


O Futuro da Robótica
O futuro da robótica é distribuído. Qualquer robô complexo é um conjunto distribuído de módulos e sistemas, alguns autônomos, alguns semiautônomos e alguns controlados por humanos, todos operando em conjunto para formar um único sistema coeso de partes interoperáveis. Na telerobótica, buscamos possibilitar a teleoperação de um robô e dar ao operador uma sensação humana de estar onde o robô está sendo implantado, fornecendo vídeo e forças de interação de volta aos operadores humanos.
Para a ESA, isso significa no espaço ou na superfície de um planeta hostil. O operador humano pode estar em uma estação espacial ou mesmo de volta à Terra!
Para fazer isso, habilitamos a telepresença por meio de uma combinação de feedback de força tátil para o operador combinada com vídeo de realidade aumentada.
Fornecer feedback visual e tátil ao usuário permite a telepresença. Quanto mais realista e informativo for o feedback, maior será a percepção de telepresença do operador, o que leva a uma melhor operação remota do robô.
O desafio crítico para a ESA da teleoperação espacial é o elo de comunicação. Existem muitos loops de controle em tempo real em robôs, mas aquele entre o humano e o robô remoto em um sistema de teleoperação é o mais problemático. Vários loops de controle são executados em um link de rede comutada por pacotes que exibe os piores comportamentos de comunicação. Ele pode se desconectar a qualquer momento, a latência geralmente pode ser medida em segundos e variar muito, além disso, a perda de pacotes é uma ocorrência regular; isso é tão verdadeiro para a comunicação através da Internet quanto através do espaço. Ainda assim, temos que enviar todo o vídeo por este link, tempo correlacionado com o status de controle do robô e comandos de controle em ambas as extremidades. Isso significa que o status do link deve se tornar uma parte integrante do loop de controle, com informações suficientes disponíveis em ambas as extremidades para que o operador reaja apropriadamente e para que o robô remoto se mantenha em um estado seguro e estável. O estado do link deve se tornar uma parte integrante do estado do sistema.
A equipe de desenvolvimento da ESA é composta por engenheiros mecatrônicos, especialistas em visão computacional, teóricos de sistemas de controle e alguns engenheiros de software. Ficou claro para nós em um estágio inicial que precisávamos buscar um método comum para discutir as necessidades e interfaces do sistema, especialmente quando solicitados a entregar sistemas distribuídos complexos envolvendo vários computadores, com várias plataformas de hardware e software para operar; nós decidimos nos dados. Pensamos nos dados como um meio de entender o estado do sistema, como um meio de representar quadros de vídeo e como meio de representar a teoria de controle. Portanto, fazia sentido abordar o nosso ambiente de desenvolvimento e o desenvolvimento do sistema de forma centralizada. Juntamente com a necessidade crítica de entender o status do link como parte da teleoperação, fomos inexoravelmente levados a avaliar o DDS (Serviço de Distribuição de Dados). A NASA já era um usuário pesado de DDS em seus sistemas de comunicação espacial - mas poderia o DDS também permitir a teleoperação em um link tão difícil, permitindo o controle em tempo real sobre o que é de fato a mais desafiadora das conexões? Este é um novo território científico inexplorado, e ainda mais emocionante por causa disso. As indicações iniciais são extremamente encorajadoras.
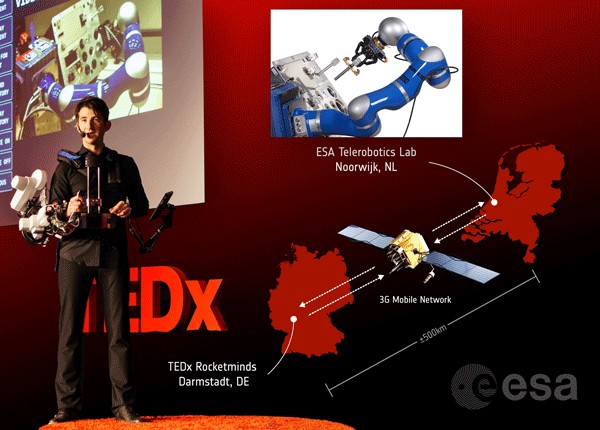
Nesta demonstração ao vivo no TEDx RheinMain RocketMinds, maio de 2014, usei nosso protótipo de braço de exo-esqueleto EXO-1 para controlar remotamente um braço de robô que estava fisicamente localizado em nossa ESA Telerobotics E Laboratório de Haptics a mais de 500 km de distância. Minha tarefa era pegar um pino de metal e colocá-lo em um orifício com uma tolerância de espaço de menos de 0,5 mm. A demonstração inteira foi executada em uma conexão WAN de telefone 2G baseada na Internet porque a conexão 3G planejada estava inesperadamente indisponível! Na sala fechada, lotada de pessoas com telefones nos bolsos, a largura de banda era severamente limitada e, de fato, exibia o tipo de conexão experimentada no espaço - ou, na verdade, muito pior. Não pode ficar pior do que isso, teleoperar sobre um link que exibiu atrasos na faixa de 15 segundos com perda de dados significativa. Ainda assim, o DDS executado no link 2G conseguiu lidar com toda a comunicação para o feedback tátil, o loop de controle do braço do robô e o vídeo do braço do robô no laboratório (transmitido para um tablet no meu braço e clonado localmente para exibição no tela principal do TEDx).
Pode não estar no espaço ainda, mas o controle telerobótico de precisão sobre grandes distâncias e datalinks desafiadores com visão e feedback tátil estão literalmente ao nosso alcance e demonstramos isso para um amplo público .
ATUALIZAÇÃO :O Experimento Haptics-1 foi conduzido a bordo da Estação Espacial Internacional pelo astronauta da NASA Barry Wilmore. Um primeiro pré-teste foi realizado em 30.12.2014. Haptics-1 é o primeiro experimento de feedback de força robótico no espaço. Parabéns! consulte Mais informação
O feedback #haptic é usado pela primeira vez no espaço, sempre! Hoje @ Space_Station # haptics-1 está sendo conduzido com sucesso! pic.twitter.com/30zD5GzGqs
- ESATelerobotics (@ESATelerobotics) 30 de dezembro de 2014
Se você tiver uma história sobre o uso do Connext DDS que gostaria de compartilhar, envie-nos um e-mail para blogadmin@rti.com.
Tecnologia da Internet das Coisas
- O futuro da TV ao vivo
- O Futuro é… Indústria 4.0
- O futuro é… Colaboração
- Computação de borda:A arquitetura do futuro
- Visualizando o futuro da manutenção da planta
- Robótica e o futuro da produção e do trabalho
- O futuro dos data centers
- O Futuro da Tecnologia de Logística:Um Século Chinês?
- A história da robótica na fabricação
- AutoStore:pavimentando o futuro do armazenamento autônomo