


Motores Síncronos
Motores Síncronos Monofásicos
Os motores síncronos monofásicos estão disponíveis em tamanhos pequenos para aplicações que requerem temporização precisa, como cronometragem (relógios) e reprodutores de fita. Embora relógios regulados a quartzo alimentados por bateria estejam amplamente disponíveis, a variedade operada por linha CA tem melhor precisão de longo prazo - por um período de meses.
Isso se deve ao fato de os operadores da usina manterem propositalmente a precisão de longo prazo da frequência do sistema de distribuição de CA. Se atrasar alguns ciclos, eles compensarão os ciclos perdidos de CA de forma que os relógios não perderão tempo.
Motores síncronos grandes vs. pequenos
Acima de 10 cavalos de potência (10 kW), a maior eficiência e o principal fator de potência tornam os grandes motores síncronos úteis na indústria. Os motores síncronos grandes são um pouco mais eficientes do que os motores de indução mais comuns, embora o motor síncrono seja mais complexo.
Visto que motores e geradores são semelhantes em construção, deve ser possível usar um gerador como motor e, inversamente, usar um motor como gerador.
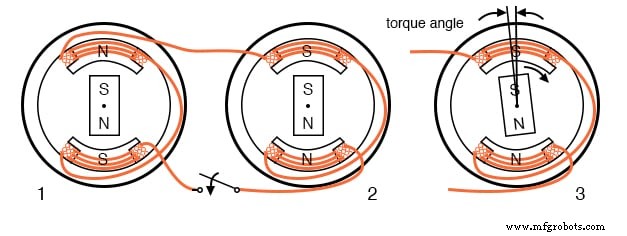
Um motor assíncrono é semelhante a um alternador com um campo rotativo. A figura abaixo mostra pequenos alternadores com um campo giratório de ímã permanente. A figura abaixo pode ser dois alternadores paralelos e sincronizados acionados por fontes de energia mecânica ou um alternador acionando um motor síncrono. Ou podem ser dois motores, se uma fonte de alimentação externa estiver conectada.
O ponto é que em ambos os casos os rotores devem funcionar na mesma frequência nominal e estar em fase um com o outro. Ou seja, eles devem ser sincronizados . O procedimento para sincronizar dois alternadores é (1) abrir a chave, (2) acionar ambos os alternadores na mesma taxa de rotação, (3) avançar ou retardar a fase de uma unidade até que ambas as saídas CA estejam em fase, (4) fechar a mudança antes que eles saiam de fase.
Uma vez sincronizados, os alternadores serão travados entre si, exigindo um torque considerável para separar uma unidade (fora de sincronização) da outra.
Motor síncrono funcionando em compasso com o alternador
Contabilização de torque com motores síncronos
Se mais torque na direção de rotação for aplicado ao rotor de um dos alternadores rotativos acima, o ângulo do rotor avançará (oposto de (3)) em relação ao campo magnético nas bobinas do estator enquanto ainda sincronizado e o o rotor fornecerá energia para a linha CA como um alternador.
O rotor também será avançado em relação ao rotor do outro alternador. Se uma carga como um freio for aplicada a uma das unidades acima, o ângulo do rotor irá atrasar o campo do estator como em (3), extraindo energia da linha CA, como um motor.
Se torque ou arrasto excessivo for aplicado, o rotor excederá o ângulo de torque máximo avançando ou atrasando tanto que a sincronização é perdida. O torque é desenvolvido apenas quando a sincronização do motor é mantida.
Aumentando a velocidade dos motores síncronos
No caso de um pequeno motor síncrono no lugar do alternador, não é necessário passar pelo elaborado procedimento de sincronização para alternadores. No entanto, o motor síncrono não dá partida automática e ainda deve ser levado à velocidade elétrica do alternador aproximada antes de travar (sincronizar) com a taxa de rotação do gerador.
Quando atingir a velocidade, o motor síncrono manterá o sincronismo com a fonte de alimentação CA e desenvolverá o torque.
Sinewave aciona motor síncrono
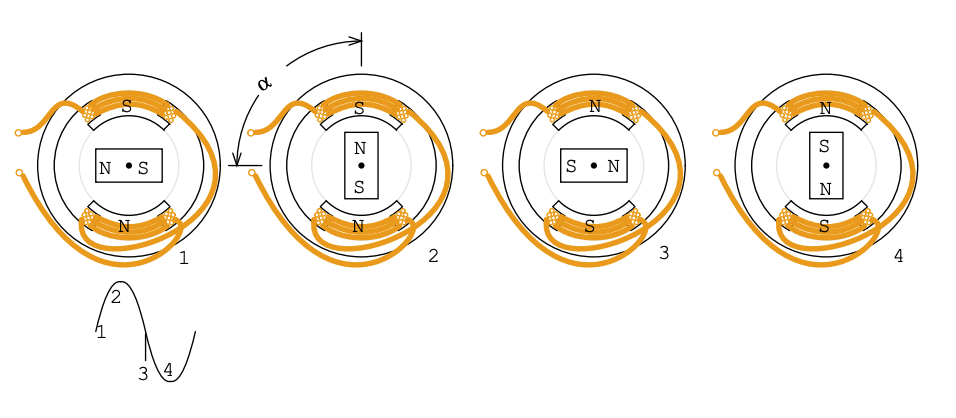
Assumindo que o motor está em velocidade síncrona, conforme a onda senoidal muda para positiva na Figura acima (1), a bobina norte inferior empurra o pólo do rotor norte, enquanto a bobina sul superior atrai esse pólo norte do rotor. De maneira semelhante, o pólo sul do rotor é repelido pela bobina sul superior e atraído pela bobina norte inferior.
No momento em que a onda senoidal atinge um pico em (2), o torque que mantém o pólo norte do rotor para cima está no máximo. Este torque diminui conforme a onda senoidal diminui para 0 VCC em (3) com o torque no mínimo.
Conforme a onda senoidal muda para negativa entre (3 e 4), a bobina sul inferior empurra o pólo sul do rotor, enquanto atrai o pólo norte do rotor. De maneira semelhante, o pólo do rotor norte é repelido pela bobina norte superior e atraído pela bobina sul inferior. Em (4), a onda senoidal atinge um pico negativo com o torque de retenção novamente no máximo. Conforme a onda senoidal muda de negativo para 0 VCC para positivo, o processo se repete para um novo ciclo de onda senoidal.
Observe que a figura acima ilustra a posição do rotor para uma condição sem carga (α =0 °). Na prática real, carregar o rotor fará com que ele fique atrasado nas posições mostradas pelo ângulo α. Este ângulo aumenta com o carregamento até que o torque máximo do motor seja alcançado em α =90 °.
A sincronização e o torque são perdidos além deste ângulo. A corrente nas bobinas de um motor síncrono monofásico pulsa enquanto alterna a polaridade.
Se a velocidade do rotor do ímã permanente estiver próxima da frequência dessa alternância, ele se sincroniza com essa alternância. Como o campo da bobina pulsa e não gira, é necessário aumentar a velocidade do rotor de ímã permanente com um motor auxiliar. Este é um pequeno motor de indução semelhante aos da próxima seção.
A adição de postes de campo diminui a velocidade
Um alternador de 2 pólos (par de pólos N-S) irá gerar uma onda senoidal de 60 Hz quando girado a 3600 rpm (rotações por minuto). O 3600 rpm corresponde a 60 rotações por segundo. Um motor síncrono de ímã permanente de 2 pólos semelhante também girará a 3600 rpm.
Um motor de velocidade mais baixa pode ser construído adicionando mais pares de pólos. Um motor de 4 pólos giraria a 1800 rpm, um motor de 12 pólos a 600 rpm. O estilo de construção mostrado (Figura acima) é apenas ilustrativo. Motores síncronos de estator multipolares com maior eficiência e maior torque, na verdade, têm vários pólos no rotor.

Motor síncrono de 12 polos de um enrolamento
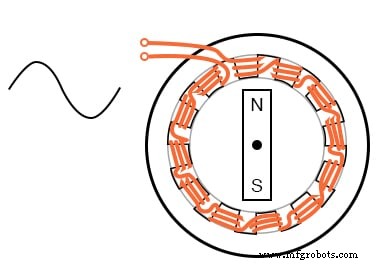
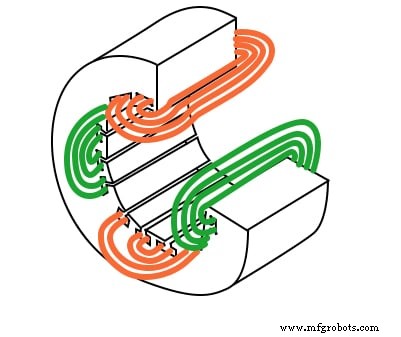
Em vez de enrolar 12 bobinas para um motor de 12 pólos, enrole uma única bobina com doze peças de pólos de aço interdigitadas, conforme mostrado na Figura acima. Embora a polaridade da bobina alterne devido à CA aplicada, suponha que a parte superior esteja temporariamente ao norte e a parte inferior ao sul.
As peças do pólo direcionam o fluxo sul da parte inferior e de fora da bobina para o topo. Esses 6-sul são intercalados com guias 6-norte dobradas para cima a partir do topo da peça polar de aço da bobina. Assim, uma barra de rotor de ímã permanente encontrará pares de 6 pólos correspondendo a 6 ciclos de CA em uma rotação física da barra de ímã.
A velocidade de rotação será 1/6 da velocidade elétrica do AC. A velocidade do rotor será 1/6 daquela experimentada com um motor síncrono de 2 pólos. Exemplo:60 Hz giraria um motor de 2 polos a 3600 rpm ou 600 rpm para um motor de 12 polos.
Reproduzido com permissão da Westclox History em www.clockHistory.com
O estator (Figura acima) mostra um motor de relógio síncrono Westclox de 12 pólos. A construção é semelhante à figura anterior com uma única bobina. O estilo de construção de uma bobina é econômico para motores de baixo torque. Este motor de 600 rpm aciona engrenagens de redução que movem os ponteiros do relógio.
Q: Se o motor Westclox funcionasse a 600 rpm de uma fonte de alimentação de 50 Hz, quantos pólos seriam necessários?
A: Um motor de 10 polos teria 5 pares de polos N-S. Ele giraria a 50/5 =10 rotações por segundo ou 600 rpm (10 s-1 x 60 s / minuto).

Reproduzido com permissão da Westclox History em www.clockHistory.com
O rotor (Figura acima) consiste em uma barra de ímã permanente e um copo de motor de indução de aço. A barra do motor síncrono girando dentro das guias do pólo mantém o tempo preciso. O copo do motor de indução fora do ímã da barra se encaixa fora e sobre as guias para autoinicialização. Ao mesmo tempo, foram fabricados motores sem partida automática sem a capa do motor de indução.
Motores síncronos trifásicos
Um motor síncrono trifásico, conforme mostrado na figura abaixo, gera um campo eletricamente rotativo no estator. Esses motores não dão partida automática se forem iniciados a partir de uma fonte de alimentação de frequência fixa, como 50 ou 60 Hz, como encontrado em um ambiente industrial.
Além disso, o rotor não é um ímã permanente para os motores de vários cavalos de força (vários quilowatts) usados na indústria, mas um eletroímã. Grandes motores síncronos industriais são mais eficientes do que motores de indução. Eles são usados quando a velocidade constante é necessária. Tendo um fator de potência líder, eles podem corrigir a linha CA para um fator de potência atrasado.
As três fases de excitação do estator são adicionadas vetorialmente para produzir um único campo magnético resultante que gira f / 2n vezes por segundo, onde f é a frequência da linha de energia, 50 ou 60 Hz para motores operados por linha de energia industrial. O número de pólos é n. Para velocidade do rotor em rpm, multiplique por 60.
S =f120 / n onde:S =velocidade do rotor em rpm f =frequência da linha CA n =número de pólos por fase
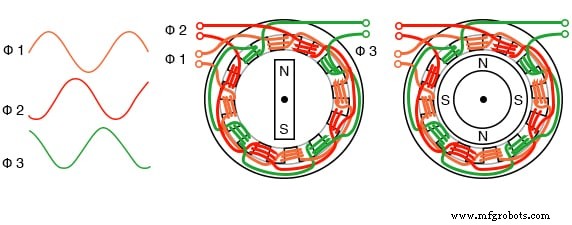
O motor síncrono trifásico de 4 pólos (por fase) girará a 1800 rpm com potência de 60 Hz ou 1500 rpm com potência de 50 Hz. Se as bobinas forem energizadas uma de cada vez na sequência φ-1, φ-2, φ-3, o rotor deve apontar para os pólos correspondentes.
Como as ondas senoidais realmente se sobrepõem, o campo resultante girará, não em etapas, mas suavemente. Por exemplo, quando as ondas senoidais φ-1 e φ-2 coincidem, o campo estará em um pico apontando entre esses pólos. O rotor de barra magnética mostrado é apropriado apenas para motores pequenos.
O rotor com múltiplos pólos magnéticos (abaixo à direita) é usado em qualquer motor eficiente que conduza uma carga substancial. Estes serão eletroímãs alimentados por anel deslizante em grandes motores industriais. Grandes motores síncronos industriais são autoiniciados por condutores em gaiola de esquilo embutidos na armadura, atuando como um motor de indução.
A armadura eletromagnética só é energizada depois que o rotor é colocado perto da velocidade síncrona.
Motor síncrono trifásico de 4 pólos
Pequenos motores síncronos multifásicos
Pequenos motores síncronos multifásicos podem ser iniciados aumentando a frequência do inversor de zero até a frequência final de operação. Os sinais de acionamento multifásico são gerados por circuitos eletrônicos e serão ondas quadradas em todas as aplicações, exceto nas mais exigentes.
Esses motores são conhecidos como motores DC sem escova. Os verdadeiros motores síncronos são acionados por formas de onda sinusoidais. O acionamento bifásico ou trifásico pode ser usado fornecendo o número apropriado de enrolamentos no estator. Apenas trifásico é mostrado acima.
Motor eletrônico síncrono
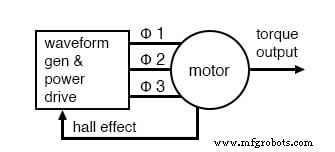
O diagrama de blocos mostra a eletrônica do inversor associada a um motor síncrono de baixa tensão (12 V DC). Esses motores têm um sensor de posição integrado dentro do motor, que fornece um sinal de baixo nível com uma frequência proporcional à velocidade de rotação do motor.
O sensor de posição pode ser tão simples quanto sensores de campo magnético de estado sólido, como efeito Hall dispositivos que fornecem temporização de comutação (direção da corrente de armadura) para os componentes eletrônicos da unidade. O sensor de posição pode ser um sensor angular de alta resolução, como um resolver, um inductosyn (codificador magnético) ou um codificador óptico.
Se a velocidade de rotação constante e precisa for necessária, (como para uma unidade de disco) um tacômetro e loop de bloqueio de fase podem ser incluídos (figura abaixo). Esse sinal do tacômetro, um trem de pulso proporcional à velocidade do motor, é realimentado em um loop de fase travada, que compara a frequência e a fase do tacômetro com uma fonte de frequência de referência estável, como um oscilador de cristal.
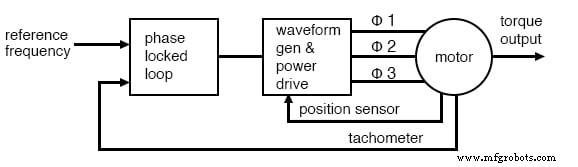
Loop de bloqueio de fase controla a velocidade do motor síncrono
Motor DC sem escova
Um motor movido por ondas quadradas de corrente, conforme fornecido por sensores de efeito Hall simples, é conhecido como um motor DC sem escova . Este tipo de motor tem maior torque de ondulação variação através de uma revolução do eixo do que uma onda senoidal é acionada pelo motor. Isso não é um problema para muitos aplicativos. Porém, estamos principalmente interessados em motores síncronos nesta seção.
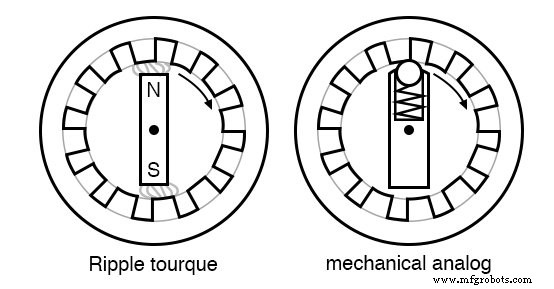
Torque de ondulação do motor e analógico mecânico
O torque ondulado, ou cogging, é causado pela atração magnética dos pólos do rotor nas peças polares do estator. (Figura acima) Observe que não há bobinas do estator. O rotor PM pode ser girado manualmente, mas encontrará atração nas peças polares quando estiver próximo a elas.
Isso é análogo à situação mecânica. O torque de ondulação seria um problema para um motor usado em um toca-fitas? Sim, não queremos que o motor acelere e desacelere alternadamente à medida que passa a fita cassete pelo cabeçote de reprodução da fita. O torque de ondulação seria um problema para um motor de ventilador? Não.
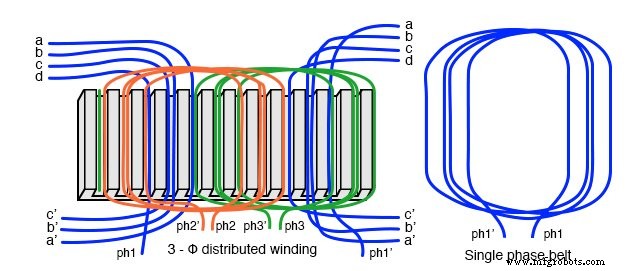
Enrolamentos distribuídos em uma correia produzem um campo mais senoidal
Se um motor é acionado por ondas senoidais de corrente síncrona com a fem de retorno do motor, ele é classificado como um motor CA síncrono, independentemente de as formas de onda de acionamento serem geradas por meios eletrônicos. Um motor síncrono irá gerar uma volta sinusoidal emf se o campo magnético do estator tem uma distribuição senoidal.
Será mais sinusoidal se os enrolamentos do pólo forem distribuídos em uma correia por muitas ranhuras, em vez de concentrados em um grande pólo (como desenhado na maioria de nossas ilustrações simplificadas). Este arranjo cancela muitos dos harmônicos ímpares do campo do estator.
Os slots com menos enrolamentos na borda do enrolamento de fase podem compartilhar o espaço com outras fases. As correias de enrolamento podem assumir uma forma concêntrica alternativa, conforme mostrado na Figura abaixo.
Correias concêntricas
Para um motor de 2 fases, acionado por uma onda senoidal, o torque é constante ao longo de uma revolução pela identidade trigonométrica:
sen2θ + cos2θ =1
A geração e sincronização da forma de onda do drive requerem uma indicação de posição do rotor mais precisa do que a fornecida pelos sensores de efeito Hall usados em motores DC sem escovas. Um resolvedor , ou codificador óptico ou magnético , fornece resolução de centenas a milhares de partes (pulsos) por revolução.
Um resolver fornece sinais analógicos de posição angular na forma de sinais proporcionais ao seno e co-seno do ângulo do eixo. Os codificadores fornecem uma indicação digital da posição angular no formato serial ou paralelo.
A unidade de onda senoidal pode, na verdade, ser de um PWM, Modulador de largura de pulso , um método de alta eficiência para aproximar uma onda senoidal com uma forma de onda digital. Cada fase requer uma unidade eletrônica para esta forma de onda com deslocamento de fase na quantidade apropriada por fase.
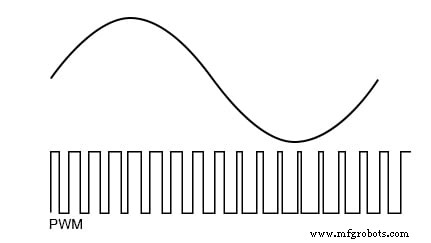
PWM aproxima uma onda senoidal
Benefícios do motor síncrono
A eficiência do motor síncrono é maior do que a dos motores de indução. Um motor síncrono também pode ser menor, especialmente se ímãs permanentes de alta energia forem usados no rotor. O advento da moderna eletrônica de estado sólido torna possível acionar esses motores em velocidade variável.
Os motores de indução são usados principalmente na tração ferroviária. No entanto, um pequeno motor síncrono, que é montado dentro de uma roda motriz, o torna atraente para tais aplicações. O supercondutor de alta temperatura A versão deste motor tem um quinto a um terço do peso de um motor de cobre enrolado.
O maior motor síncrono supercondutor experimental é capaz de dirigir um navio da classe destruidor naval. Em todas essas aplicações, o acionamento eletrônico de velocidade variável é essencial. O inversor de velocidade variável também deve reduzir a tensão do inversor em baixa velocidade devido à reatância indutiva diminuída em uma frequência mais baixa.
Para desenvolver o torque máximo, o rotor precisa atrasar a direção do campo do estator em 90 °. Mais, ele perde a sincronização. Muito menos resultados em torque reduzido. Assim, a posição do rotor precisa ser conhecida com precisão. E a posição do rotor em relação ao campo do estator precisa ser calculada e controlada.
Este tipo de controle é conhecido como controle de fase vetorial . É implementado com um microprocessador rápido acionando um modulador de largura de pulso para as fases do estator. O estator de um motor síncrono é o mesmo do motor de indução mais popular.
Como resultado, o controle de velocidade eletrônico de nível industrial usado com motores de indução também é aplicável a grandes motores síncronos industriais. Se o rotor e o estator de um motor síncrono rotativo convencional forem desenrolados, o resultado será um motor linear síncrono.
Este tipo de motor é aplicado ao posicionamento linear preciso de alta velocidade.
PLANILHA RELACIONADA:
- Planilha de teoria do motor CA
Tecnologia industrial
- Motores de indução monofásicos
- Motores do comutador CA
- Como solucionar problemas de motores de rotor enrolado
- Dica sobre motores elétricos:Minimize suas partidas
- Dica técnica:Motores
- Benefícios dos motores resfriados a líquido
- 7 etapas para garantir uma manutenção melhorada de motores elétricos
- Motores elétricos DC vs. AC:quais são suas diferenças?
- BLDC Motores e Automação
- Uma introdução ao motor BLDC