


Controle PID da Garra do Robô em Matlab / Simulink
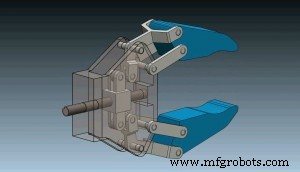
Neste Tutorial veremos como fazer o controle PID do Modelo 3D de um Mecanismo de Garra de Robô. O modelo Simulink é organizado em dois subsistemas. Um subsistema DC Motor que é modelado usando blocos Simulink e um modelo 3D que é importado do Solidworks usando o SimMechanics Link. Usamos uma função de etapa para ativar o Motor DC para acionar o Robot Gripper e usamos o Bloco PID Simulink para ajustar automaticamente os parâmetros do PID.
Você pode assistir ao vídeo a seguir ou ler o tutorial escrito abaixo.
Faça o download do modelo Simulink do exemplo aqui:

Modelo Simulink - Controle PID
1 arquivo(s) Download de 538,71 KBEncontre e baixe o modelo 3D do mecanismo de garra do robô no seguinte link:
Processo de manufatura
- O Futuro da Robótica
- Pílula anticoncepcional
- Model Train
- Robô Industrial
- Tutorial - sPiRobot:controle e veja o que seu robô está vendo de qualquer lugar
- Robô de classificação de reciclagem com Google Coral
- MATLAB - Simulink
- Princípios básicos de controle PID e ajuste de loop
- Controle PID da Garra do Robô em Matlab / Simulink
- Simulação Solidworks e Matlab/Simulink