculhando a Internet em busca de white papers de design. Resumindo, isso permite a criação de relações de engrenagem extremamente altas no mesmo volume de uma caixa de engrenagem planetária simples, aproveitando a velocidade relativa de duas engrenagens de anéis de tamanhos ligeiramente diferentes.
Depois de um curto período projetando embreagens deslizantes e bandas de fricção personalizadas, percebi que estava apenas projetando minha própria transmissão automática. Coisas complicadas geralmente não duram muito em batalha, então eu tive que pensar em outra maneira de usar este sistema de redução de marcha. A solução estava em usar o conjunto de engrenagens como um dispositivo de divisão de torque. Você pode saber isso como "Hybrid Synergy Drive" da Toyota ou sob qualquer número de outros nomes de transmissão infinitamente variáveis de marca registrada. Essa descoberta aconteceu, como muitas na história, por acidente - eu estava girando meu modelo CAD e descobri que ancorar uma coroa fazia a outra ainda girar, e vice-versa. Eu tinha esquecido que “velocidade relativa” significa que uma dessas velocidades pode ser zero.
Empolgado, eu rapidamente modelei uma engrenagem de anel de brinquedo e um conjunto de engrenagem planetária e imprimi-o usando Onyx em um Mark Two. Onyx é o único material em que eu confiei que seria forte e rígido o suficiente. Eu estava limitado em quais tamanhos de dente de engrenagem eu poderia usar devido ao pequeno tamanho do robô; dentes de náilon regulares seriam flexíveis demais. Então, eu queria usar o modelo do brinquedo também para ser um medidor de tolerância para o produto final, caso eu tivesse que fazer pequenas alterações dimensionais. O modelo confirmou minha hipótese de que eu só precisava parar repentinamente uma marcha usando qualquer método - por freio, por embreagem ou simplesmente por meio de uma vara nos raios da roda da bicicleta, e o outro anel é forçado a girar!

Preparado para o combate de robôs
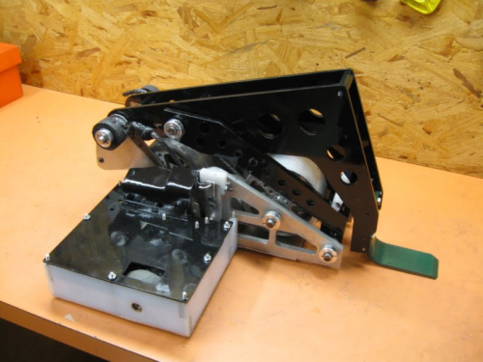
O trabalho no robô então começou para valer. Retirei alguns dos meus esboços de ideação de muito tempo atrás e decidi apenas ir para um modelo CAD de "primeira passagem" para definir o conceito e trabalhar nas necessidades de design individuais a partir daí. Para encurtar a história, aqui está uma foto do design como está agora!
Então, o que está acontecendo aqui? Ele tem um corpo triangular que é invertível - não há "de cabeça para baixo" para falar. O objeto redondo de prata à esquerda é um rotor de alumínio de 8 onças com parafusos de cabeça cilíndrica como "dentes", que é uma tática comum nesta classe de peso pequeno para armas giratórias. O mecanismo planetário é modelado em preto (para Onyx) e um servo motor irá empurrar um dente deslizante na coroa dentada sob comando, forçando-a a parar de girar e a outra coroa dentada a iniciar. Esta engrenagem anelar tem um lóbulo de came deslocado com uma biela para uma “articulação borboleta” que força as asas de metal superior e inferior a se separarem conforme o came gira. As asas de metal articulam-se em um ponto comum, de modo que uma reage contra o solo enquanto a outra levanta o que quer que esteja sobre ela naquele momento.
Há detalhes e problemas geométricos que ainda precisam ser resolvidos antes que este projeto seja concluído, mas agora estou confiante no conceito. Isso tem suas desvantagens - por exemplo, se o dente deslizante ficar preso, o mecanismo estará sempre ligado e o robô poderá perder a mobilidade. Se ela disparar sem peso nas asas, provavelmente irá subir para o telhado. Mas observar as deficiências do seu design se tornarem muito visíveis faz parte da diversão do esporte, então estou ansioso para ver o que acontecerá com este bot!
Aqui está uma demonstração do sistema:
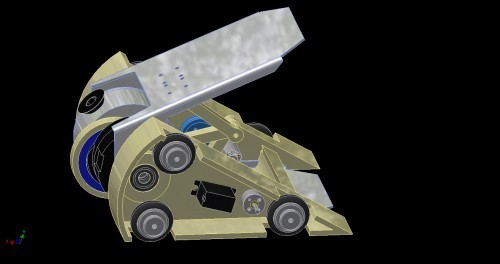
E aqui estão mais algumas fotos do design:


Fotos cortesia de Charles Guan.
MMF # 1:Dobradiças vivas impressas em 3D com Bennett
Parte da semana - Braçadeira de cabo composto da MechEngineerMike
impressao 3D
- Entrevista com um especialista:Ibraheem Khadar de Markforged
- Gabaritos e acessórios:6 maneiras de melhorar a eficiência da produção com impressão 3D
- Construa seu robô de streaming de vídeo controlado pela Internet com Arduino e Raspberry Pi
- Em manutenção. Aumente a confiabilidade.
- Projete e fabrique mais rápido com Formlabs e Fusion 360
- Stratasys faz parceria com GrabCAD e e-Xstream
- Correção do caos com SOLIDWORKS e MakerBot
- Rosto primeiro:proteção de nariz em Kevlar® com Markforged
- Domínios Markforged em Robot Combat
- Pick and place – um exemplo perfeito de uso de robô com EasyWork