


Controle o robô sem fio através de comandos Bluetooth Relatório de tese | Projeto DIY
Um robô é definido como um projeto mecânico que é capaz de realizar tarefas humanas ou se comportar de maneira humana. Construir um robô requer experiência e programação complexa. Trata-se de construir sistemas e montar motores, sensores de sonar e fios, entre outros componentes importantes | Projeto Final de Ano para os Estudantes de Eletrônica e Comunicação eng | Engenharia elétrica.
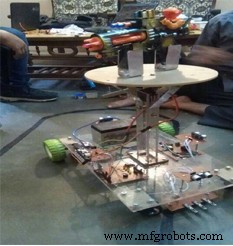 Este artigo abrange o projeto e a construção de um robô capaz de detectar o inimigo. Este robô implementa os seguintes conceitos:sensoriamento ambiental, controle motor proporcional. Este robô processa informações de seus vários sensores e elementos-chave de hardware por meio de um microcontrolador (Arduino mega). Ele usa sensores de sonar para detectar o acidente de incêndio. Um robô capaz de detectar o inimigo e atirar nele. Sensores de sonar serão usados para detecção inicial. Assim que o inimigo for detectado, o robô ligará automaticamente sua campainha em segundos, o robô será ativado e começará a disparar em direção ao inimigo. O projeto ajuda a gerar interesses e inovações nos campos da robótica, ao mesmo tempo em que trabalha para uma solução prática e alcançável para salvar vidas e mitigar o risco de danos materiais.
Este artigo abrange o projeto e a construção de um robô capaz de detectar o inimigo. Este robô implementa os seguintes conceitos:sensoriamento ambiental, controle motor proporcional. Este robô processa informações de seus vários sensores e elementos-chave de hardware por meio de um microcontrolador (Arduino mega). Ele usa sensores de sonar para detectar o acidente de incêndio. Um robô capaz de detectar o inimigo e atirar nele. Sensores de sonar serão usados para detecção inicial. Assim que o inimigo for detectado, o robô ligará automaticamente sua campainha em segundos, o robô será ativado e começará a disparar em direção ao inimigo. O projeto ajuda a gerar interesses e inovações nos campos da robótica, ao mesmo tempo em que trabalha para uma solução prática e alcançável para salvar vidas e mitigar o risco de danos materiais. 1.1 Visão geral
O projeto compreende uma hierarquia controlada sem fio do robô, uma vez que é controlada através dos comandos do dispositivo Bluetooth que controla o movimento do robô. O robô é totalmente remoto e fornece uma visão completa da área que deve ser controlada.1,2 Metas e objetivos:
O principal objetivo do projeto é dar segurança à área que não pode ser controlada pelas forças armadas. Assim, este robô pode entrar nesses locais devido ao seu tamanho e facilidade de controle.Objetivos: • Fornecer um aplicativo de monitoramento e controle remoto para análise. • Permitir que o usuário manipule o inimigo usando o braço robótico. • Fornecer feedback visual para o local sob segurança. • Para fornecer um aplicativo de controle muito fácil de usar. 1.3 Declaração de escopo do sistema :O Robô usa um aplicativo de controle, no lado do usuário para controlar o robô remotamente usando a tecnologia sem fio. A entrada do usuário é transmitida serialmente por um dispositivo Bluetooth para o Robô, onde é recebida, identificada e retransmitida para o módulo apropriado.· A entrada para o sistema é do usuário para o movimento do robô. · Esta entrada é processada primeiro pelo aplicativo de controle, transmitida em série por um Link Bluetooth. Esta entrada é então recebida no robô e processada novamente. · A saída do sistema é o sinal processado para o módulo apropriado. Este módulo pode ser um motor da base do robô.
Principais entradas e saídas:
· Sinais de entrada · Movimento do Braço Robótico · Movimento do robô. Nós o projetamos como um robô assistente da equipe de segurança, mas existem várias outras aplicações deste robô. Pode ser usado por: • Policiais:Em situação de reféns • Militares:Para missões de reconhecimento • Bases Aéreas:Serão utilizadas para manuseio de materiais perigosos ou radioativos.1.4 Bases teóricas e organização
A tese é composta por cinco capítulos. Uma breve explicação é apresentada aqui: Capítulo 1:IntroduçãoEste capítulo discute a questão relativa ao pano de fundo dos objetivos da tese e da estrutura de pesquisa
. Capítulo 2:Revisão da Literatura Este capítulo discute principalmente o dispositivo Bluetooth. Parte da literatura referente a este tópico de tese também está incluída neste capítulo. Capítulo 3:Ferramentas e técnicas Este capítulo discute todas as ferramentas e softwares usados para a elaboração do projeto Capítulo 4:Metodologias O capítulo 4 se concentrará principalmente no procedimento, método e implementação da teoria Através do projeto de simulação do robô detector de inimigos proposto relacionado ao tópico da tese. Capítulo 5:Resultado e Análise
O robô é praticamente testado e verificado. Os testes incluem a eficiência do projeto do sistema de detecção do robô e seu desempenho.
Capítulo 6:Conclusão Por fim, é apresentada uma conclusão sobre os resultados obtidos. Isso também inclui as novidades dentro do trabalho e sugestões para trabalhos futuros.
Esperamos que este artigo ajude os estudantes universitários que estão fazendo bacharelado ou mestrado em eletrônica e comunicação eng .Entre em contato conosco para obter o relatório de tese completo
Como a tela sensível ao toque funciona é mágica ou eletrônica
Como a tecnologia mudou a fabricação de robôs
Tecnologia industrial
- O Futuro da Robótica
- Robô Raspberry Pi controlado por Bluetooth
- Como tornar a integração do seu primeiro robô um sucesso
- Controle de eletrodomésticos pela web ou celular
- Arduino com Bluetooth para controlar um LED!
- Braço do robô controlado por Ethernet
- Robô seguidor de linha de controle PID
- Robô de prevenção de obstáculos controlado por Bluetooth
- Sobrevivendo a um projeto de migração do sistema de controle
- Controle PID da Garra do Robô em Matlab / Simulink