


Motor DC sem escova
Os motores DC sem escova foram desenvolvidos a partir de motores DC com escova convencionais com a disponibilidade de semicondutores de potência de estado sólido. Então, por que discutimos os motores CC sem escovas em um capítulo sobre motores CA?
Os motores CC sem escova são semelhantes aos motores síncronos CA. A principal diferença é que os motores síncronos desenvolvem uma volta sinusoidal EMF , em comparação com um retângulo, ou trapezoidal, EMF traseiro para motores DC sem escova.
Ambos têm campos magnéticos rotativos criados pelo estator, produzindo torque em um rotor magnético.
Os motores síncronos são geralmente grandes, com vários quilowatts, geralmente com rotores eletroímãs. Os motores síncronos verdadeiros são considerados uma velocidade única, um submúltiplo da frequência da linha de força. Os motores DC sem escova tendem a ser pequenos - alguns watts a dezenas de watts, com rotores de ímã permanente.
A velocidade de um motor DC sem escovas não é fixa, a menos que seja acionado por um loop bloqueado de fase ligado a uma frequência de referência. O estilo de construção é cilíndrico ou em forma de panqueca.
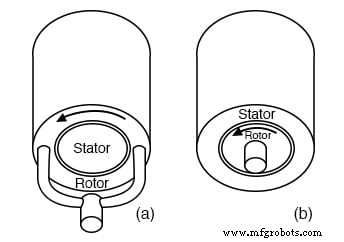
Construção cilíndrica:(a) rotor externo, (b) rotor interno
A construção mais usual, cilíndrica, pode assumir duas formas (figura acima). O estilo cilíndrico mais comum é com o rotor na parte interna, acima à direita. Este estilo de motor é usado em unidades de disco rígido. Também é possível colocar o rotor na parte externa em torno do estator.
É o caso dos motores de ventilador CC sem escova, sem eixo. Este estilo de construção pode ser curto e robusto. No entanto, a direção do fluxo magnético é radial em relação ao eixo de rotação.
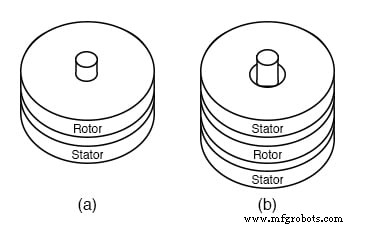
Construção do motor em forma de panqueca:(a) estator único, (b) estator duplo
Motores de panqueca de alto torque podem ter bobinas de estator em ambos os lados do rotor (figura acima-b).
As aplicações de menor torque, como motores de unidade de disquete, são suficientes com uma bobina de estator em um lado do rotor (Figura acima-a). A direção do fluxo magnético é axial, ou seja, paralela ao eixo de rotação.
A função de comutação pode ser realizada por vários sensores de posição do eixo:codificador óptico, um codificador magnético (resolver, sincro, etc.) ou sensores magnéticos de efeito Hall. Motores pequenos e baratos usam sensores de efeito Hall.
Um sensor de efeito Hall é um dispositivo semicondutor onde o fluxo de elétrons é afetado por um campo magnético perpendicular à direção do fluxo da corrente. Parece uma rede de resistor variável de quatro terminais. As tensões nas duas saídas são complementares.
A aplicação de um campo magnético ao sensor causa uma pequena mudança de voltagem na saída. A saída Hall pode conduzir um comparador para fornecer uma unidade mais estável para o dispositivo de alimentação. Ou, pode conduzir um estágio de transistor composto se polarizado corretamente.
Sensores de efeito Hall mais modernos podem conter um amplificador integrado e um circuito digital. Este dispositivo de 3 derivações pode conduzir diretamente o transistor de potência alimentando um enrolamento de fase. O sensor deve ser montado próximo ao rotor de ímã permanente para detectar sua posição.

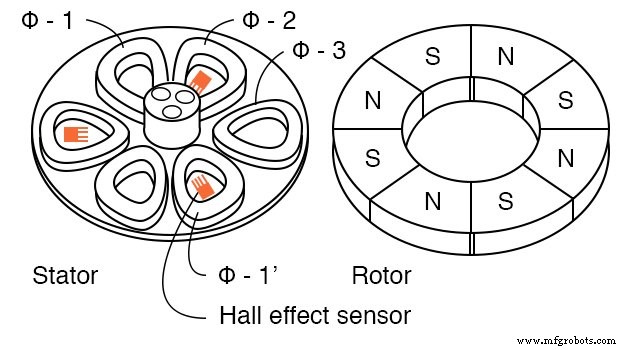
Sensores de efeito Hall comutam motor DC 3-φ brushless
O motor cilíndrico simples de 3 φ (figura acima) é comutado por um dispositivo de efeito Hall para cada uma das três fases do estator. A mudança de posição do rotor de ímã permanente é detectada pelo dispositivo Hall conforme a polaridade do pólo do rotor de passagem muda.
Este sinal Hall é amplificado para que as bobinas do estator sejam acionadas com a corrente adequada. Não mostrado aqui, os sinais Hall podem ser processados por lógica combinatória para formas de onda de acionamento mais eficientes.
O motor cilíndrico acima pode acionar um disco rígido se for equipado com um loop de bloqueio de fases (PLL) para manter uma velocidade constante. Um circuito semelhante pode acionar o motor da unidade de disquete Pancake (figura abaixo). Novamente, seria necessário um PLL para manter uma velocidade constante.
Motor de panqueca sem escova
O motor de panqueca de 3 φ tem pólos de 6 estator e pólos de 8 rotor. O rotor é um anel plano de ferrite magnetizado com oito pólos alternados magnetizados axialmente. Não mostramos que o rotor é coberto por uma placa de aço macio para montagem no rolamento no meio do estator.
A placa de aço também ajuda a completar o circuito magnético. Os pólos do estator também são montados sobre uma placa de aço, ajudando no fechamento do circuito magnético.
As bobinas planas do estator são trapezoidais para se ajustar melhor às bobinas e aproximar os pólos do rotor. As bobinas de 6 estator compreendem três fases de enrolamento.
Se as três fases do estator fossem energizadas sucessivamente, um campo magnético giratório seria gerado.
O rotor de ímã permanente seguiria como no caso de um motor síncrono. Um rotor bipolar seguiria este campo com a mesma taxa de rotação do campo rotativo. No entanto, nosso rotor de 8 pólos irá girar em um submúltiplo dessa taxa devido aos pólos extras no rotor.
O motor de ventilador DC sem escova tem estes recursos:

Motor de ventilador sem escova, 2-φ
- O estator tem 2 fases distribuídas entre 4 pólos
- Existem 4 pólos salientes sem enrolamentos para eliminar os pontos de torque zero.
- O rotor tem quatro pólos de transmissão principais.
- O rotor tem 8 pólos sobrepostos para ajudar a eliminar pontos de torque zero.
- Os sensores de efeito Hall são espaçados em 45º físicos.
- O alojamento do ventilador é colocado no topo do rotor, que é colocado sobre o estator.
O objetivo de um motor de ventilador sem escova é minimizar o custo de fabricação. Este é um incentivo para mover produtos de desempenho inferior de uma configuração 3-φ para uma configuração 2-φ. Dependendo de como é acionado, pode ser chamado de motor 4-φ.
Você deve se lembrar que os motores CC convencionais não podem ter um número par de pólos de armadura (2, 4, etc.) se eles forem de partida automática, 3, 5, 7 sendo comuns. Assim, é possível que um hipotético motor de 4 pólos pare com um torque mínimo, onde não pode ser iniciado a partir do repouso.
A adição dos quatro pequenos pólos salientes sem enrolamentos sobrepõe um torque de ondulação sobre a curva torque vs posição. Quando este torque de ondulação é adicionado à curva normal de torque energizado, o resultado é que os mínimos de torque são parcialmente removidos.
Isso possibilita a partida do motor em todas as posições de parada possíveis. A adição de oito pólos de ímã permanente ao rotor de ímã permanente de 4 pólos normal sobrepõe um pequeno torque de ondulação de segundo harmônico sobre o torque de ondulação de 4 pólos normal.
Isso remove ainda mais os mínimos de torque. Contanto que os mínimos de torque não caiam para zero, devemos ser capazes de dar partida no motor. Quanto mais sucesso tivermos na remoção dos mínimos de torque, mais fácil será a partida do motor.
O estator 2-φ requer que os sensores Hall sejam espaçados em 90 ° elétrico. Se o rotor fosse um rotor de 2 pólos, os sensores Hall seriam colocados 90 ° físico. Uma vez que temos um rotor de ímã permanente de 4 pólos, os sensores devem ser colocados a 45 ° físico para atingir 90 ° espaçamento elétrico. (Observe o espaçamento do Hall acima.)
A maior parte do torque é devido à interação das bobinas 2-φ internas do estator com a seção de 4 polos do rotor. Além disso, a seção de 4 pólos do rotor deve estar na parte inferior para que os sensores Hall detectem os sinais de comutação adequados.
A seção do rotor de 8 pólos serve apenas para melhorar a partida do motor.

Motor DC sem escova 2-φ push-pull drive
Na figura acima, o acionamento push-pull 2-φ (também conhecido como acionamento 4-φ) usa dois sensores de efeito Hall para acionar quatro enrolamentos. Os sensores são espaçados 90 ° distante elétrica, que é 90 ° físico para um rotor monopolar.
Como o sensor Hall tem duas saídas complementares, um sensor fornece comutação para dois enrolamentos opostos.
Tecnologia industrial
- Motores do comutador CA
- Nanotec:controlador de motor compacto para motores CC sem escovas e motores de passo
- Como solucionar problemas de motores de rotor enrolado
- Dica sobre motores elétricos:Minimize suas partidas
- Dica técnica:Motores
- Segurança do motor elétrico:diferentes fases e medidas de segurança
- 4 principais tipos de falhas de enrolamento em motores elétricos CA
- Sobre motores industriais e aplicações
- BLDC Motores e Automação
- Uma introdução ao motor BLDC