


Tipos de robôs industriais e seus diferentes usos
Descubra os muitos tipos de robôs industriais e suas capacidades exclusivas. Obtenha uma compreensão clara dos usos e aplicações de cada tipo de robô hoje:braços de robô, robôs móveis, drones aéreos, robôs subaquáticos e cobots.
Como você decide qual tipo de robô industrial é o mais adequado?
Existem tantos tipos diferentes de robôs no mercado - como saber qual tipo usar? Tal como acontece com muitos problemas de design e engenharia, “a forma segue a função”. Ou seja, o tipo de robô necessário depende de sua função pretendida. O robô será preso ao chão ou outra superfície, ou precisa ser móvel? Quantas unidades por hora o robô deve ser capaz de processar? Qual é o peso máximo que o robô deve levantar? Se o robô está preso em um lugar, qual é o tamanho do envelope de trabalho? O envelope de trabalho é retangular ou circular? Responder a essas perguntas restringirá suas escolhas rapidamente e permitirá que você selecione o tipo ideal de robô industrial para seus objetivos.
Neste artigo, examinamos diferentes tipos de robôs, seus pontos fortes e fracos e como determinar para que usá-los.
Conteúdo deste artigo
- Robôs estacionários (braços robóticos)
- Robôs móveis autônomos
- Robôs voadores (drones aéreos)
- Robôs subaquáticos
- Como obter o tipo de robô ideal para sua organização
Robôs Estacionários (Braços Robóticos)
Existem sete tipos principais de robôs estacionários disponíveis no mercado. Por estacionário, queremos dizer robôs que são aparafusados ao chão, teto ou alguma outra superfície - eles não são móveis. Geralmente, os robôs estacionários são braços robóticos projetados para tarefas como separação e colocação, classificação, montagem, soldagem e acabamento.
Aqui, consideramos os diferentes tipos de braços robóticos e suas características e usos.
- Braços robóticos articulados
- Robôs cartesianos ou retangulares
- Robôs SCARA
- Robôs polares ou esféricos
- Robôs Delta ou Paralelos
- Robôs Gantry
- Cilíndrico
- Robôs / Cobots colaborativos
Braços de robô articulados
Vantagens: Movimento mais flexível de todos os tipos de braço do robô. Pode ser bastante poderoso, capaz de levantar objetos pesados.
Desvantagens: Pode ser necessário cercar. Mais lento do que alguns dos outros braços do robô. Mais caro do que outros braços de robô. Necessita de sistemas de controle mais sofisticados.
Em comparação com outros tipos de braços de robô, o movimento de um braço de robô articulado mais se assemelha a um braço humano. Um braço articulado típico tem seis eixos ou articulações. Pode haver menos ou mais, dependendo do aplicativo e do fabricante. Quanto mais articulações um robô tem, mais suave e menos "semelhante a um robô" seu movimento se torna. Essa flexibilidade de movimento é descrita por Graus de liberdade.
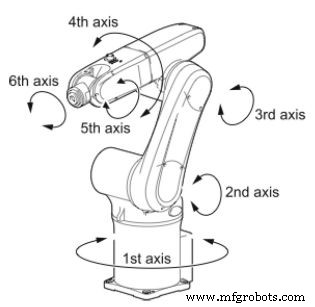
Fato interessante: Os designers de mãos artificiais consideram que a mão humana tem 27 graus de liberdade. Um braço humano tem 7 graus de liberdade, para um total combinado entre o braço e a mão humanos de 34 graus de liberdade.
Para replicar todas as maneiras sutis que o braço e a mão humanos podem se mover seria muito caro e complexo para um robô industrial. É geralmente aceito que 6 graus de liberdade em um braço de robô industrial são suficientes para realizar quase qualquer tarefa necessária.
O robô não conseguirá tocar piano, mas não precisa!
Dependendo da aplicação, um braço de robô pode ser equipado com uma pinça, o equivalente robótico de uma mão. Normalmente, as garras do robô são muito mais simples do que a mão humana. Às vezes, eles podem ser tão simples como uma ventosa ou um eletroímã. Ou, talvez, uma pinça macia de três dedos possa ser usada para pegar objetos delicados, como produtos frescos ou um ovo. Existem muitos tipos diferentes de pinças, e nenhuma pinça robótica única foi encontrada para lidar com todas as aplicações.
Alternativamente, o End of Arm Tooling (EoAT), como é chamado, pode ser algum tipo de ferramenta, talvez uma ferramenta rotativa que segura uma broca, ou algum outro tipo de broca, para rebarbar, retificar ou fresar. Existem muitas possibilidades, incluindo EoAT especializado para soldagem, pintura, lixamento, corte a laser e muito mais.
Os robôs articulados são altamente flexíveis, pois todas as suas articulações podem girar, ao contrário das articulações lineares ou translacionais, que só podem se mover em linha reta.
Os robôs articulados são usados em aplicações como pick and place, soldagem a arco, soldagem a ponto, embalagem, manutenção de máquinas e manuseio de materiais. A capacidade de produzir arcos (ou padrões semelhantes) em locais de difícil acesso torna os robôs articulados um bom candidato para a indústria automotiva e outras manufaturas que exigem essa habilidade.
Historicamente, robôs grandes e poderosos de braço articulado, capazes de pegar objetos pesando uma tonelada ou mais, não eram equipados com sensores que lhes permitissem ter consciência de seu ambiente. Se uma pessoa ficar no caminho de tal robô, ela pode ficar gravemente ferida ou até morrer.
Como resultado, esses braços robóticos precisam ser separados em um espaço próprio. Somente pessoal qualificado que compreende totalmente o funcionamento do robô tem permissão para entrar no espaço com paredes ou cercas dentro do qual esses robôs operam.
No entanto, se um braço de robô articulado estiver equipado com sensores e software de controle apropriados, ele pode operar com segurança perto de pessoas. Por exemplo, usando visão computacional com uma câmera ou talvez um sensor LiDAR, se tal robô sentir que algo está no caminho de seu movimento, ou mesmo que uma pessoa ou objeto está se aproximando e ainda não no caminho, o robô pode desacelerar ou parar. Outros sensores podem detectar uma colisão - se o braço bater em algo, ele irá parar e / ou reverter o curso. Normalmente, braços articulados que são seguros para operar ao lado de pessoas são projetados para serem limitados em sua velocidade e força.
Robôs cartesianos ou retangulares
Vantagens: Sistema de controle simples. Dependendo do modelo, pode levantar objetos muito pesados. Preciso. Rígido em todos os três eixos. Menos caro do que os braços articulados.
Desvantagens: Não pode fazer movimentos rotacionais.
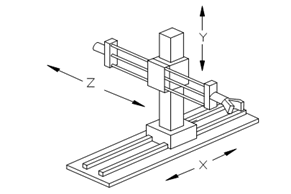
Esses robôs usam o sistema de coordenadas cartesianas (X, Y e Z) para movimentos lineares ao longo dos três eixos (para frente e para trás, para cima e para baixo e de lado a lado). Todas as três articulações são translacionais, o que significa que o movimento da articulação é restrito a uma linha reta. É por isso que esses robôs também são chamados de robôs “lineares”.
Os robôs cartesianos podem ser usados para pick-and-place, manuseio de materiais, automação de embalagens, armazenamento e recuperação, corte e perfuração e muitas outras aplicações.
Eles são rígidos em todas as três dimensões, o que os torna muito precisos e reproduzíveis. Eles são mais simples do que os braços robóticos articulados, com controle de software mais simples e podem ser mais baratos, dependendo da aplicação.
Robôs de pórtico - um tipo de robô cartesiano
Vantagens: Dependendo do modelo, pode levantar objetos muito pesados. Pode ser muito grande, abrangendo toda a extensão da instalação, se desejado. Pode ser muito econômico para as aplicações certas.
Desvantagens: Não pode fazer movimento rotacional.

Os robôs cartesianos ou lineares podem ser configurados como robôs gantry. Robôs de pórtico movem-se ao longo de uma trilha suspensa. Dependendo de seu projeto, os robôs de pórtico podem lidar com cargas muito pesadas e movê-las com rapidez e precisão. Eles também podem ser muito grandes, se necessário, cobrindo todo o espaço físico de uma instalação. Robôs de pórtico menores podem ser úteis para pick-and-place e outras operações envolvendo alta precisão e boa rigidez.
Como o aspecto de controle de movimento do robô linear é relativamente simples, geralmente é mais barato do que outros tipos de robôs e pode ser uma solução altamente econômica para muitas tarefas de automação.
O envelope de trabalho de um robô cartesiano é retangular. Adicionar o movimento vertical significa que o envelope de trabalho tem a forma de uma caixa.
robôs SCARA
Vantagens: Excelente para muitas aplicações de montagem. Rápido e preciso. Econômico para operações de montagem.
Desvantagens: Não tão flexível quanto os braços articulados. Não tão preciso quanto as armas cartesianas. Não tão rápido quanto os braços do robô Delta.
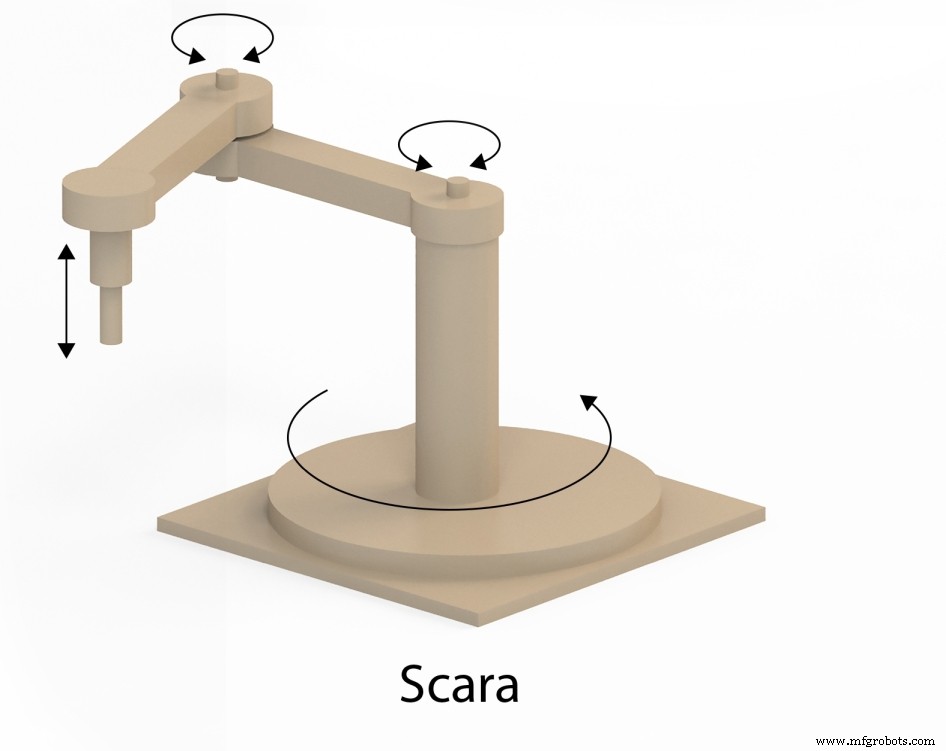
Os robôs SCARA (Selective Compliance Assembly Robot Arm) são semelhantes aos robôs cartesianos porque se movem em 3 articulações ou eixos. No entanto, em contraste com os robôs cartesianos, duas das articulações dos robôs SCARA são rotacionais. Eles são, portanto, capazes de movimentos mais complexos do que os robôs cartesianos. Eles são geralmente mais rápidos e têm mais flexibilidade de movimento, mas são menos precisos do que os robôs cartesianos.
Fato interessante: O uso generalizado de robôs SCARA revolucionou a pequena indústria eletrônica. Devido ao seu tamanho reduzido, simplicidade e características de design, eles são especialmente adequados para esta área de aplicação e provaram ser altamente econômicos.
Como a “montagem” no nome indica, o braço do robô SCARA foi inventado para aplicações de montagem. O robô SCARA foi criado em 1981 por Hiroshi Makino na Universidade Yamanashi no Japão. O “cumprimento” no nome refere-se a uma certa quantidade de “dar”. Ou seja, se você empurrar um robô SCARA no plano horizontal, ele cederá um pouco - ele se moverá, não é totalmente rígido. Porém, no plano vertical, um robô SCARA é bastante rígido e não “cederá” se você empurrá-lo nessa direção. Portanto, tem conformidade “seletiva”. É compatível no plano horizontal e não no plano vertical.
A conformidade seletiva é bastante útil em operações de montagem em que uma peça precisa ser inserida em uma placa de circuito, por exemplo. Esse tipo de montagem geralmente requer que uma peça seja ajustada em um orifício. Centralizar a peça no furo geralmente requer um pouco de “conformidade” para encontrar o ponto central - um pouco de movimento ou um pouco de “flexão”. Então, a força de inserção, movendo-se para baixo, precisa ser firme e rígida.
Os robôs SCARA são menos rígidos do que os robôs cartesianos e também estão limitados ao peso que podem levantar, em comparação com o robô cartesiano que pode levantar objetos bastante pesados. Os robôs SCARA ocupam uma área pequena e geralmente são usados para aplicações nas quais as distâncias a serem movidas são relativamente pequenas. Eles têm menos graus de liberdade do que os braços articulados. Por outro lado, eles têm um alto grau de precisão e são bastante repetíveis. E são mais baratos do que um braço articulado.
O envelope de trabalho de um robô SCARA é cilíndrico, o que também é uma consideração ao considerar a aplicação. Os robôs SCARA são geralmente mais rápidos do que os braços articulados, embora não tão rápidos quanto os robôs Delta.
Robôs polares ou esféricos
Vantagens: Sistema de controle mais simples do que o braço articulado. Pode ter longo alcance. Muito bom para muitas aplicações de soldagem. Pode ser mais rápido que o braço articulado.
Desvantagens: Não é tão flexível quanto os braços articulados do robô. Tecnologia mais antiga. Freqüentemente, precisa de uma pegada bastante grande. Não tão rápido quanto os braços Delta.
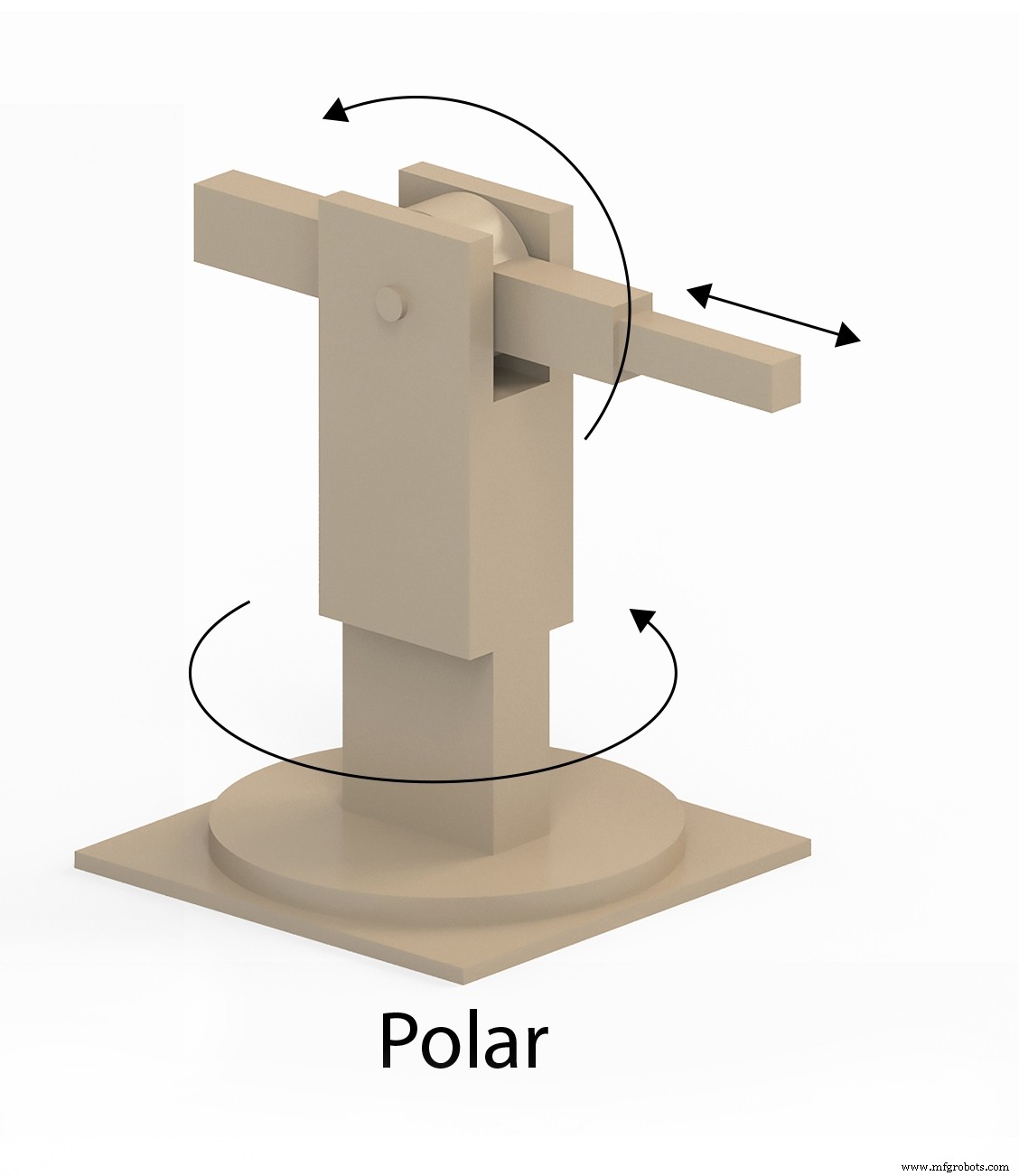
Os robôs polares (às vezes chamados de robôs esféricos) apresentam uma combinação de duas juntas rotacionais e uma junta linear. Seu design cria um espaço de trabalho em formato esférico.
Fato interessante: O primeiro robô industrial (criado na década de 1950), denominado “Unimate”, era um robô esférico.
Os robôs polares podem ser usados para moldagem por injeção, pintura, soldagem a arco e soldagem a ponto. Eles podem ter um longo alcance quando equipados com um braço linear de tamanho adequado.
Os robôs polares são uma tecnologia mais antiga e podem ser substituídos por robôs de braço articulado (que também têm um envelope de trabalho esférico), embora em algumas aplicações o robô polar possa ainda ser mais econômico do que suas alternativas.
robôs Delta
Vantagens: O design mais rápido de braços de robô para operações de pick and place. Leve. Preciso.
Desvantagens: Limitado a objetos relativamente pequenos e leves. Não é adequado para trabalhar em objetos em um plano vertical. Alcance limitado.
Robôs delta (também chamados de robôs paralelos) têm três braços robóticos em forma de paralelogramos. Normalmente, o robô delta está localizado acima das peças de trabalho, preso a um cavalete suspenso. Como todos os motores estão na base, as articulações e os braços do robô são muito leves em comparação com outros robôs. O robô Delta tem um envelope de trabalho em forma de cúpula de cabeça para baixo.
Fato interessante: O robô Delta foi originalmente projetado para permitir que um fabricante de chocolate pegasse pedaços de chocolate e os colocasse em uma caixa.

O design do robô Delta resulta em uma operação precisa e de alta velocidade. Os robôs Delta são usados principalmente em aplicações pick and place. Aplicações adicionais incluem aplicação de adesivo, soldagem e montagem. Os robôs Delta não podem transportar cargas úteis pesadas e isso limita os tipos de ferramentas de fim de braço (EoAT) e as tarefas que eles podem realizar.
Projetos híbridos de robôs Delta às vezes colocam juntas rotativas nas extremidades dos braços para aumentar a flexibilidade de seu movimento.
Robôs cilíndricos
Vantagens: Rígido. Preciso. Perfeito em aplicações que requerem geometria circular.
Desvantagens: Tecnologia mais antiga. Flexibilidade limitada de movimento.
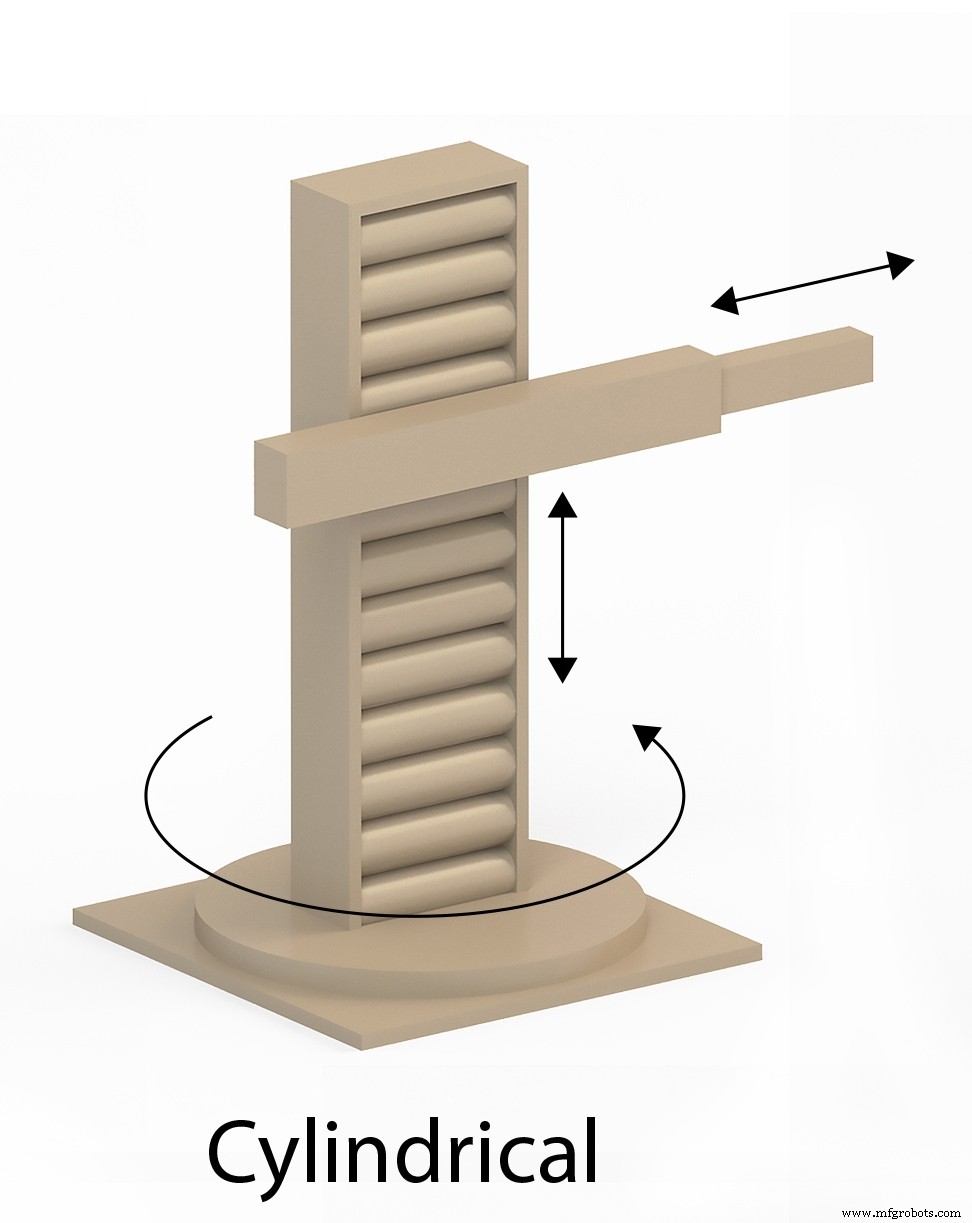
Robôs cilíndricos ter pelo menos uma junta rotativa na base e duas juntas lineares. Este projeto leva a um espaço de trabalho de forma cilíndrica.
Os robôs cilíndricos são normalmente usados em espaços de trabalho apertados e são um ajuste perfeito para objetos que precisam ter uma simetria circular (por exemplo, fios, tubos). As aplicações de retificação, montagem e soldagem a ponto usam robôs cilíndricos.
Robôs colaborativos (cobots)
Vantagens: É seguro trabalhar ao lado de outras pessoas. Interfaces modernas permitem “ensinar” ao braço do robô o que fazer sem escrever código.
Desvantagens: Nem sempre é o tipo de braço robótico mais rápido. Limitada em força e velocidade.
Os robôs colaborativos (cobots) permitem a interação humano-robô em um ambiente de trabalho seguro, sem a necessidade de cercas ou outras medidas de segurança tomadas em aplicações tradicionais de robôs industriais. No entanto, as medidas de segurança levam a uma redução na velocidade de operação.

Além de ser seguro operar ao lado de humanos, uma das características que tornam os cobots mais colaborativos é a capacidade de um operador ensinar ao braço do robô os movimentos a fazer sem ter que escrever um código de programação. O operador segura o braço do robô e o move fisicamente da maneira que o robô precisa ir. O braço do robô pode então replicar o movimento demonstrado.
Um cobot padrão normalmente não é projetado para manusear objetos muito pesados. Isso cria uma limitação na gama de produtos que ele pode gerenciar.
Os robôs colaborativos têm uma ampla gama de aplicações, como manutenção de máquinas, coleta e colocação, montagem, soldagem a arco, mas geralmente não são adequados para aplicações pesadas ou tarefas de alta velocidade.
Robôs móveis autônomos

AMRs ou robôs móveis autônomos representam um segmento de rápido crescimento do mercado de robôs industriais. Eles vêm em várias formas e tamanhos, otimizados para as tarefas para as quais foram projetados.
Carrinhos com rodas
AMRs na forma de carrinhos ou veículos com rodas são normalmente usados para transportar mercadorias dentro de uma fábrica ou depósito. Eles são equipados com sensores, poder de computação a bordo e motores elétricos que permitem que eles se movam por uma instalação e criem um mapa interno dela. Isso geralmente é feito com uma pessoa seguindo o AMR, guiando-o por controle remoto.
Depois de criar um mapa interno, o AMR pode ser instruído sobre os destinos para os quais precisa viajar. Uma característica fundamental dos AMRs é que eles podem viajar de forma independente (“autônoma”) de um lugar para outro, evitando obstáculos ao longo do caminho. Se uma pessoa, empilhadeira ou outro objeto estiver bloqueando seu caminho, eles podem desviar para evitar o obstáculo ou até mesmo planejar uma rota inteiramente nova para seu destino.
As capacidades autônomas dos AMRs os tornam muito flexíveis em comparação a um sistema de transporte.
AMRs na forma de carrinhos com rodas podem ser usados individualmente para transportar mercadorias e também podem ser usados como parte de um enxame ou frota de robôs. Frotas de AMRs são usadas pela Amazon, por exemplo. A Amazon usa o que é chamado de configuração “mercadoria para pessoa”, na qual cada robô pega uma prateleira inteira de produtos e a leva para uma pessoa em uma estação de coleta de pedidos. A pessoa então pega o (s) produto (s) da prateleira e os coloca em um contêiner para atendimento de pedidos de e-commerce.
Recentemente, avanços em visão computacional, inteligência artificial e tecnologia de garras tornaram possível substituir a pessoa na estação de coleta por um braço robótico articulado. Nesse caso, o carrinho AMR traz a mercadoria para o braço do robô, para uma colaboração robô-para-robô.
Veículos guiados autonomamente (AGV)
Os AGVs geralmente têm a forma de um veículo com rodas e são uma tecnologia mais antiga que os AMRs. Eles têm menos inteligência a bordo e, conseqüentemente, não são tão autônomos quanto os AMRs. Os AGVs não têm a capacidade de fazer um mapa de uma instalação. Em vez disso, eles contam com caminhos traçados para eles. Os caminhos são definidos por fios colocados no chão, ou fita especial ou outros tipos de guias. Se um AGV encontrar obstáculos em seu caminho, ele só pode parar e pedir ajuda.
No entanto, as distinções entre AGVs e AMRs estão se tornando cada vez mais confusas. Os AGVs estão recebendo mais poder de computação integrado e alguns agora têm a capacidade de contornar os obstáculos em seu caminho.
AMRs com braços robóticos
Um braço robótico pode ser montado no topo de um AMR de carrinho com rodas. Isso aumenta a flexibilidade do robô e a variedade de tarefas que ele pode realizar. Uma aplicação é usar esse robô para cuidar de uma fileira inteira de máquinas-ferramentas. O robô pode descarregar uma peça acabada e carregar uma nova peça bruta em uma máquina e, em seguida, mover-se para baixo na linha e repetir as operações para uma série de máquinas.
Robôs com pernas
Milhões de pessoas viram o vídeo no YouTube de robôs dançantes feitos pela Boston Dynamics e, portanto, viram robôs de duas e quatro patas. Um uso industrial para robôs com pernas prevê implantá-los para entrega de pacotes. Outro caso de uso é para operações de busca e resgate.
Usar pernas em vez de rodas tem certas vantagens. As pernas permitem ao robô viajar por alguns tipos de terreno que carrinhos com rodas achariam difícil ou impossível. As pernas tornam possível subir escadas e entrar e sair de um veículo com mais facilidade do que um carrinho com rodas.
AMRs esféricos
Robôs móveis autônomos na forma de uma esfera estão disponíveis comercialmente e têm vantagens especiais sobre outros fatores de forma. Os componentes do sistema do AMR esférico são selados dentro de um invólucro durável. Isso os torna capazes de operar em ambientes hostis. Eles também podem flutuar e viajar sobre a água. AMRs esféricos podem ser anfíbios, viajando tanto na superfície da água quanto na terra.
O sistema de propulsão de um AMR esférico é mais comumente baseado na mudança do centro de gravidade.
As aplicações industriais para AMRs esféricos são principalmente em vigilância e inspeção remota. Equipados com câmeras e comunicação, eles podem transmitir o vídeo de volta ao operador remoto. Para ambientes hostis que podem ter gás tóxico ou outras condições perigosas, um AMR esférico pode ser ideal.
Robôs voadores (drones aéreos)
Os veículos aéreos não tripulados (UAVs) ou drones estão sendo cada vez mais usados para diversos fins industriais. Uma aplicação é usar drones em depósitos para fazer o inventário. O drone pode voar pelos corredores do depósito e usar a visão computacional para contar o número de itens em caixas nas prateleiras.

Dependendo de seu desenho, um drone industrial pode ser uma espécie de Robô Móvel Autônomo (AMR), já que alguns modelos podem detectar automaticamente os obstáculos e evitá-los, navegando de forma independente até o destino. Alguns drones industriais podem receber uma “missão”, que pode consistir em sobrevoar uma operação de mineração a céu aberto ou um projeto de infraestrutura. O drone voa sua missão de forma autônoma e pode gravar vídeo do projeto, ou fazer certas medições e gravá-las. Esses drones podem ser usados para monitorar o andamento dos projetos de construção.
A Amazon e outras empresas já estão fazendo uso limitado de drones para a entrega de bens duráveis e mantimentos.
Robôs subaquáticos

Existe uma grande variedade de robôs projetados para serem usados embaixo d'água. Alguns robôs subaquáticos são projetados para serem autônomos (Autonomous Underwater Vehicles - UAVs), e alguns são feitos para serem controlados remotamente, seja sem fio ou com uma corda com fio. Alguns robôs subaquáticos usam hélices como sistema de propulsão, semelhante aos submarinos. Por outro lado, muitos desses robôs imitam a ação de criaturas vivas para sua propulsão. Alguns imitam a ação dos golfinhos, outros imitam cobras e ainda outros se movem como peixes. Imitar a natureza dessa forma é chamado de “biomimética” porque a ação do robô imita criaturas biológicas.
Os robôs subaquáticos podem ser usados para inspeção de plataformas de petróleo offshore, oleodutos e para pesquisa científica. Outras aplicações envolvem o uso de robôs subaquáticos para inspecionar o fundo de pontes, inspecionar entradas de barragens hidrelétricas e inspecionar recifes de coral.
Robôs subaquáticos estão sendo usados por departamentos de polícia para fazer gravações de vídeo do fundo de corpos d'água em busca de evidências. Os militares também estão interessados em robôs subaquáticos. Um sistema de sonar poderia dizer a diferença entre um “golfinho” robótico e um real?
As vantagens dos robôs subaquáticos são muitas. Esses robôs significam que não é necessário incorrer nos riscos e despesas de mergulhadores humanos. Os robôs podem ficar submersos por mais tempo do que as pessoas. Equipar robôs subaquáticos com sensores permite-lhes medir e registrar um número quase infinito e tipos de propriedades
How to source the ideal robot type for your organization
HowToRobot is a global platform helping companies to succeed with automation. By using the HowToRobot worldwide directory of over 15,000 robotics companies, you can find the type of robot you need, ideally suited for your application.
If you already know what type of robot you need, and want to get more information from robotics vendors, you can get quotes and receive product information and pricing from multiple vendors through HowToRobot.
If you are not sure what kind of robotic component or part you need and would like to simply describe your application and some of your Key Performance Indicators (KPIs) and goals you’d like to achieve through automation, you can submit a Request for Information and receive responses from vendors who can supply you information about their solutions.
Please note there are impartial HowToRobot experts who can help you navigate through the process. Click here to set up a consultation with an expert advisor.
Aqui está a principal coisa que faz com que os projetos de robôs falhem ou tenham sucesso
Soldagem robótica:como os robôs podem ajudar a automatizar as tarefas de soldagem
Robô industrial
- Diferentes tipos de escadas industriais e suas aplicações
- Tipos de guindastes EOT e seus usos
- Diferentes graus de alumínio e bronze e seus usos
- 5 ligas metálicas industriais importantes e seus usos
- Diferentes tipos de socos e seus usos
- Quais são os diferentes tipos de socos e seus usos
- Entendendo os diferentes tipos de ferramentas de perfuração e seus principais usos
- Diferentes tipos de metais não ferrosos e seus usos
- Diferentes tipos de fundição e suas aplicações
- Diferentes tipos de torno mecânico e sua classificação