


Robô de 4 rodas feito com Arduino controlado por Dabble
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Aplicativos e serviços online
 |
| |||
|
Sobre este projeto
Outro projeto, outra ideia de presente out-of-the-box! Apresentando a você o robô de 4 rodas controlado por Dabble - um robô simples e divertido de construir e fácil de controlar que pode ser controlado via Bluetooth usando Dabble, um aplicativo móvel desenvolvido internamente por nós. Tudo que você precisa para fazer seu robô é uma placa Arduino Uno, chassis, rodas, eixos de motor e outros acessórios e ferramentas. Para controlá-lo, você precisa instalar o Dabble do Google Play e emparelhá-lo com Bluetooth; e seu robô está pronto para ir a qualquer lugar!
Que melhor maneira de terminar o ano com o mesmo espírito faça-você-mesmo com que começou, certo? Então, o que você está esperando!
Então vamos começar!
Etapa 1:coisas de que você precisa
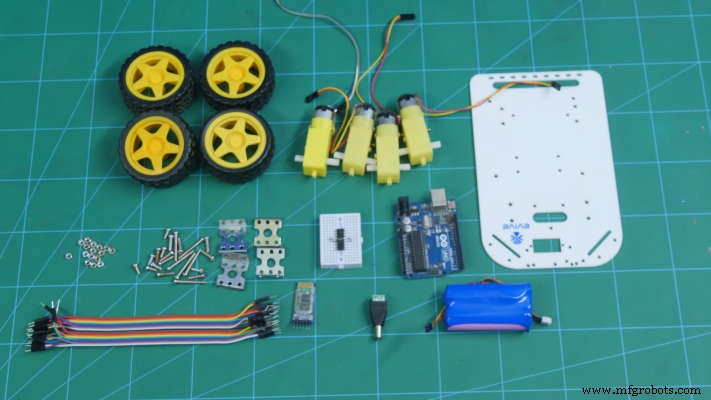
- Placa Arduino Uno
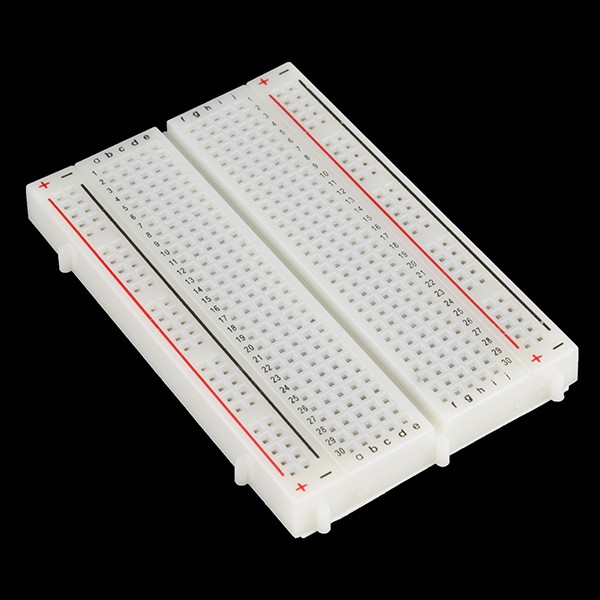
- Placa de ensaio
- Chassi
- Suportes de motor
- motores DC
- Roda
- Motorista
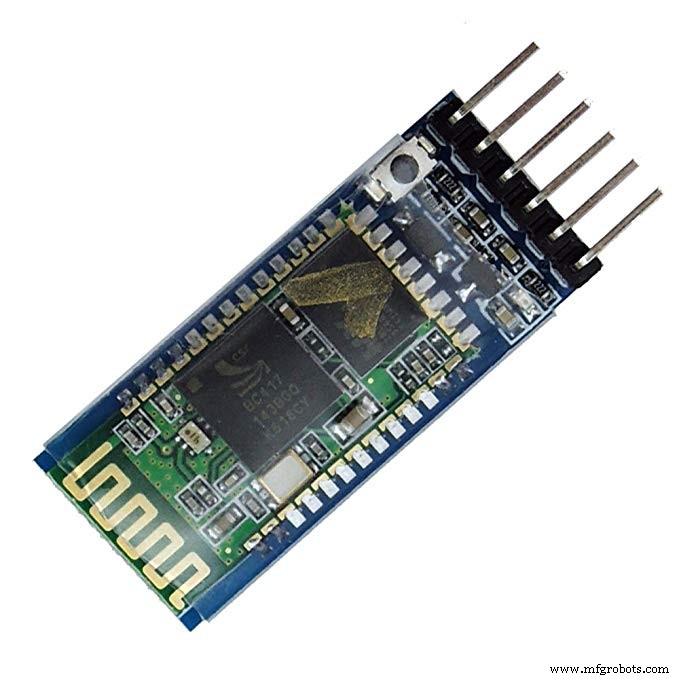
- Módulo Bluetooth HC05
- Bloco de terminais DC
- Bateria
- Cabos de jumpers
Etapa 2:fabricação do corpo
Em primeiro lugar, começaremos a fazer o corpo do Robô de 4 rodas.
Pegue o chassi e vire-o de cabeça para baixo.

Neste chassi monte 4 suportes de motor usando parafusos e porcas M3.
Fixe os motores CC e fixe-os nos suportes do motor usando porcas e parafusos M2.
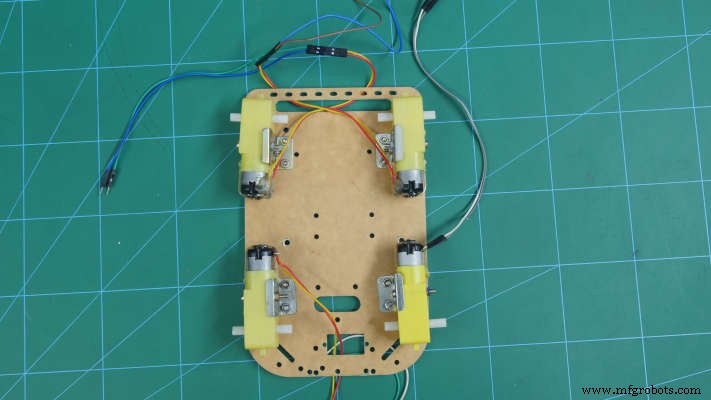
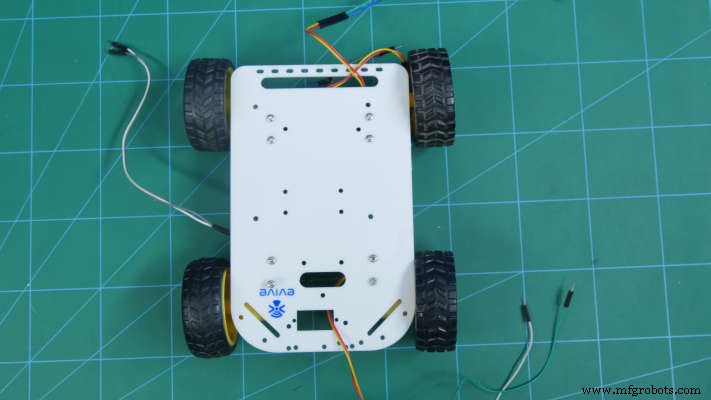
Prenda as rodas em cada eixo do Motor DC.

Vire a montagem, assim seu corpo é criado.
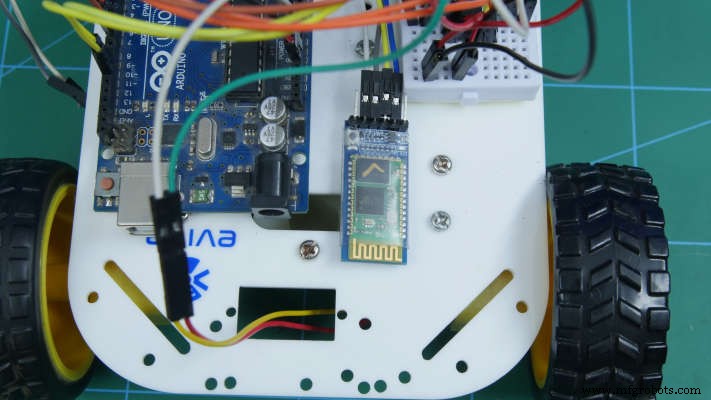
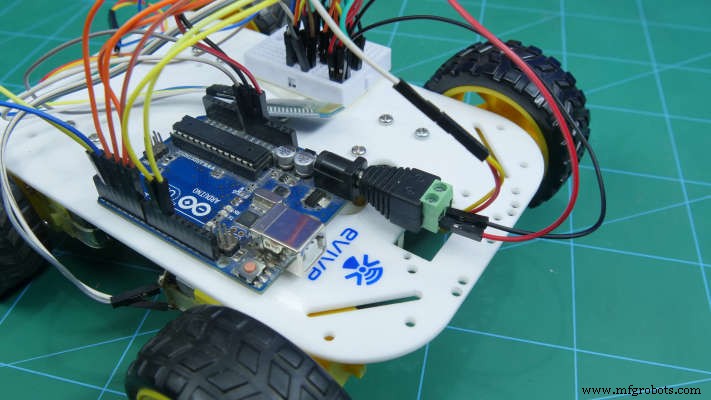
Etapa 3:adicionar o cérebro
O microcontrolador que vamos usar é o Arduino Uno.
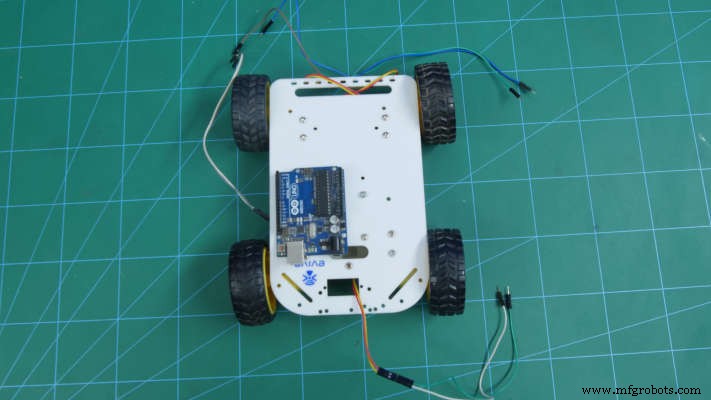

Faremos todas as conexões nele, mas também usaremos uma placa de ensaio para fazer as conexões.
Etapa 4:Fazendo conexões e usando o driver do motor
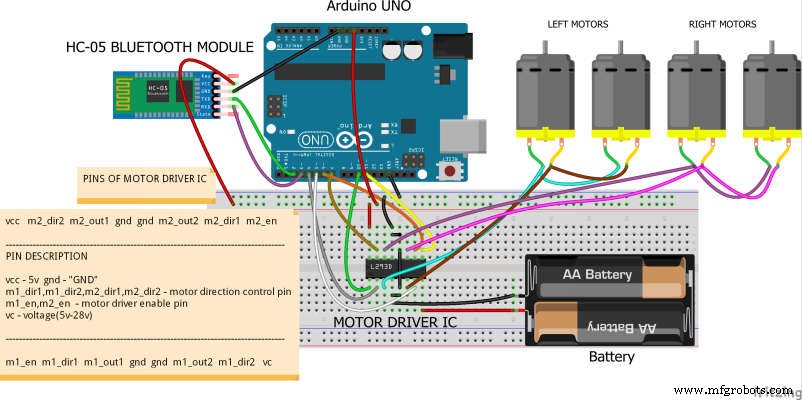
Faça a conexão conforme mostrado na figura abaixo.
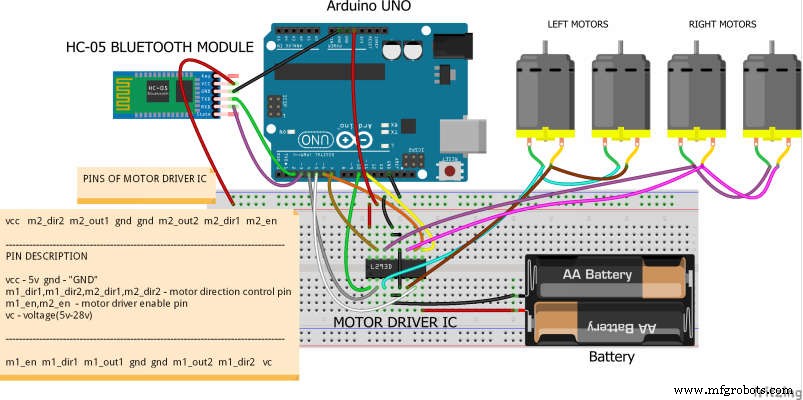
Vamos usar os drivers do motor porque o Arduino Uno não fornece potência suficiente para operar 4 motores. Assim, estaremos adicionando o driver do motor, poderemos dar ao robô a energia necessária.
Os dois motores da esquerda estão conectados em paralelo. Da mesma forma, os dois motores certos também estão conectados em paralelo. As conexões são feitas da seguinte forma:
- Ative os pinos - pinos digitais 10 e 11
- VCC - Arduino 5V
- m1_dir1, m1_dir2, m2_dir1, m2_dir2 - Pino digital 4, 5, 6 e 7
- VC - Bateria externa
- GND - GND do Arduino e bateriaCertifique-se de conectar todos os fios GND juntos.
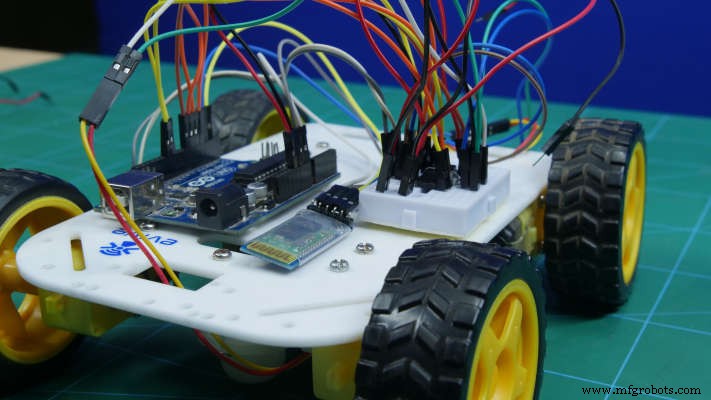
Etapa 5:conectar smartphone
Precisamos adicionar um módulo que fará a conexão entre o seu robô e o aplicativo Dabble no smartphone.
Estamos usando o Módulo Bluetooth HC05. Conecte-o conforme mostrado na figura de conexão.
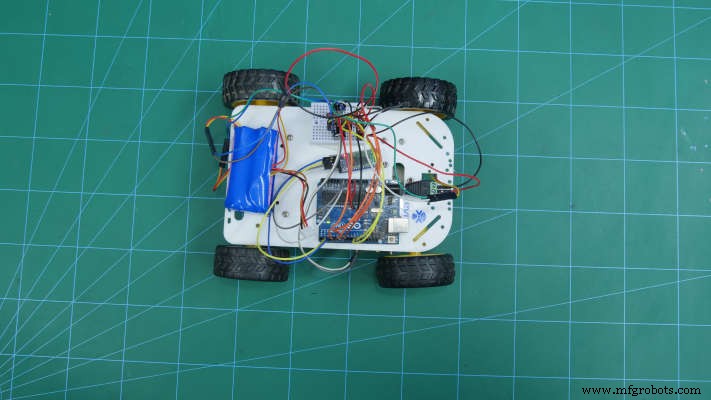
Etapa 6:adicionar a bateria
Precisamos adicionar uma fonte de energia extra ao nosso robô. Além disso, para conectar o Arduino Uno à bateria, usaremos o bloco de terminais DC ou o conector DC.
Etapa 7:Código Arduino
Faça upload do seguinte código:
robot.ino
Etapa 8:trabalhando
Podemos conectar facilmente nosso robô ao nosso Smartphone usando o Dabble.
Antes de trabalhar com qualquer um dos módulos, você precisa conectar o Bluetooth em que está trabalhando.
Existem muitos módulos disponíveis no aplicativo para outras funcionalidades.
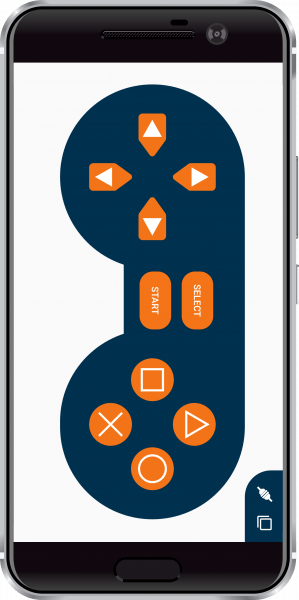
Hoje estaremos trabalhando com o Módulo Gamepad.
E usaremos o conjunto de botões esquerdo:
- Para cima - Avançar
- Para baixo - retroceder
- Esquerda - Vire à esquerda
- À direita - vire à direita
Etapa 9:Conclusão
Com isso, seu robô de 4 rodas controlado por DIYDabble está pronto para a ação!
Psiu! Só para você saber, o Dabble pode fazer muito mais do que apenas controlar robôs sem fio. Você pode explorar mais sobre isso aqui!
Código
- robot.ino
- biblioteca evive
robot.ino Arduino
/ * * * este projeto demonstra o controle do robô arduino 4 rodas usando o app Dabble * usaremos o módulo gamepad no modo digital * para obter mais informações sobre gamepad, acesse https://thestempedia.com/docs/dabble/game- pad-module / * * neste projeto estaremos usando o módulo bluetooth HC-05 * para arduino "UNO" use o módulo bluetooth buadrate abaixo de 38400 * * conexão do módulo bluetooth com arduino * * módulo bluetooth HC-05 ----> arduino "UNO" * * Tx ----> 2 * Rx ----> 3 * * Escrito por Punit chotaliya, STEMpedia * em 16 de janeiro de 2019 * * /// Para incluir o módulo GamePad no programa Arduino, você deve // incluir o seguinte cabeçalho:#define CUSTOM_SETTINGS # define INCLUDE_GAMEPAD_MODULE // inclui a biblioteca do aplicativo Dabble #include#define motor1_en 10 // motor 1 habilita o pino # define motor2_en 11 // motor 2 habilita o pino # define motor1_dir1 4 // motor 1 input1 (InputA) # define motor1_dir2 5 // motor 1 input2 (InputA) # define motor2_dir1 6 // motor 2 input1 (InputB) #define mo tor2_dir2 7 // motor 2 input2 (InputB) void setup () {// coloque seu código de configuração aqui, para ser executado uma vez:Serial.begin (9600); // inicia a comunicação serial usando 9600 baudrate Dabble.begin (38400); // Insira a taxa de transmissão do seu módulo bluetooth // NOTA:para arduino "UNO", use o módulo bluetooth buadrate abaixo de 38400 para (unsigned int i =4; i <8; i ++) {pinMode (i, OUTPUT); // declarando os pinos de entrada do motor1 e motor2 como um pino de saída} pinMode (motor1_en, OUTPUT); // declarando os pinos de habilitação do motor como um pinMode de saída (motor2_en, OUTPUT); } void loop () {// coloque seu código principal aqui, para executar repetidamente:Dabble.processInput (); // Para atualizar os dados que o arduino UNO obteve do aplicativo móvel, você deve usar a seguinte linha de código if (GamePad.isUpPressed ()) // se UP for pressionado no gamepad, mova o robô para frente {Serial.print ("ACIMA"); frente(); } else if (GamePad.isDownPressed ()) // se DOWN for pressionado no gamepad, mova o robô para trás {Serial.print ("DOWN"); para trás(); } else if (GamePad.isLeftPressed ()) // se LEFT for pressionado no gamepad, mova o robô LEFT {Serial.print ("Left"); deixou(); } else if (GamePad.isRightPressed ()) // se RIGHT for pressionado no gamepad, mova o robô RIGHT {Serial.print ("Right"); direito(); } else // parar o robô {Serial.println ("strop"); Pare(); }} void forward () // função para movimento de avanço do robô {analogWrite (motor1_en, 255); analogWrite (motor2_en, 255); digitalWrite (motor1_dir1, HIGH); digitalWrite (motor1_dir2, LOW); digitalWrite (motor2_dir1, HIGH); digitalWrite (motor2_dir2, LOW); } void backward () // função para movimento para trás do robô {analogWrite (motor1_en, 255); analogWrite (motor2_en, 255); digitalWrite (motor1_dir1, LOW); digitalWrite (motor1_dir2, HIGH); digitalWrite (motor2_dir1, LOW); digitalWrite (motor2_dir2, HIGH); } void left () // função para movimento para a esquerda do robô {analogWrite (motor1_en, 255); analogWrite (motor2_en, 255); digitalWrite (motor1_dir1, LOW); digitalWrite (motor1_dir2, HIGH); digitalWrite (motor2_dir1, HIGH); digitalWrite (motor2_dir2, LOW); } void right () // função para movimento para a direita do robô {analogWrite (motor1_en, 255); analogWrite (motor2_en, 255); digitalWrite (motor1_dir1, HIGH); digitalWrite (motor1_dir2, LOW); digitalWrite (motor2_dir1, LOW); digitalWrite (motor2_dir2, HIGH); } void Stop () // // função sem movimento {analogWrite (motor1_en, 0); analogWrite (motor2_en, 0); digitalWrite (motor1_dir1, LOW); digitalWrite (motor1_dir2, LOW); digitalWrite (motor2_dir1, LOW); digitalWrite (motor2_dir2, LOW); }
Biblioteca evive C / C ++
Sem visualização (somente download).
Esquemas
Lembrete de aniversário que dura 50 anos
Arduino - Monitorando a porta aberta via Facebook Messenger
Processo de manufatura
- Robô Raspberry Pi controlado por Bluetooth
- Construa seu robô de streaming de vídeo controlado pela Internet com Arduino e Raspberry Pi
- Robô controlado por Wi-Fi usando Raspberry Pi
- Luzes de dimerização com PWM usando o botão de ação
- Brinquedo controlado pelo Android usando Raspberry Motor Shield
- Obstáculos para evitar o robô com servo motor
- Robô seguidor de linha
- Braço robótico controlado por Nunchuk (com Arduino)
- Robô controlado por fala
- MobBob:DIY Arduino Robot Controlado por Smartphone Android