


Loops de controle:aberto x fechado
 O circuito de controle de feedback é provavelmente a ferramenta mais inovadora e confiável no campo da engenharia de controle. Loops de controle como um todo são eficientes ferramentas para determinar problemas e questões em um sistema, atingir valores de ponto de ajuste em processos e manter a estabilidade de um sistema. Existem três tipos principais de sistemas de malha de controle:malha fechada, malha aberta e malha aberta e fechada combinada. A malha fechada depende mais do feedback, enquanto a malha aberta não. Combinado usa feedback e feedforward para estabilizar um processo.
O circuito de controle de feedback é provavelmente a ferramenta mais inovadora e confiável no campo da engenharia de controle. Loops de controle como um todo são eficientes ferramentas para determinar problemas e questões em um sistema, atingir valores de ponto de ajuste em processos e manter a estabilidade de um sistema. Existem três tipos principais de sistemas de malha de controle:malha fechada, malha aberta e malha aberta e fechada combinada. A malha fechada depende mais do feedback, enquanto a malha aberta não. Combinado usa feedback e feedforward para estabilizar um processo. O diagrama a seguir ilustra todo o circuito de controle de feedback:
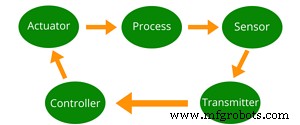
Dividindo isso, temos:
- O processo que deve ser controlado
- Um sensor que mede o parâmetro físico do processo
- Um transmissor que converte as informações sensoriais por meio de sinais eletrônicos
- Um controlador que compara o sinal e o setpoint
- Um atuador que realiza um esforço corretivo em resposta ao sinal enviado pelo controlador
Em um sistema de controle de malha fechada, a sequência é repetida até que o ponto de ajuste seja alcançado. Alguns exemplos comuns são o termostato para a temperatura do forno ou o controle de cruzeiro em um carro. Mas isso não significa que todas as operações automáticas requerem feedback para funcionar corretamente. As configurações de malha aberta, que pressupõem que a sequência é necessária apenas uma vez, podem atender a várias operações sem a necessidade de confirmações constantes via feedback.
Tipos de controle de circuito fechado
Controle de circuito fechado contínuo
Nem todos os processos de malha fechada são iguais. Para um processo de controle contínuo, a malha de realimentação mantém o valor da variável de controle definido pelo usuário, também chamado de setpoint. O controlador realiza uma simples subtração da última medição sensorial do setpoint. A magnitude do resultado determina o esforço corretivo que seria aplicado pelo controlador, através do atuador.
Por exemplo, um carro cujo controle de cruzeiro está ativado usaria o velocímetro como sensor para medir sua velocidade. Se a velocidade for inferior ao valor definido, o controlador acelera o carro alimentando mais combustível. Se o carro estiver viajando muito rápido, a entrada de combustível diminui proporcionalmente. Esse processo de medir-decidir-atuar continua até que a velocidade do carro atinja o ponto de ajuste.
Controle de circuito fechado discreto
Com o controle contínuo de malha fechada, a variável de interesse é medida em todos os momentos, mas com sistemas de controle discreto, um evento de disparo resultaria na sequência medir-decidir-atuar. Por exemplo, os humanos usam seus olhos para determinar o status da luz ambiente do lado de fora antes de dirigir e se devem ou não acender os faróis. Nenhum ajuste adicional é necessário até que um evento desencadeante, como uma ocorrência de cobertura de nuvens pesadas ou o início da próxima viagem.
Os ciclos de feedback discretos são muito mais simples do que os contínuos porque não envolvem monitoramento contínuo ou problemas como overshoots acentuados. Resultados instantâneos são obtidos quando os faróis são ligados em comparação com os resultados graduais com o controle de cruzeiro.
Controle de malha aberta
Como mencionado anteriormente, os controladores de malha aberta assumem que o ponto de ajuste será alcançado de uma só vez e aplicam um único esforço de controle quando ocorre o disparo. Esses controladores também podem ter a opção de medir os resultados. Por exemplo, o motor deu partida ou parou? Essas medições são principalmente para considerações de segurança e não fazem parte da sequência.
Ocasionalmente, um controlador de malha fechada pode operar como um de malha aberta devido a uma falha do sensor ou controle manual por um operador. O operador deve intervir quando um controlador de feedback não puder manter sua estabilidade. Por exemplo, um controlador de pressão forte pode não ser capaz de compensar adequadamente uma queda na pressão da linha, resultando em oscilações e excessos frequentes. Nesses casos, o operador deve assumir o controle manualmente para estabilizar o sistema.
Existem também vários processos para os quais os controles estáveis são muito difíceis de configurar, exigindo que operadores experientes assumam o controle com muita frequência. Os operadores podem usar sua experiência para manipular as entradas do processo e manter o ponto de ajuste desejado muito mais rápido que o controlador. Mas esta não é a situação ideal com o uso de loops de controle. Então, o que aconteceria se os controles de malha aberta e fechada fossem combinados?
Combinando controles de loop aberto e fechado
O controle de malha aberta traz consigo a desvantagem da imprecisão, pois a remoção da parte de feedback também remove a garantia do esforço de controle que faz o esforço de controle necessário. Controles de malha aberta e fechada podem ser combinados para formar uma estratégia de feedforward se a velocidade e a precisão forem necessárias em paralelo.
Um controlador feedforward é construído sobre um modelo matemático do processo para que todos os esforços de controle sejam semelhantes a um engenheiro experiente operando no modo manual. Ele mede os resultados dos esforços de um loop aberto inicial e aplica correções adicionais para eliminar erros e atingir o ponto de ajuste. Esse tipo de controlador é útil quando os sensores certos estão disponíveis para medir uma infinidade de critérios. Se seu efeito futuro puder ser previsto, o controlador poderá tomar medidas preventivas para garantir que o erro seja removido em um tempo mínimo.
Por exemplo, se um carro estiver equipado com radar e controle de cruzeiro, ele poderá ver uma colina subindo e acelerar para compensar a força adicional necessária para subir a colina. Sem o aviso prévio, o controle de cruzeiro nunca saberia que precisa acelerar, levando o circuito fechado a aplicar esforços corretivos até que o ponto de ajuste seja atingido novamente.
Cada tipo de malha de controle tem suas aplicações. O controle de malha aberta é mais adequado para situações em que o ponto de ajuste é alcançável de uma só vez. Os controles de malha fechada são melhores para situações que exigem tentativa e erro para atingir o ponto de ajuste. E o controle combinado de malha aberta e fechada requer modelos matemáticos e, às vezes, sensores para funcionar corretamente. A gama de opções permite que os operadores escolham adequadamente o circuito de controle correto para suas necessidades.
Sistema de controle de automação
- Loops bloqueados por fase
- Circuitos de controle
- Sinal de Neon A Shop Open / Closed no Makerspace no Raspberry Pi 2 (El Paso, TX)
- Abra o Robô CV
- Melhores maneiras de solucionar problemas de automação e loops de controle de processo
- Benefícios da convergência de controle industrial
- Crescimento do mercado de controle de baixa tensão
- Sobrevivendo a um projeto de migração do sistema de controle
- Compreendendo os painéis de controle industrial
- Noções básicas de design do painel de controle