


Motor de passo impresso em 3D
Componentes e suprimentos
 |
| × | 1 | |||
| × | 6 | ||||
| × | 8 | ||||
| × | 4 | ||||
| × | 1 |
Sobre este projeto
https://www.youtube.com/embed/v2FNUNALSTwRecentemente descobri este instrutível de um motor DC impresso em 3D e achei que poderia dar um passo avançar; Literalmente. Projetei este motor de passo com oito eletroímãs, seis ímãs de neodímio, um rotor impresso em 3D e estator. Este é especificamente um motor de passo de ímã permanente capaz de etapas completas de 15 graus e etapas de meio de 7,5 graus. Existem muitos tipos diferentes de motores de passo, mas a maioria deles funciona de forma muito semelhante ao que projetei aqui. Esta é uma exibição educacional para mostrar aos outros como os motores de passo funcionam. Eu projetei isso para funcionar com uma fonte de alimentação de 5 a 12 VCC para que funcione com a maioria das fontes de alimentação USB.
Também estou dando um sorteio no meu canal do Youtube. Estarei dando um arduino, transistores usados neste projeto e alguns interruptores. Mais detalhes na última etapa.
Etapa 1:O que você precisará
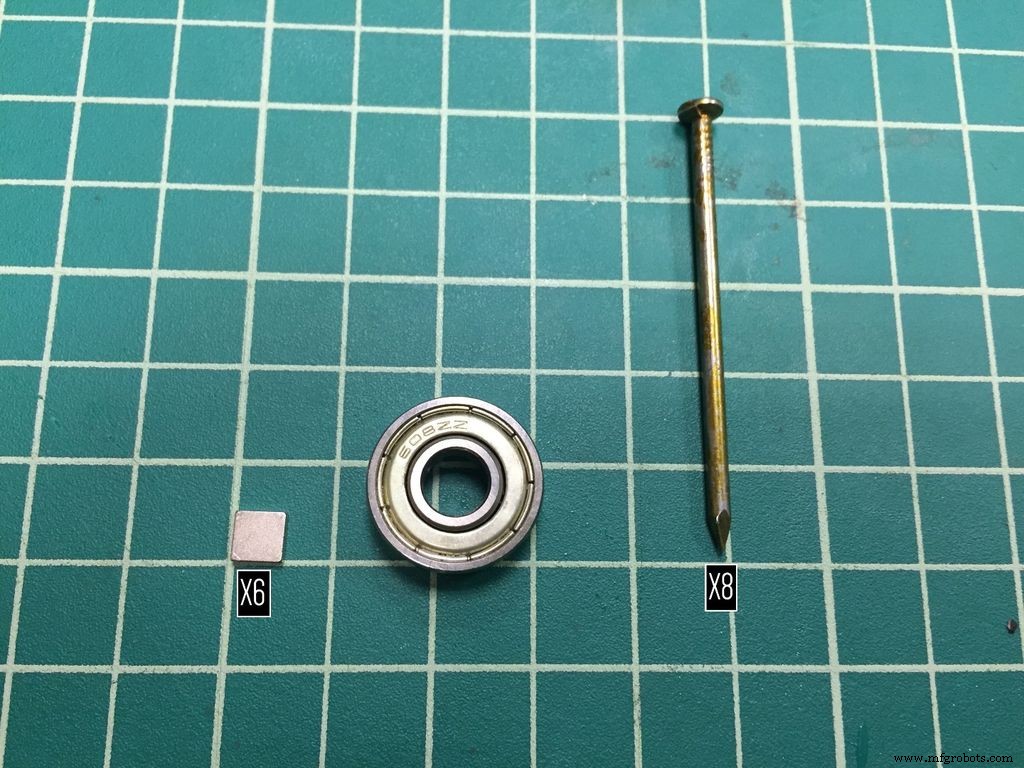


- Seis ímãs de neodímio de 1/4 "
- 608ZZ Bearing
- Oito unhas de 8d 2-3 / 8 "- Não é crítico quais unhas você usa, desde que caibam.
- Fio magnético - usei fio magnético de 0,315 mm, mas isso não é crítico.
- Arduino Uno
- Quatro transistores - usei transistores PNP que tinha por aí, mas você pode usar quaisquer transistores ou MOSFETs, contanto que tenha certeza de que eles podem lidar com a corrente que seu motor vai consumir. Leia a folha de dados com atenção para recomendações específicas. Na mina de 5v, o motor consome cerca de 1 ampere e em 12v exige cerca de 3 amperes.
- Rotor e estator impressos em 3D
- cola
- Fita Elétrica
- Uma bússola
Etapa 2:imprimir o rotor do dodecágono e o estator do octógono
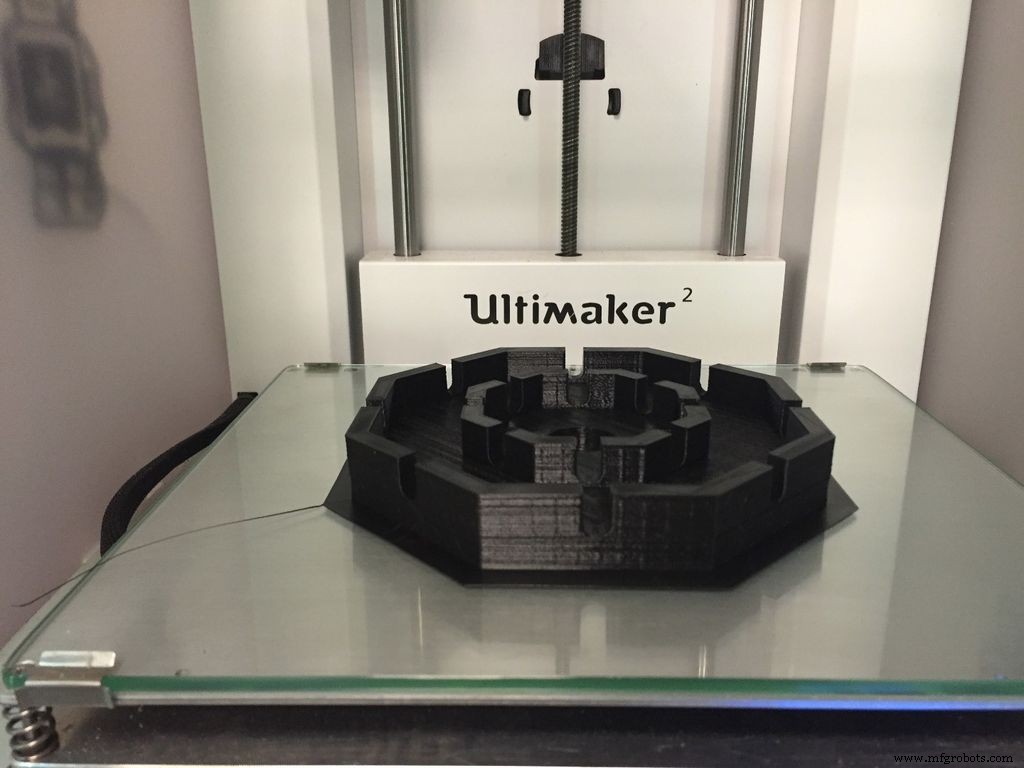
Imprima com hubs 3D!
Etapa 3:



Use uma bússola para determinar os pólos dos ímãs e cole-os com os pólos norte voltados para fora. Se seus ímãs forem fortes o suficiente, a bússola de alguns smartphones mostrará a polaridade dos ímãs.
Etapa 4:
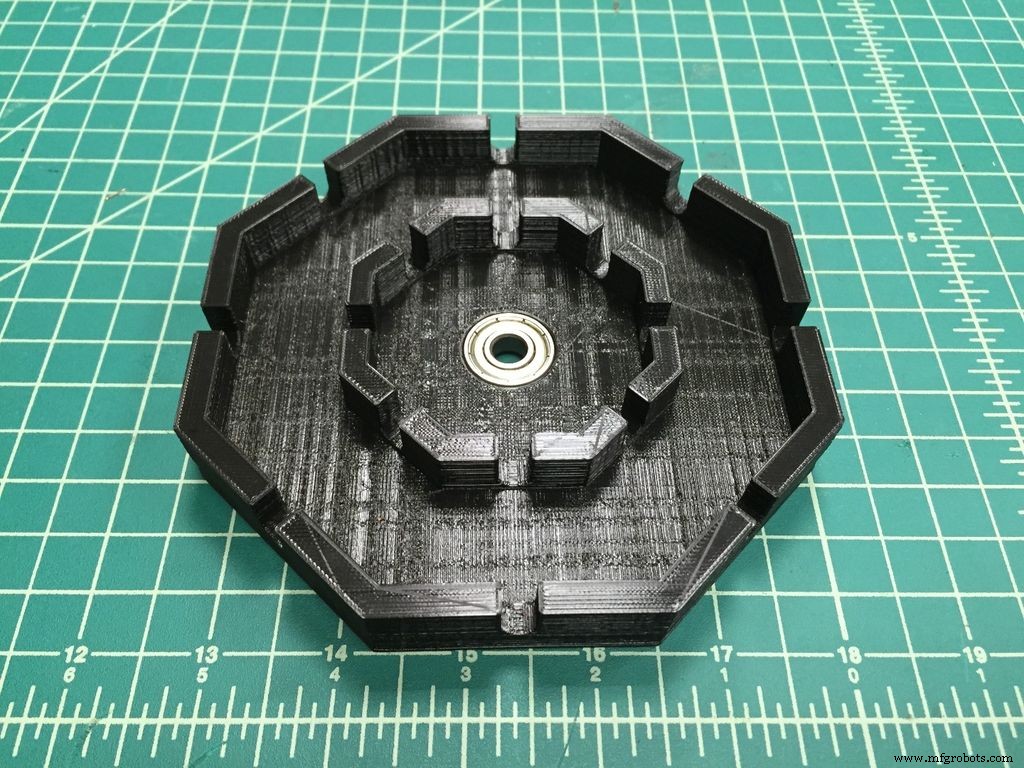

Ajuste o rolamento no estator por pressão e, a seguir, pressione o rotor no rolamento. Fiquei agradavelmente surpreso com o quão bem a pressão do rolamento se encaixou no estator. Ao imprimir em 3D, os furos tendem a diminuir para dentro e acabar menores do que o esperado, então geralmente os sobredimensiono um pouco.
Etapa 5:
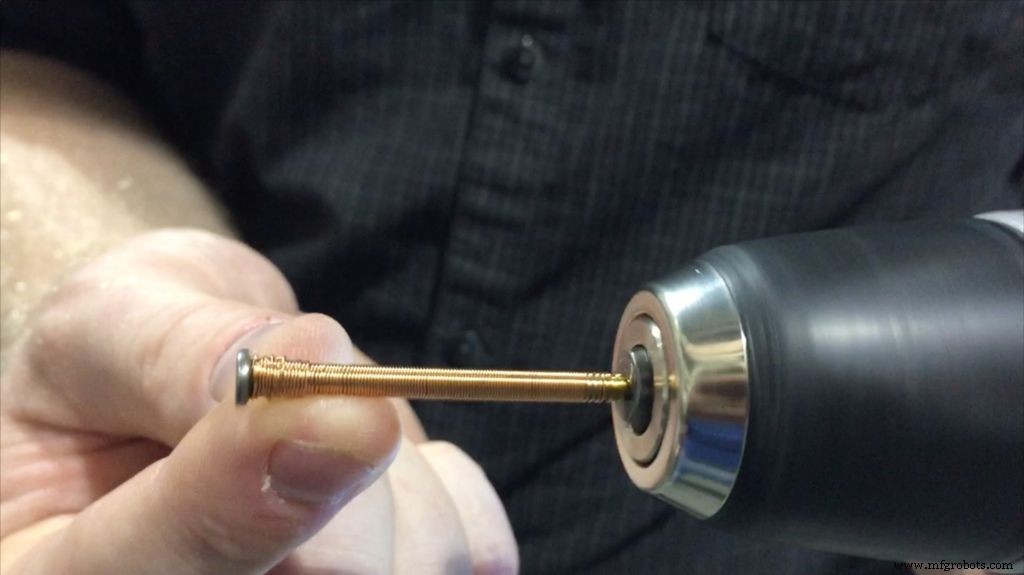

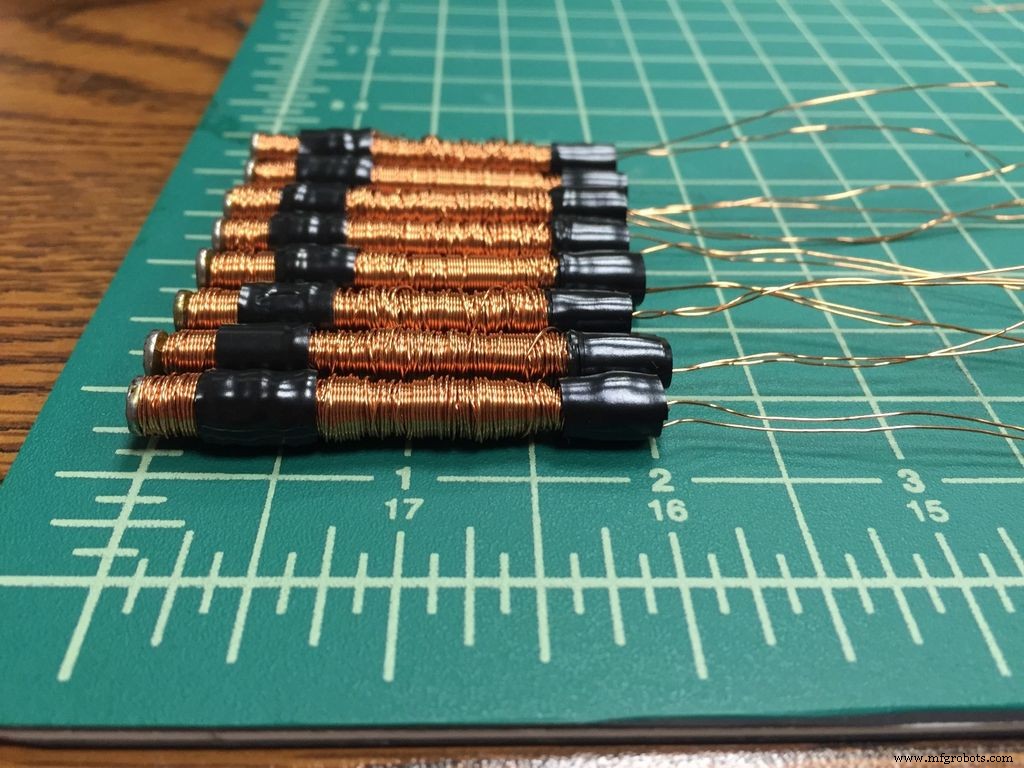
Corte 9 pedaços de arame a 25 pés e enrole-os com uma furadeira. Use uma bússola e uma bateria para determinar a configuração necessária para dar a você o pólo sul na ponta do prego. Use um marcador ou tubo termorretrátil para marcar o terminal negativo de seus eletroímãs. Enrole as seções dos eletroímãs com fita isolante, onde entrarão em contato com a caixa do estator. Isso serve a dois propósitos. Ele fixa firmemente os eletroímãs no lugar e também isola a caixa de qualquer calor que a bobina possa produzir. Os pares de bobinas consomem cerca de 1 A com a fonte de alimentação de 5 V que estou usando. Os transistores que escolhi funcionam com uma fonte de alimentação de 12 V da qual as bobinas consomem cerca de 3 amperes. O problema com a fonte de tensão mais alta é que, se eu deixá-la funcionando por um tempo, as bobinas começam a esquentar.
Aviso:
Eu projetei isso para funcionar com uma fonte de alimentação de 5-12 VCC. Se você decidir se desviar do caminho conhecido, use a Lei de Ohm para determinar o tamanho das bobinas que deseja. V =I * R
Lembre-se de que quanto menos enrolamentos na bobina, menor será a resistência. Se você não tomar cuidado, suas bobinas puxarão mais corrente do que a fonte de alimentação ou os transistores podem suportar e coisas ruins acontecerão.
Etapa 6:
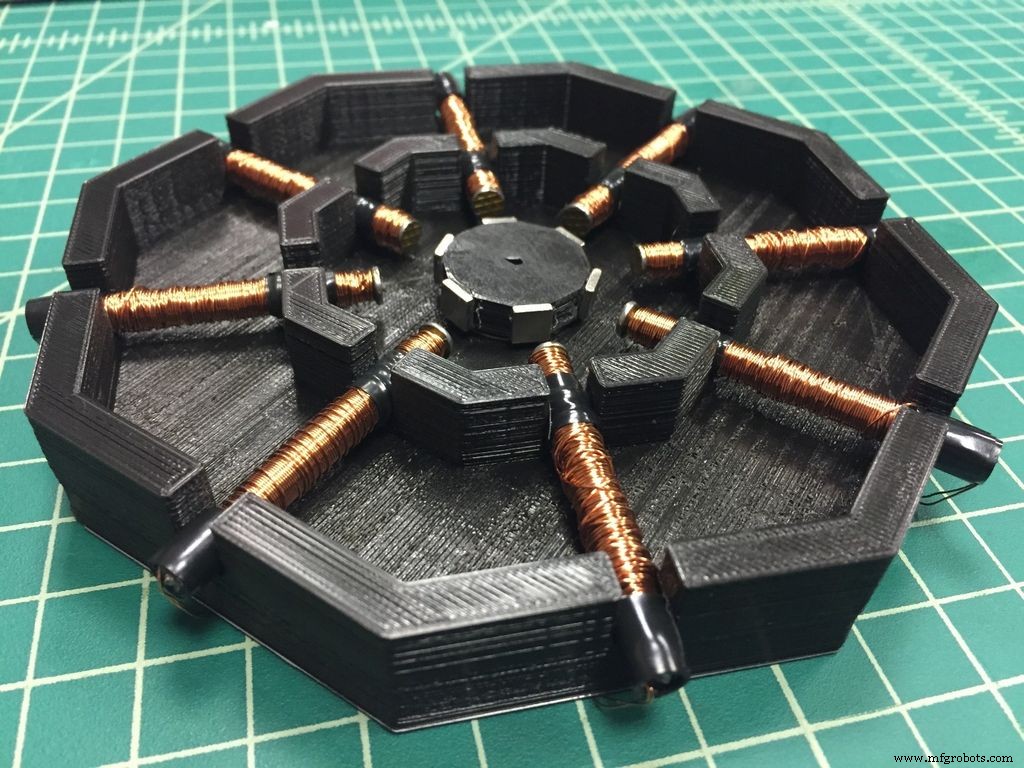
Empurre os eletroímãs no estator até que estejam a cerca de 1/4 "dos ímãs de neodímio. Você pode deslizar os eletroímãs para dentro e para fora como quiser, mas não os queria muito perto porque os pregos se magnetizam muito mais rápido. Essa é a desvantagem de usar os pregos. O motor ainda funcionará quando eles ficarem magnetizados, mas será menos eficiente. As hastes de soldagem são uma boa alternativa para os pregos se você tiver alguns por aí.
Etapa 7:Soldar tudo junto
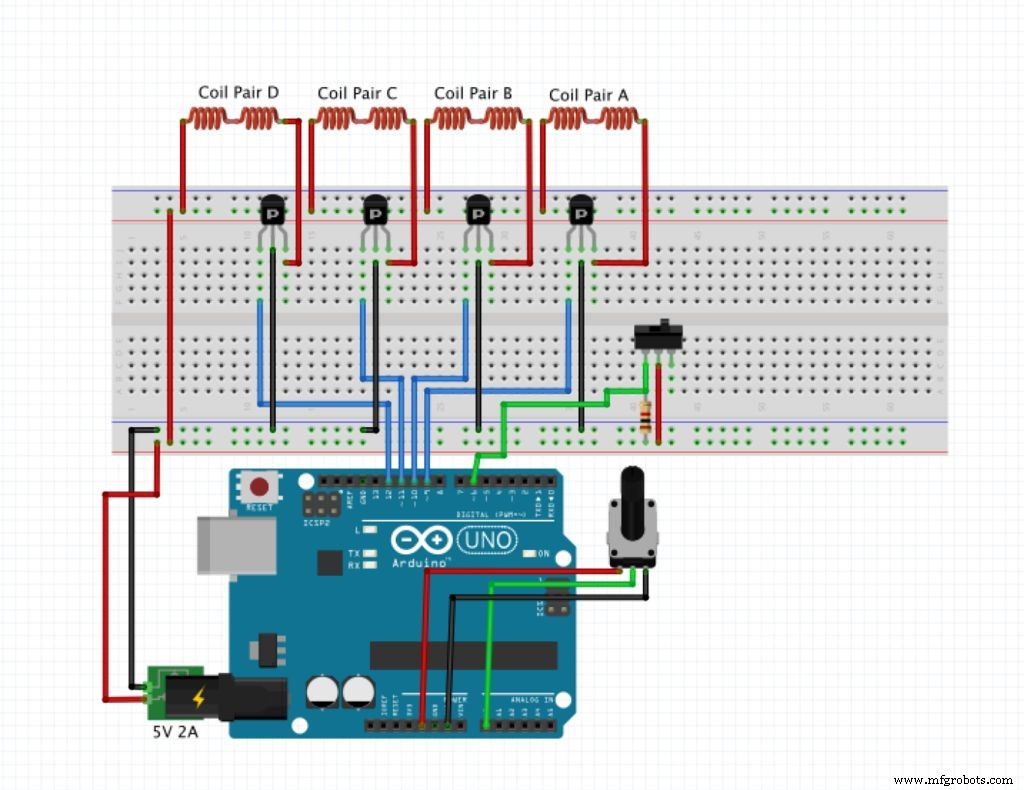
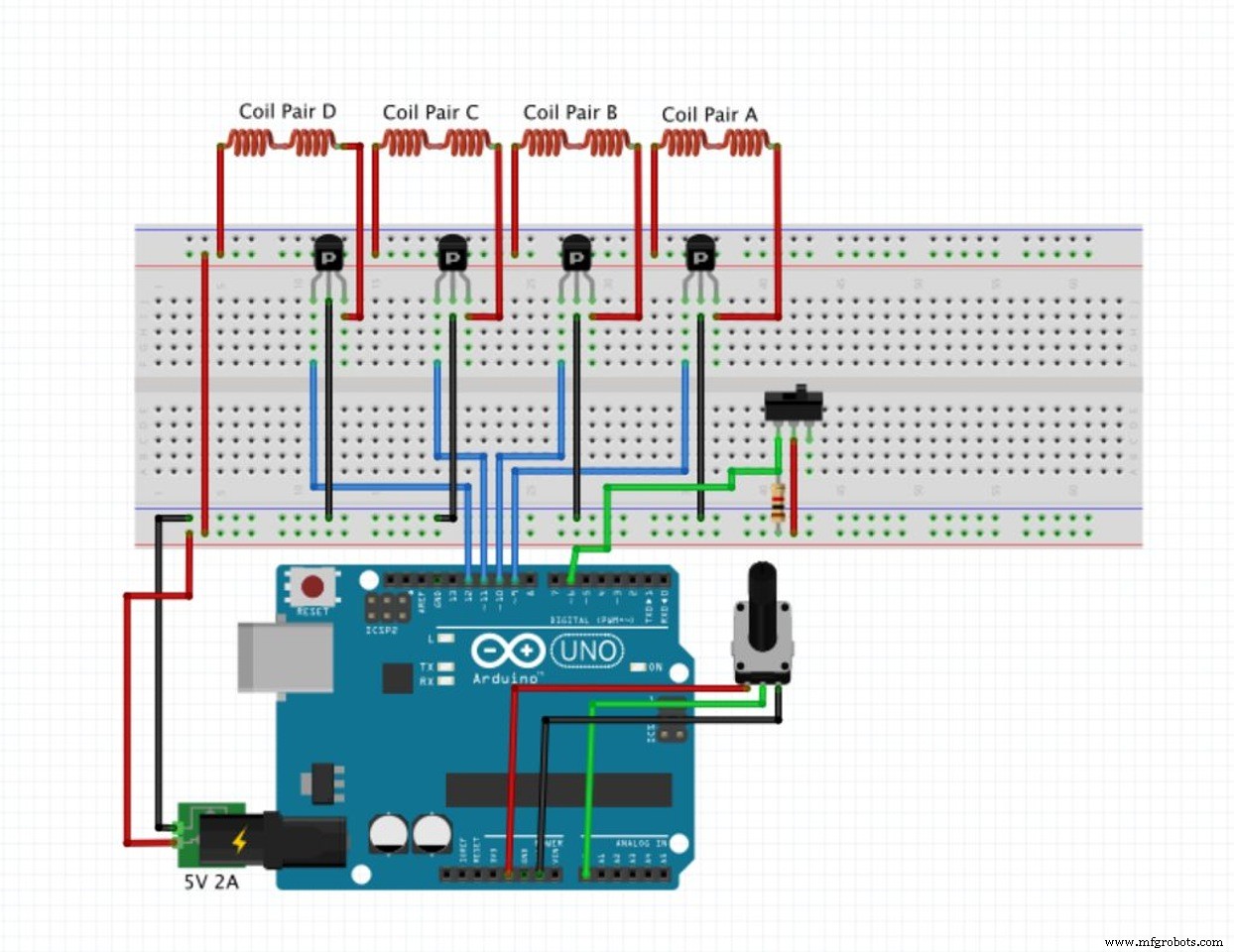
Ligue seus pares de bobinas em série e conecte-os de modo que todos os pólos sul dos eletroímãs fiquem voltados para dentro. O resistor que usei no esquema é um resistor de 1k. O objetivo disso é evitar que o pino digital "flutue" alto quando estiver na posição desligada. Mais uma vez, certifique-se de usar um transistor capaz de suportar a corrente exigida por suas bobinas.
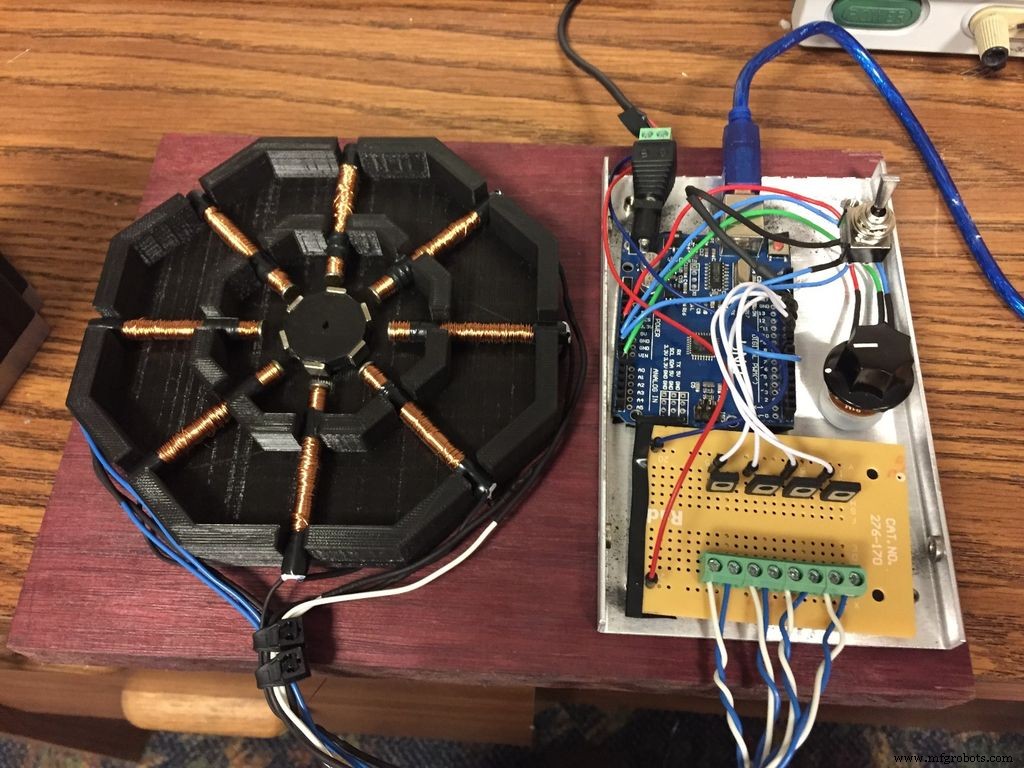
Carregue o código-fonte para o seu arduino e você estará pronto para começar!
Etapa 8:Pague com antecedência!

Estarei doando um arduino, os transistores usados neste projeto, junto com alguns interruptores e fios de jumper.
Regras do sorteio:
Inscreva-se no meu Canal do YouTube , como este vídeo e deixe um comentário no vídeo dizendo o que você gostaria de me ver construir a seguir. No dia 1º de setembro, selecionarei aleatoriamente o comentário de um assinante e os enviarei de graça! Obrigado pessoal por serem uma comunidade tão acolhedora!
Código
- Printed_Stepper_Motor.ino
Printed_Stepper_Motor.ino Texto simples
/ * 010100000111001001101111011101000110111100100000010001113D Motor de passo impresso criado em 15 de agosto de 2015Modificado em 15 de agosto de 2015 por Anthony Garofalo (Proto G) Visite meu canal do YouTube aqui:https://www.youtube.com/channel/UCpTuKJrXFwybnpOG7Hpágina aqui:httpZwybnpOGables / InstrutorZwispOG7Hpuct7H /www.instructables.com/member/Proto+G/ _____ ______ _____ _______ _____ ______ | _____] | _____ / | | | | | | ____ | | \ _ | _____ | | | _____ | | _____ | 01010000011100100110111101110100011011110010000001000111 * / int Delay; int reverseSwitch; void setup () {// inicializa o pino digital 13 como uma saída. pinMode (9, SAÍDA); pinMode (10, SAÍDA); pinMode (11, SAÍDA); pinMode (12, SAÍDA); pinMode (13, SAÍDA); // pino led para visual pinMode (6, INPUT); // a chave seletora está conectada ao pino digital 6 para reverter a direção} void loop () {reverseSwitch =digitalRead (6); if (reverseSwitch ==HIGH) {// se a chave reversa estiver alta, gire o rotor no sentido anti-horário Delay =analogRead (0); Atraso =mapa (Atraso, 0, 1023, 60, 2000); digitalWrite (12, ALTO); digitalWrite (13, ALTO); atraso (atraso); digitalWrite (12, BAIXO); digitalWrite (13, BAIXO); atraso (5); Atraso =analogRead (0); Atraso =mapa (Atraso, 0, 1023, 60, 2000); digitalWrite (11, ALTO); atraso (atraso); digitalWrite (11, BAIXO); atraso (5); Atraso =analogRead (0); Atraso =mapa (Atraso, 0, 1023, 60, 2000); digitalWrite (10, ALTO); digitalWrite (13, ALTO); atraso (atraso); digitalWrite (10, BAIXO); digitalWrite (13, BAIXO); atraso (5); Atraso =analogRead (0); Atraso =mapa (Atraso, 0, 1023, 60, 2000); digitalWrite (9, ALTO); atraso (atraso); digitalWrite (9, BAIXO); atraso (5); } else {// se a chave reversa não estiver alta, gire o rotor no sentido horário Delay =analogRead (0); Atraso =mapa (Atraso, 0, 1023, 60, 2000); digitalWrite (9, ALTO); digitalWrite (13, ALTO); atraso (atraso); digitalWrite (9, BAIXO); digitalWrite (13, BAIXO); atraso (5); Atraso =analogRead (0); Atraso =mapa (Atraso, 0, 1023, 60, 2000); digitalWrite (10, ALTO); atraso (atraso); digitalWrite (10, BAIXO); atraso (5); Atraso =analogRead (0); Atraso =mapa (Atraso, 0, 1023, 60, 2000); digitalWrite (11, ALTO); digitalWrite (13, ALTO); atraso (atraso); digitalWrite (11, BAIXO); digitalWrite (13, BAIXO); atraso (5); Atraso =analogRead (0); Atraso =mapa (Atraso, 0, 1023, 60, 2000); digitalWrite (12, ALTO); atraso (atraso); digitalWrite (12, BAIXO); atraso (5); }} Peças personalizadas e gabinetes
Esquemas
Processo de manufatura
- Motor de relutância
- Motores de passo
- Placa de circuito impresso
- Drivers integrados facilitam o design do motor de passo
- Protótipo da Raspoulette
- Torre Sentinela Nerf Autônoma
- Biblioteca de motor de passo bipolar
- A área cinzenta entre servomotores e motores de passo
- O que é um Motor Linear?
- O que é um servo motor?