


Walbi, o Bípede Caminhante
Componentes e suprimentos
 |
| × | 1 | |||
| × | 10 | ||||
| × | 1 |
Ferramentas e máquinas necessárias
 |
|
Aplicativos e serviços online
 |
|
Sobre este projeto
Não seria ótimo se pudéssemos fazer um robô bípede com alguns servos? O Inner Geek achava que sim e este é o resultado ...
Esse é Walbi, o WALink BIped, um robô que criamos para um projeto de aprendizado de máquina que nunca saiu do chão (nem Walbi, mas isso porque tem os dois pés firmemente plantados no chão).
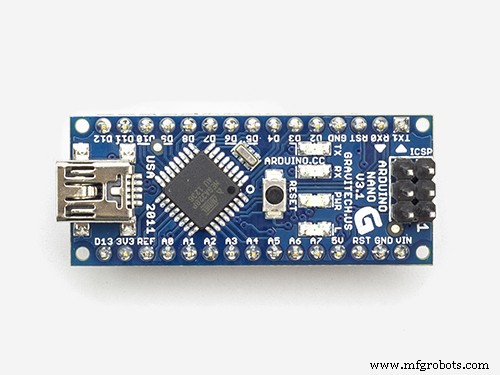
Walbi usa um Arduino Nano para "cérebro", servos LX-16A para "músculos" e peças de plástico impressas em 3D para "ossos". Os servos LewanSoul LX-16A são servos dos sonhos para pequenos (ish) projetos robóticos, pois são leves, podem se mover mais de 19 kg.cm e são conectados com um único cabo, passando de servo a servo, tornando o cabeamento do robô infantil Toque.
Walbi é um humanóide de escala 2:1 e suas pernas têm 55 cm de altura (21,7 pol.) Do calcanhar à cintura e pesam 1,1 kg (2,4 lbs). As partes brancas de seu corpo foram impressas em 3D, mas poderiam facilmente ter sido feitas de madeira leve e resistente.
A programação do Walbi é muito simples. Você pode baixar abaixo os dois programas necessários para fazer captura e playback de movimentos, e com eles você poderá fazer o Walbi andar, engatinhar, escalar, pular ou dançar! Você só precisa mover suas pernas para a pose desejada, gravar essa pose, moldar o Walbi em outra pose, gravar e assim por diante, e então, quando você tiver gravado a sequência completa, pode sentar-se para trás e vê-la executar habilmente o movimentos que você ensinou.
Talvez você possa ensinar a sua dança do rio 😀
Construindo o Walbi
Walbi foi impresso em 3D em plástico PLA, usando uma impressora FlashForge Creator Pro. Você pode baixar os arquivos STL do Thingiverse ou usar um método alternativo para construir os pés, “ossos” da perna e cintura, usando madeira ou metal. Os suportes do servo são fixados a essas partes, aos servos e um ao outro.
Você precisará de suportes metálicos dos quatro diferentes tipos disponíveis para fixar os servos nas peças impressas e entre si (mais informações e fotos disponíveis no blog Release The Inner Gook).
Fiação
Para controlar os servos LX-16A, você precisa de uma placa de depuração LewanSoul.
Ele receberá comandos de uma porta serial no Arduino Nano. Como usamos o hardware serial do Arduino para nos comunicarmos com o computador, usamos a biblioteca SoftwareSerial para criar uma segunda porta serial no Nano, a fim de conectar ao Debug Board.
A fiação é minimizada com servos seriais. Há um cabo de cada servo para o próximo (cabo serial fornecido com os servos) e os servos no plugue da cintura diretamente na placa de depuração. Seu computador se conecta à porta USB do Arduino e o Arduino é conectado à Placa de depuração usando três fios de jumper (TX, RX e GND) conectados aos pinos do Arduino que você configurou para SoftwareSerial - usamos os pinos 10 e 1 no code1 .
Os servos usam uma taxa de transmissão de 115200 (se você souber como alterá-la, diga-nos, pois é muito alta). Essa taxa de transmissão é alta para SoftwareSerial, então tivemos que implementar funcionalidades de verificação de erros e nova tentativa. Em alguns casos, foi necessária persistência para obter uma leitura correta.
Poder
Os servos podem fornecer 19,5kg.cm a 7,4v. Usamos 6v e a corrente de estol estava abaixo de três amperes.
Programação
Você pode obter o código do Arduino no repositório Github do projeto.
Dois programas são usados para captura e reprodução de movimento, uma técnica semelhante à usada em filmes. Você começa moldando o robô em uma pose. Como o padrão dos servos é o motor desligado, você pode girar os servos manualmente. Depois de colocar o robô na postura desejada, use o programa Walbi_record para ler e exibir todos os ângulos do servo. Em seguida, você alimenta essas leituras de ângulo na variável poseAngles em Walbi_play e usa o programa para reproduzir a sequência de poses gravadas, em uma velocidade definida usando a variável timeToMove (em milissegundos).
Esperamos que você tenha gostado do projeto. Sinta-se à vontade para compartilhar seu amor deixando um comentário, inscrevendo-se no blog ou qualquer outro tipo de ação de feedback. Agradecemos!
Nuggets geeks internos
Aqui estão algumas dicas e truques aprendidos ao criar Walbi:
- Os suportes para o LX-16A são acoplados ao servo apenas em UMA posição, por isso é muito fácil conectá-los incorretamente, especialmente nas partes impressas em 3D. Tivemos que remontar o Walbi algumas vezes para corrigir erros de montagem que eram muito difíceis de detectar.
- Os servos vêm com ID 1 por padrão. Atribua a cada servo um ID diferente antes de montá-los no robô, ou será impossível se comunicar com vários servos seriais conectados com o mesmo ID.
- Usar abraçadeiras realmente melhora a aparência
- Os servos vêm com os parafusos necessários para conectar as pontas aos servos e as pontas aos suportes. Os suportes vêm com os parafusos necessários para fixá-los aos servos. Você precisará adquirir parafusos separadamente para suporte para conexões de suporte e suporte para conexão de peças de plástico. Usamos parafusos e porcas DIN912 M2-6 e M2-10.
- Você pode melhorar a tração colando almofadas de silicone nas solas dos pés do robô.
- É preferível usar chifres de servo de metal, já que os de plástico que vêm com os servos irão rasgar se (quando) as pernas se chocarem durante os testes. Se os chifres se rasgarem, o robô ficará frouxo e a reprodução do movimento perderá a precisão (o que de outra forma é surpreendentemente bom).
Código
Programas Arduino para controle de movimento e reprodução
https://github.com/ptavaressilva/WalbiPeças personalizadas e gabinetes
STL para peças impressas em 3D
Impresso originalmente em um arquivo Flash Forge Creator ProCAD em thingiverse.comProcesso de manufatura