


Outros motores especializados
Motor de indução de polo sombreado
Uma maneira fácil de fornecer torque de partida a um motor monofásico é incorporar uma curva em curto em cada pólo a 30 ° a 60 ° do enrolamento principal. (Figura abaixo) Normalmente, 1/3 do pólo é envolvido por uma tira de cobre.
Essas bobinas de sombreamento produzem um fluxo amortecido com retardo de tempo, espaçado de 30 ° a 60 ° do campo principal. Este fluxo retardado com o componente principal não amortecido produz um campo rotativo com um pequeno torque para iniciar o rotor.
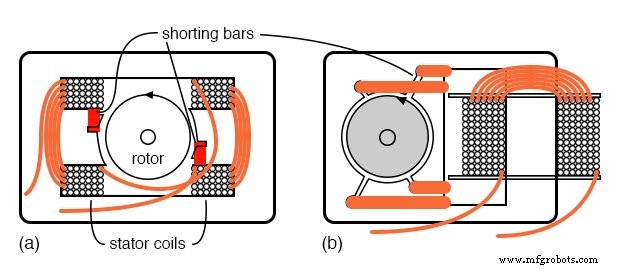
Motor de indução de polo sombreado, (a) design de bobina dupla, (b) versão menor de bobina única
O torque de partida é tão baixo que os motores de pólo sombreado são fabricados apenas em tamanhos menores, abaixo de 50 watts. O baixo custo e a simplicidade adaptam-se a pequenos ventiladores, circuladores de ar e outras aplicações de baixo torque. A velocidade do motor pode ser reduzida trocando a reatância em série para limitar a corrente e o torque, ou trocando as derivações da bobina do motor.
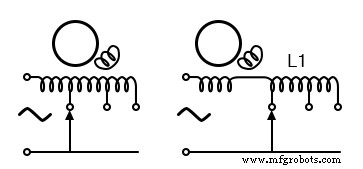
Controle de velocidade do motor de polo sombreado
Servo motor bifásico
Um servo motor normalmente faz parte de um ciclo de feedback contendo componentes eletrônicos, mecânicos e elétricos. O servo loop é um meio de controlar o movimento de um objeto por meio do motor. Um requisito de muitos desses sistemas é uma resposta rápida.
Para reduzir o roubo da aceleração inercial, o núcleo de ferro é removido do rotor deixando apenas um copo de alumínio montado no eixo para girar. O núcleo de ferro é reinserido dentro do copo como um componente estático (não rotativo) para completar o circuito magnético.
Caso contrário, a construção é típica de um motor bifásico. O rotor de baixa massa pode acelerar mais rapidamente do que um rotor de gaiola de esquilo.

Servo motor CA 2-φ de alta aceleração
Uma fase é conectada à linha monofásica; o outro é acionado por um amplificador. Um dos enrolamentos é acionado por um 90 ° forma de onda com deslocamento de fase. Na figura acima, isso é realizado por um capacitor em série no enrolamento da linha de alimentação.
O outro enrolamento é acionado por uma onda senoidal de amplitude variável para controlar a velocidade do motor. A fase da forma de onda pode inverter (180 ° mudança de fase) para inverter a direção do motor. Esta onda senoidal variável é a saída de um amplificador de erro.
Consulte a seção Sincronizar CT por exemplo. As superfícies de controle da aeronave podem ser posicionadas por servo motores 2-φ de 400 Hz.
Motor de histerese
Se a baixa histerese do rotor laminado de aço Si de um motor de indução for substituída por um cilindro sem fenda sem enrolamento de aço magnético endurecido, a histerese ou o atraso da magnetização do rotor é muito acentuado.
O motor síncrono de baixo torque resultante desenvolve torque constante desde o estol até a velocidade síncrona. Por causa do baixo torque, o motor de histerese está disponível apenas em tamanhos muito pequenos e só é usado para aplicações de velocidade constante como acionadores de relógio e, anteriormente, toca-discos de fonógrafo.
Embreagem por corrente parasita
Se o estator de um motor de indução ou um motor síncrono for montado para girar independentemente do rotor, o resultado é uma embreagem de corrente parasita. As bobinas são excitadas com DC e presas à carga mecânica.
O rotor em gaiola de esquilo é conectado ao motor de acionamento. O motor de acionamento é iniciado sem excitação CC para a embreagem. A excitação DC é ajustada de zero ao valor final desejado, fornecendo um torque variável contínua e suavemente.
A operação da embreagem de corrente parasita é semelhante a um velocímetro automotivo de corrente parasita analógico.
Resumo:Outros motores especializados
- O motor de indução de polo sombreado , usado em aplicações de baixo torque com menos de 50 watts, desenvolve uma segunda fase de espiras em curto no estator.
- Motores de histerese são um pequeno motor síncrono de baixo torque, usado em relógios e fonógrafos.
- A embreagem por correntes parasitas fornece um torque ajustável.
Tecnologia industrial
- Motores de indução monofásicos
- Motores do comutador CA
- Projetando controles de motor para sistemas robóticos
- Dica técnica:Motores
- Motores elétricos superdimensionados:eles devem ser substituídos?
- Segurança do motor elétrico:diferentes fases e medidas de segurança
- 4 principais tipos de falhas de enrolamento em motores elétricos CA
- Sobre motores industriais e aplicações
- Uma introdução ao motor BLDC
- 5 razões pelas quais os motores TEFC falham