


Robô SnowPlow
Componentes e suprimentos
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 6 |
Sobre este projeto
Por que quis fazer um robô SnowPlow? Como não sou insensível a soluções para facilitar a vida, pensei em criar e propor uma solução que pudesse ajudar as pessoas a evitar o frio do inverno e o cansaço de usar a tradicional pá manual para remova a neve da passarela. Para isso, optei por algo divertido e tecnológico. Dessa forma resolvi começar a desenvolver um Snowplow Robot, controlado remotamente, com mecânica forte, controle eletrônico e potentes motores elétricos. O resultado é uma versão em miniatura de um limpa-neves real com lagartas, lâmina motorizada (que pode ser levantada e movida) e projetor montado em cima para iluminar o caminho no escuro. O robô pode ser controlado remotamente pelo controle remoto do PlayStation.
No vídeo a seguir você pode ver o robô removedor de neve em ação, alguém me disse que parece que para remover o robô removedor de neve deve assumir a aceleração, NÃO É ASSIM , Fiz o vídeo para mostrar como a neve é removida.
Como é feito?
O robô é composto por uma estrutura que suporta uma lâmina motorizada (que pode ser levantada e movida) e o sistema de tração composto por motores elétricos, rodas e lagartas. O chassi é realizado com barras de ferro de seção retangular soldadas entre si. O tamanho do robô é 600X375X240 mm, excluindo a lâmina, e seu peso é de cerca de 30 kg.
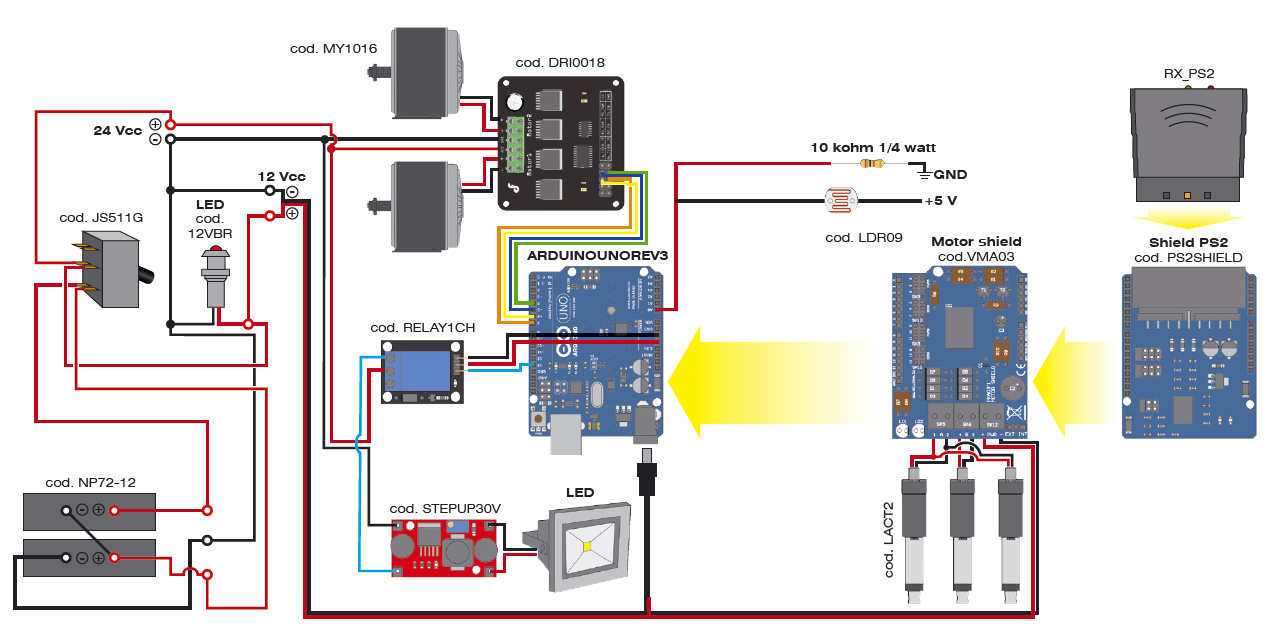

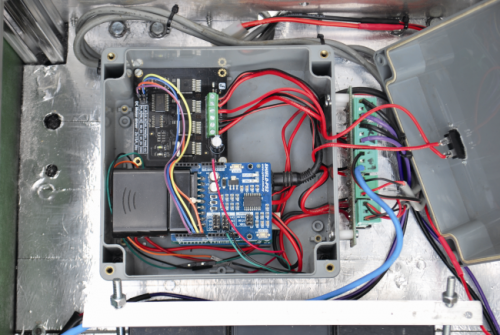
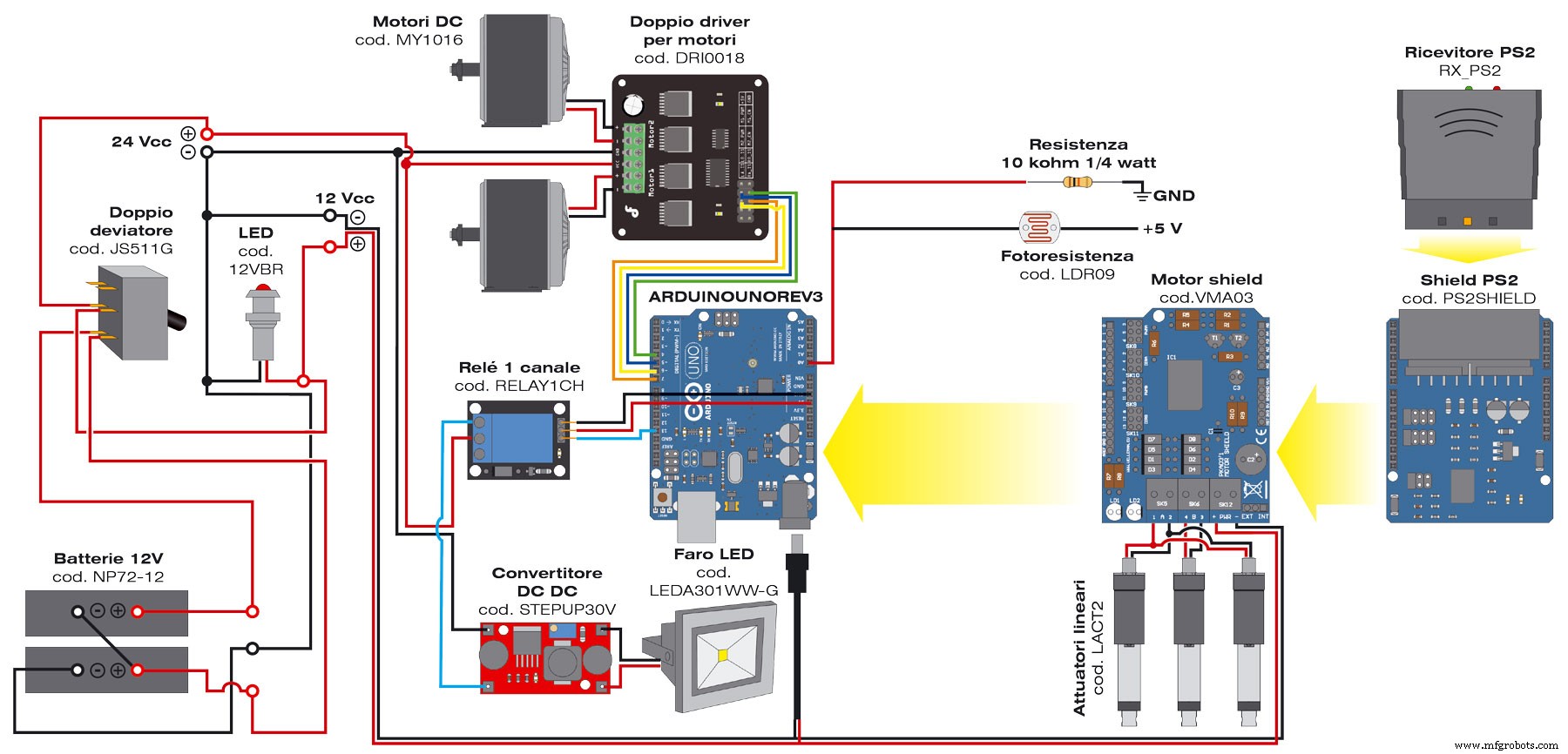
A parte elétrica e eletrônica do limpa-neve é baseada no Arduino Uno, hospedando três escudos e fazendo interface com:
- MOTOR DE MOTOR
- CANAL DA PLACA DE RELÉ
- conversor CC / CC avançado
A blindagem montada no Arduino é a blindagem do motor para controlar os três motores lineares que gerenciam o movimento da lâmina e o PS2SHIELD, que permite a interface com o PlayStation 2 (PS2); o último requer o RX-PS2, que é um receptor de rádio de 2,4 GHz para enviar / receber comandos específicos do console mencionado. O diagrama de fiação do robô é o que você encontra nestas páginas; a fonte de alimentação é feita por uma série de duas baterias de chumbo gel por 7,2 Ah:pegamos 12 V da conexão do ponto médio das duas, enquanto entre o negativo e o positivo da série pegamos 24 volts. Uma chave (125 V, 2 × 15 amperes) controla as duas linhas de alimentação. Com 12 volts, rodamos o Arduino, que alimentará os escudos por meio de sua pin-strip; um LED (montando internamente o resistor limitador) indicará quando o Arduino estiver em execução.
Os 12 volts diretamente da pilha de baterias também alimentam a seção de alimentação da blindagem do motor. Na verdade, como a absorção dos três atuadores lineares (cód. LACT2) é alta, não é aconselhável pegar os 12 V do Arduino:você opta que a fonte de alimentação externa seja fornecida ao terminal PWR apropriado. Para usar a fonte de alimentação externa, você deve mover o jumper (na blindagem) próximo ao terminal, entre a central e a EXT. O gerenciamento do escudo requer uma biblioteca especial para Arduino, fornecida com o componente. Cada atuador linear é composto por um motoredutor de 12 Vdc que utiliza um parafuso sem-fim para movimentar um eixo para frente e para trás ao longo de seu comprimento (excursão máxima de 5 cm).
O atuador tem carga dinâmica de 50 kg e velocidade máxima de 1,3 cm / s. É capaz de suportar até cerca de 250 kg, quando não está em movimento, e o torque garante a manutenção da posição do eixo mesmo na ausência de força. Duas chaves de limite fornecem ao motor para parar quando atinge a extensão e contração máximas, enquanto os diodos permitem a direção reversa após atingir o ponto limite. O atuador é feito de metal e é vedado para protegê-lo contra poeira e água (classificação IP63).
Passemos agora à linha de alimentação de 24 volts, que alimenta a parte de alimentação do limpa-neve, que são as seções de tração e projetor (opcional):a primeira é baseada no driver do motor, a ser conectada com quatro fios ao mesmo número de linhas digitais do Arduino. O acionador do motor é um acionador de energia de ponte dupla capaz de acionar dois motores com escova continuamente com uma tensão máxima de 35 VCC e uma corrente de 15 A (cada).
Fazendo interface com o Arduino e usando apenas quatro E / S digitais (2 PWM), você pode escolher a direção de rotação e a velocidade dos motores. O circuito possui quatro pinos de controle, quatro LEDs que indicam o sentido de rotação dos motores, dois pinos para alimentação da placa (5 Vdc) e dois dissipadores de alumínio localizados na parte traseira do circuito impresso, necessários para dissipar o calor gerado durante a operação na potência máxima.
Para o gerenciamento do driver pelo Arduino, o fabricante disponibiliza uma biblioteca especial. Os blocos de terminais de saída permitem que você conecte os dois motores, para serem conectados conforme indicado pelo diagrama (não inverta a polaridade, caso contrário, os trilhos rodarão no sentido inverso!) Usando cabos com uma seção de pelo menos 1,5 mm². Sobre as entradas de controle, deve-se respeitar a conexão entre o Arduino e o conector do controlador pitch 2,54; correspondência necessária ao usar a biblioteca fornecida pelo fabricante e nosso firmware:se você editá-los, terá que revisar as conexões.
Lembre-se de que DIR são os níveis lógicos para definir a direção de rotação dos motores e PWM são os sinais de PWM para comandar os drivers de energia. Para identificar os contatos do conector do controlador, é suficiente consultar a serigrafia visível ao lado dele no lado do componente da placa de circuito. Além do controlador do motor, os 24 volts irão alimentar a seção do projetor LED, você pode montar ou não; se montado, respeite a fiação indicada e lembre-se de tirar os 24 V positivos da placa do relé (cód. RELAY1CH). Este último aloja um relé e o respectivo transistor de drive controlado pelo Arduino por meio do Digital I / O 13; O Arduino também alimenta a placa, por meio do + 5V e do aterramento (GND).
Um relé permite ligar e desligar o projetor, direcionando a ação no circuito correspondente. O projetor é projetado para operar a 220 Vca, porém, como esta tensão não está disponível no robô, para evitar o uso de um inversor modificamos o projetor abrindo-o, retirando o AC / DC e trazendo os dois fios do LED de alimentação diretamente para a saída do conversor DC / DC (cód. STEPUP30V); o último é um conversor de chaveamento com tensão de saída ajustável, que deve ser sintonizado para fornecer ao LED uma corrente que o faça funcionar em torno de 10 watts. Normalmente, isso é alcançado em cerca de 30 volts. Porém lembre-se que a potência é dada pelo produto VxI, (corrente por tensão, em watts é obtido se V estiver em volts e I em amperes), então para 30 V, o consumo de corrente deve ser pouco abaixo de 340 mA. Embora o grupo de LEDs seja protegido internamente contra sobrecorrente, o STEPUP30V tem uma limitação da corrente de saída para 2A, portanto, pode ser útil substituí-lo por um DC / DC equipado com limite de corrente de saída.
O recebimento dos dados do controle remoto é tarefa do escudo PS2SHIELD, para o qual o fabricante disponibiliza a biblioteca específica. O escudo realiza o recebimento e decodificação do comando; a parte do rádio é deixada para o RX _PS2, que é inserido no conector relacionado. A última coisa a se notar é o fotorresistor, usado pelo Arduino para detectar a iluminação ambiente e controlar a placa RELAY1CH para que o projetor LED seja ligado; o componente é alimentado ao divisor de tensão por um resistor de 10 kOhm (1/4 W) e é lido da entrada analógica A0 Arduino. Os 5 volts são retirados do Arduino 5V. Este sensor de luz faz uma coisa simples:em boas condições de iluminação, a resistência do fotorresistor é baixa e a tensão lida pelo microcontrolador ADC do Arduino é baixa e não aciona a placa de relé; a escuridão, em vez disso, aumenta muito a resistência e o ADC lê uma voltagem próxima a 5 volts, o que faz com que o projetor seja ligado.
CONSTRUIR INSTRUÇÕES
GUIA RÁPIDO
Código
- Sketch
Sketch Arduino
https://cdn.hackaday.io/files/869403719640960/Vittorio_Snowplow_Robot.zip
Esquemas
Processo de manufatura