


Como a tecnologia mudou a fabricação de robôs
Introdução:aviso que isso pode fazer você se sentir VELHO
Meu nome é Steve Spano, meu primeiro projeto de eletrônica foi conectar uma bateria, dois fios e uma lâmpada quando eu tinha 4 anos. Dos 6 aos 16 anos, aprendi várias linguagens de programação (assembly, basic e até C) em computadores como Texas Instruments TI-994A, Commodore C64, Amiga 2000 e IBM 386. Também construí vários Heathkit projetos eletrônicos como o kit receptor de rádio “Solid State”. Quantos de vocês já ouviram falar do Heathkit?

Eu realmente queria o Robô Heathkit HERO 1, ele era incrivelmente sofisticado com sua detecção de objetos por ultrassom, braço móvel e unidade central de processamento de 8 bits. Ele ainda veio com um teclado remoto de rádio para que você pudesse programá-lo diretamente em Montagem Hexadecimal! Você poderia imaginar? Programando diretamente em hexadecimal com um teclado e sem depurador? O horror! Surpreendentemente, este pequeno robô ainda é vendido por US$ 1.500 no Ebay. Eu deveria comprar um – sempre quis um – e é tão fofo!

Por muitos anos, antes da Internet, se você pode imaginar um tempo assim, eu até executei um serviço “BBS” em um modem de 9600 bauds chamado “Inter-Dimension” onde trocávamos mensagens e soŌware Commodore/Amiga. Meu sonho de computador na época era economizar $ 2.000 dólares (uma quantia fantasticamente enorme de dinheiro em 1995 para um garoto de 16 anos) para comprar um disco rígido de 10 Megabytes para o meu Amiga 2000. Se eu pudesse ter esse disco rígido, Eu teria o melhor BBS baseado em modem!
Cresci em Scranton, Pensilvânia (Estados Unidos) e fiz faculdade de Engenharia Elétrica (Universidade de Scranton) e fiz mestrado em EE com concentração em sistemas de controle pela State University of New York. Meu primeiro trabalho de EE depois da escola foi projetar hardware para impressoras térmicas usadas em caixas registradoras e aplicações de varejo. O principal projeto no meu primeiro trabalho de EE, em 1998, foi ajudar a atualizar os produtos da empresa de sua CPU Intel de 8 bits para um novo processador de 50 MHz de 32 bits com um barramento de memória de 16 bits. Foi um grande projeto envolvendo equipes de software, hardware e engenharia mecânica. Meu segundo emprego em EE foi trabalhar para uma empresa que projetava sistemas de rede de área de armazenamento. Isso foi em 2001 e o grande projeto para esta empresa era ajudar a projetar uma série de sistemas SAN que suportassem a nova interface Fibre Channel de 2 Gbit/s. Isso foi muito rápido, 2Gbit/s em fibra óptica em 2001! Como a tecnologia poderia ficar melhor do que isso??
Projeto Sênior 1997
Descobri sobre a página ElectronicsLovers no Instagram e os administradores procuravam artigos do “Projeto Sênior” para destacar em sua página. Nenhuma data foi especificada, então pensei em enviar meu trabalho do último ano da faculdade de 1997, principalmente como um lembrete divertido de como a tecnologia mudou.
Quando eu estava terminando meu BSEE em 1997 na Universidade de Scranton, nosso projeto de último ano foi projetar um robô autônomo que pudesse navegar por um labirinto. Imediatamente pensei no Heathkit HERO1; agora eu poderia tentar construir um na escola e um robô muito mais avançado. Afinal, o Heathkit HERO1 foi baseado em apenas uma CPU Motorola 6808 de 8 bits com 4 KB de RAM (barra lateral:as placas de rede PCI-Express 1G típicas de hoje têm um buffer de 64 KB a 256 KB apenas para dados de pacote).
A arquitetura de design do meu robô usava um Intel 87x196KC muito mais avançado. Esta era uma CPU de 16 bits que forneceu 32 KB de memória EEPROM interna para armazenamento de programas, mas forneceu apenas uma memória RAM total de 512 bytes. O compilador “C” gerou um código muito pouco otimizado, o que tornou o gerenciamento da pilha em 512 bytes um desafio significativo, e não havia depurador JTAG em tempo real ou qualquer outro tipo de depurador. No entanto, a CPU tinha um serial/UART interno que você poderia usar para escrever saídas de caracteres simples para determinar o que o código estava fazendo. As chamadas de função “C” padrão para printf/sprintf nem eram suportadas na CPU porque a memória RAM era muito pequena.
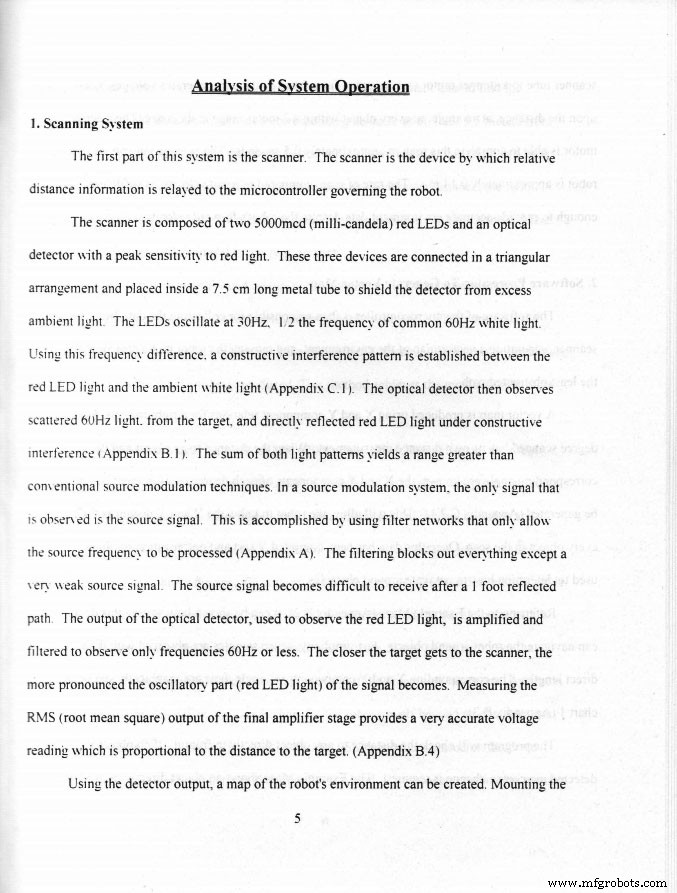
No desenvolvimento do robô, vários circuitos, como drivers FET de controle de motor, foram usados para permitir o controle da CPU sobre uma série de motores de 12 VCC para que o robô pudesse se mover em uma sala. Um sistema “Lidar” bruto foi construído usando um LED de laser, espelho e detector. Isso permitiu que uma visão simples de “1 bit” da sala à frente do robô fosse fotografada. Eu também uso o termo “imagem” muito vagamente. Um mapa simples de “ligar/desligar” para obstáculos foi criado em cerca de 32 bytes de memória. O código da CPU então tentaria determinar se o robô estava se movendo em direção a uma lacuna ou parede no labirinto pelo qual estava tentando navegar. Durante a competição, o robô conseguiu navegar pelo labirinto com sucesso. Eu até escrevi um artigo sobre o design do robô e ele ganhou o 2º lugar no IEEE Student Paper Competition em 1997 na George Washington University. O robô funcionou e eles me deixaram me formar em Engenharia Elétrica.
Projetos do último ano de 2018
Estive recentemente na Universidade de Scranton como consultor da indústria para ajudar a fornecer ideias para os cursos com base no que a indústria pode precisar e quais habilidades/tecnologias são relevantes para os desafios de engenharia atuais. Perguntei a um dos meus professores sobre os projetos de robôs e o que os alunos estão fazendo agora.
A Universidade de Scranton ainda realiza anualmente uma competição de robôs para seus alunos de Engenharia, mas agora é uma competição regional e nacional. Os robôs que os alunos estão projetando são centenas de vezes mais complexos. Os robôs atuais usam CPUs Arm9/Arm11, como o Raspberry PI. Os alunos estão escrevendo código “C” que roda em Linux para fazer interface diretamente com câmeras USB-HD, permitindo a imaginação real nos robôs. Combinando Linux, Raspberry PI e a riqueza de projetos Open Source disponíveis através do GIT e Google, os alunos têm acesso a algoritmos de detecção e reconhecimento de imagens. Durante o desenvolvimento dos projetos de robôs atuais, os alunos podem baixar algoritmos de código aberto, depurá-los com monitores ethernet remotos, permitindo que eles vejam todas as variáveis e depurem seu código em uma única etapa. Os alunos passam mais tempo desenvolvendo algoritmos de navegação muito inteligentes para tentar dar ao seu robô uma vantagem melhor durante a competição.
Depois de ouvir isso, eu imediatamente respondi “Que injusto!”. Na minha época, tínhamos que armazenar uma imagem inteira em 32 bytes e codificar manualmente um gerenciador de pilha para permitir que nosso código fosse executado nos meros 512 bytes de RAM fornecidos. É claro que o Raspberry PI nem é o "pico" da tecnologia atual - mas está anos-luz além de qualquer coisa disponível em 1997. Não apenas o hardware é mais sofisticado, mas os ambientes de depuração e desenvolvimento permitem que os alunos se concentrem no design em vez de lutar com problemas de memória. No entanto, algumas coisas permanecem as mesmas. O robô ainda precisa se mover. Embora os alunos tenham acesso a algumas CPUs de ponta, eles ainda precisam obter uma porta de 3,3 V em um processo para ligar/desligar um motor de 12 VCC. Isso traz os alunos de volta ao projeto de circuito para transistores e FETs, eles aprendem como esses componentes básicos funcionam e permitem que seus robôs se movam.
Eu sorri e disse que o básico ainda se aplica, e os alunos reconhecem isso. Eletrônicos sofisticados ainda dependem da operação fundamental de transistores únicos; talvez um do lado de fora de uma CPU ligue um motor, ou 5 trilhões deles no interior de uma CPU para processar uma imagem e um código de navegação.
http://news.scranton.edu/articles/2017/ 03/FIRST-Robot-Comp-2017.shtml
Então, o que vem a seguir?
Meu 3º “Job” – que tenho até hoje – é administrar meu próprio negócio de Consultoria em Eletrônica e Software. Comecei um negócio de consultoria em 2001 e definitivamente tem sido cheio de trabalho e atividades inesperadas. Empreguei diretamente mais de uma dúzia de pessoas e trabalhamos em projetos de hardware e software que vão desde design de fonte de alimentação, driver de impressora, processamento de imagem, dispositivos de rede, unidades de disco rígido e criptografia. item de tecnologia – FPGAs Xilinx.
Dispositivos FPGA modernos, como a série Kintex/Atrix, reúnem as melhores partes do desenvolvimento de hardware e software; hardware reconfigurável, software reconfigurável e depuração simultânea. Um projeto em particular no qual tenho trabalhado é para um espectrômetro de massa. Nesse projeto em particular, havia muitas restrições para velocidade e coleta de dados. Uma parte da correção foi “basta adicionar outro núcleo de processador”. Quase como mágica, um dispositivo de núcleo único por causa de um dispositivo de núcleo duplo que permite o particionamento de tarefas domésticas e funções críticas. A capacidade de reconfigurar um dispositivo físico, como um FPGA, com núcleos de processador adicionais teria sido difícil de conceber em 1997. Os dispositivos FPGA modernos permitem que você faça isso o tempo todo agora.
Planejo voltar à Universidade de Scranton ainda este ano para conversar com alguns dos alunos sobre os projetos atuais do FPGA. Vou me concentrar mais neles no meu trabalho; talvez no futuro, eu possa orientar novos engenheiros quando eles começarem o primeiro trabalho de sua nova carreira. P.S. Uma “pontuação” é de 20 anos. Eu tive que olhar isso de volta novamente. Sou engenheiro, não major inglês.
Apêndice A – Trechos do My Robot Paper ou
Este artigo foi escrito pelo Sr. Spano, ele faz parte de nossa equipe gentilmente Clique aqui se você quiser ler a biografia dele.
“How Times Have Changed”
Tecnologia industrial
- Como o vanádio foi descoberto?
- Como proteger a tecnologia em nuvem?
- Como fazer uma plataforma de robô Arduino + Raspberry Pi
- Como a tecnologia moderna transformou os métodos de escultura de ovos de Páscoa?
- Robô ‘Artístico’ na NPE
- 9 Leis da Tecnologia que Mudaram o Mundo
- Como as máquinas CNC mudaram de fabricação
- Como os fornecedores de logística devem investir em tecnologia
- Como um roteador CNC mudou nossas vidas?
- Michael Loggins