Evitar Obstáculos usando Inteligência Artificial
Componentes e suprimentos
 | | SparkFun Arduino Pro Mini 328 - 5 V / 16 MHz | | × | 1 | |
 | | Sensor ultrassônico - HC-SR04 (genérico) | | × | 1 | |
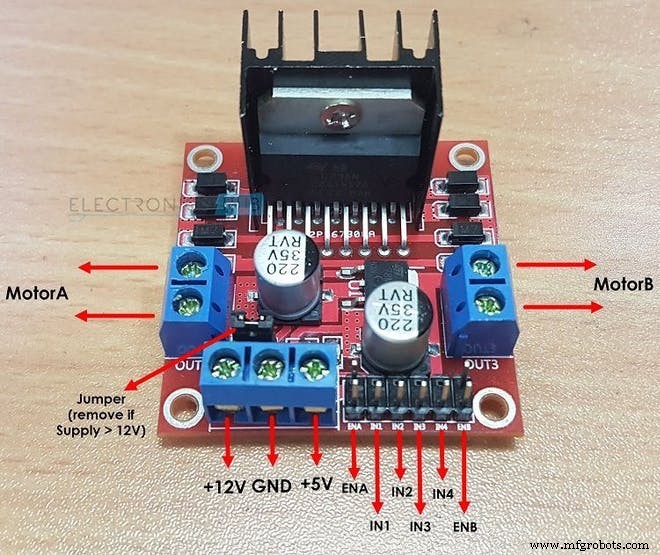
 | | Drivers de motor SparkFun Dual H-Bridge L298 | | × | 1 | |
| | | × | 2 | |
| | | × | 4 | |
 | | Fios de jumpers (genérico) | | × | 1 | |
 | | Tábua de ensaio com solda SparkFun - Mini | | × | 1 | |
 | | Bateria recarregável de íon de lítio | | × | 1 | |
 | | Bateria de 9 V (genérica) | | × | 1 | |
 | | × | 1 | |
 | | × | 1 | |
 | | Chaves C&K Chave da série JS | | × | 1 | |
Aplicativos e serviços online
Sobre este projeto
OBSTÁCULO EVITANDO ROBÔ USANDO IA / APRENDIZAGEM DE REFORÇO
Declaração do problema: O objetivo principal é aprender a evitar obstáculos em “N” episódios e aprender a ação ideal. Nesse caso, vamos supor que precisamos que nosso robô aprenda a ação ideal como 'Certa'.
Algoritmo de reforço usado: Aprendizagem Q
Como o L298N aciona dois motores CC:
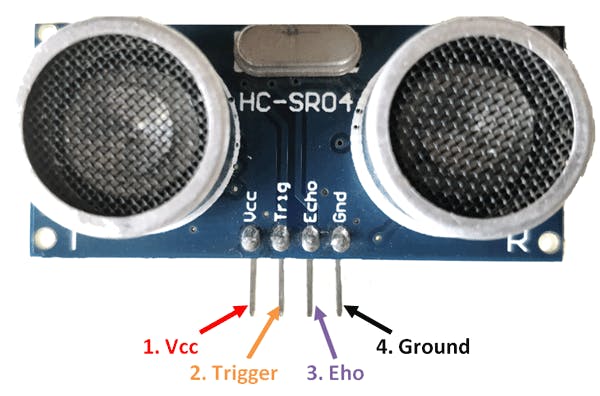
Como o sensor HC-SR04 calcula a distância:
Termos importantes na aprendizagem por reforço:
1 ESTADO: Esta é a situação em que se encontra o Robô. Aqui, para um robô básico para evitar obstáculos, há no total 2 estados ... o primeiro estado é quando não há obstáculo próximo a ele e o segundo estado em que há um obstáculo na frente dele. (Quando escrevi o código, assumi 10 diferentes os estados podem ser em que esperava a mesma ação. O motivo pelo qual fiz isso para ilustrar um ambiente mais complexo.)
2. AÇÃO: Em um determinado estado, o robô executa uma ação específica. Existem 4 ações que o robô pode realizar no 2º estado: “PARA FRENTE”, “PARA TRÁS”, “ESQUERDA”, “PARAR”. No primeiro estado, o robô pode realizar 4 ações, mas para tornar as coisas mais fáceis, assumi que o robô pode realizar apenas uma ação que é “AVANÇAR” ( Isso ocorre porque é ridículo considerar ações como ESQUERDA ou PARA TRÁS quando não há obstáculos por perto.
int ACTIONS =[0,1,2,3]
/ * AQUI:
0 =PARA A FRENTE
1 =PARA TRÁS
2 =PARAR
3 =DIREITO * /
3. PRÓXIMO ESTADO: Este é o estado em que o robô entra quando executa uma “AÇÃO” específica em seu atual “ESTADO”. Em obstáculo evitando o caso do robô, o PRÓXIMO ESTADO pode ser um “CRASH” estado ou um “SOBREVIVIDO” Estado. (Aqui, o estado SURVIVE é igual ao estado inicial em que o robô se encontra quando o episódio começa.)
/ * APÓS REALIZAR UMA AÇÃO, O ROBÔ VAI PARA O PRÓXIMO ESTADO NESTE CASO DE OBSTÁCULO
EVITANDO O ROBÔ * /
int NEXT_STATE;
int STATE =0;
NEXT_STATE =STATE + 1;
4. Q TABLE / Q MATRIX: Esta tabela é formada por Número de “ESTADOS” e Número de “AÇÕES”. No caso do robô para evitar obstáculos, esta tabela é dada por:
float Q [N_STATES] [NUMBER_OF_ACTIONS] ={{0.0,0.0,0.0,0.0},
{0.0,0.0,0.0,0.0},
{0.0,0.0,0.0 , 0.0},
{0.0,0.0,0.0,0.0},
{0.0,0.0,0.0,0.0},
{0.0,0.0,0.0,0.0},
{0.0,0.0,0.0,0.0},
{0.0,0.0,0.0,0.0},
{0.0,0.0,0.0,0.0},
{0.0,0.0,0.0,0.0 }};
Aqui N_STATES =10 AND N_ACTIONS =4. aqui "0.0" indica que qualquer ação pode ser realizada a partir de qualquer uma das 4 ações possíveis. se você, no entanto, deseja eliminar uma partícula ação em um estado apenas substitua "0,0" por "-1,0" na matriz. "-1.0" indica que a ação não pode ser executada nesse estado. aqui, presume-se que temos 10 estados diferentes, com cada estado esperando a mesma ação. se você quiser que seu robô aprenda ações que são diferentes em cada estado, altere as recompensas da matriz de recompensas no código
5. ESTADO TERMINAL: Este é o último estado em que o robô pode estar. Para o robô evitando obstáculos, este estado não existe, pois não temos nenhum estado terminal e queremos manter o aprendizado do nosso robô para sempre.
6. MATRIZ DE RECOMPENSA: Esta tabela ou matriz é usada para recompensar o robô por certas ações. A recompensa é positiva ou negativa dependendo da qualidade da ação.
int RECOMPENSAS [ESTADOS] [NUMBER_OF_ACTIONS] ={{-10, -2, -1,10},
{-10, -2, -1,10},
{-10, -2, -1,10},
{-10, -2, -1,10},
{-10, -2, -1,10},
{-10, -2, -1,10},
{-10, -2, -1,10},
{-10, -2, -1,10},
{-10, -2, -1,10},
{-10, -2, -1,10}};
7. MEIO AMBIENTE: Isso também pode ser assumido ou considerado como o mundo para o robô. Por exemplo, nós, humanos, vivemos na Terra, então basicamente a Terra é o nosso meio ambiente.
Hiperparâmetros na aprendizagem por reforço:
1 TAXA DE APRENDIZAGEM (ALFA): A taxa de aprendizado ou o tamanho do passo determinam em que medida as informações recém-adquiridas substituem as informações antigas. Um fator de 0 faz com que o agente não aprenda nada (explorando exclusivamente o conhecimento anterior), enquanto um fator de 1 faz com que o agente considere apenas as informações mais recentes (ignorando o conhecimento anterior para explorar possibilidades). Em ambientes totalmente determinísticos, uma taxa de aprendizagem de ALPHA =1,0 é ideal. Quando o problema é estocástico, o algoritmo converge sob algumas condições técnicas na taxa de aprendizagem que exige que ele diminua para zero. Na prática, geralmente é usada uma taxa de aprendizado constante, como ALPHA =0,1 para todos os cenários.
float ALPHA =0.2;
2. FATOR DE DESCONTO (GAMMA): O fator de desconto de 0 determina a importância das recompensas futuras. Um fator de 0 tornará o agente "míope" (ou míope), considerando apenas as recompensas atuais, enquanto um fator próximo a 1 o fará se esforçar por uma alta recompensa de longo prazo. Se o fator de desconto atingir ou ultrapassar 1, os valores da ação podem divergir. Para GAMMA =1,0, sem um estado terminal, ou se o agente nunca atingir um, todos os históricos do ambiente se tornam infinitamente longos e os utilitários com recompensas aditivas e não descontadas geralmente se tornam infinitos. Mesmo com um fator de desconto ligeiramente inferior a 1, Q o aprendizado da função leva à propagação de erros e instabilidades quando a função de valor é aproximada com uma rede neural artificial. Nesse caso, começar com um fator de desconto menor e aumentá-lo em direção ao seu valor final acelera o aprendizado.
float GAMMA =0.9;
3. TAXA DE EXPLORAÇÃO (EPSILON): Este parâmetro decide até que ponto o robô deve explorar o ambiente. Explorar o ambiente significa realizar ações aleatórias e analisar os resultados por meio de Q Values. Normalmente, no Q Learning (ao contrário do SARSA), nós nos livramos desse parâmetro à medida que o Robô aprende mais e mais. Mas neste projeto, não vamos nos livrar do Epsilon, pois não temos nenhum estado terminal. O Epsilon, neste caso, será reduzido até certo ponto e, em seguida, será redefinido novamente quando ficar abaixo de um valor limite. Isso garantirá que o robô continue explorando até sua vida, como nós, humanos, fazemos.
float EPSILON =0.75;
Q-LEARNING ALGORITHM:
- Inicialize a tabela de valores Q, Q (s, a) . Inicializei esses valores para 0,0.
- Observe o estado atual, s .
- Escolha uma ação, a , para aquele estado com base em uma das políticas de seleção de ação explicadas aqui na página anterior (📷-soft, 📷-greedy ou softmax).
////////////////////////// Epsilon Greedy Policy ///////////////// ///////////////
PROB =RANDOM (EPSILON);
if (PROB <=EPSILON) // EXPLORE AS AÇÕES
{
ACTION =random (0,4);
FLAG =2;
}
else // EXPLORAR AS AÇÕES DA TABELA Q
{
AÇÃO =ARGMAX (Q, ESTADO);
SINALIZADOR =2;
}
- Execute a ação e observe a recompensa, r , bem como o novo estado, s ' .
- Atualize o valor Q para o estado usando a recompensa observada e a recompensa máxima possível para o próximo estado. A atualização é feita de acordo com a fórmula e os parâmetros descritos acima.
- Defina o estado para o novo estado e repita o processo até que um estado terminal seja alcançado.
- Para entender o Q-learning melhor visitar este link:https://towardsdatascience.com/a-beginners-guide-to-q-learning-c3e2a30a653c

/////////////////// Implementação da Fórmula Q_Learning /////////////////////// ////
Q_OLD =Q_TABLE [S] [A];
Q_MAX =MAX (Q_TABLE, NEXT_S);
Q_NEW =(1-LEARNING_RATE) * Q_OLD + LEARNING_RATE * (R + DISCOUNT_FACTOR * Q_MAX);
Serial.print ("Q VALUE:");
Serial.println (Q_NEW);
Q_TABLE [S] [A] =Q_NEW;
Vídeo de trabalho:não se esqueça de verificar o vídeo de trabalho do AI Robot :)
Código
- Robô para evitar obstáculos usando Q-LEARNING
Robô para evitar obstáculos usando Q-LEARNING C / C ++
ESTE É UM CÓDIGO PRINCIPAL DO ROBÔ DE EVITAR OBSTÁCULO BASEADO EM INTELIGÊNCIA ARTIFICIAL. / * Este é um robô que evita obstáculo usando aprendizado por reforço / IA Autor deste projeto:Varun Walimbe Algoritmo usado neste projeto:Q learningComo funciona como evitar obstáculos? 1.Ultrassônico o sensor é usado para medir a distância do obstáculo usando seus Pinos de Eco e Trig.2. Quando a distância é medida e se for menor que 20 cm, então há um obstáculo próximo, caso contrário, o robô está seguro e continue em frente. virar à esquerda ou à direita dependendo da situação. Como funciona a prevenção de obstáculos baseada em IA? (aprendizagem Q) 1.Aqui a 1ª etapa do artigo superior permanece a mesma. No entanto, a 2ª etapa é diferente. 2. Uma lista de ações do robô são inicializado primeiro. Por exemplo, neste caso, as ações do robô são:Esquerda, Avançar, Recuar, Parar.3. Quando o robô se aproxima de um obstáculo, é necessário executar uma ação. No entanto, observe que, neste caso, o Robô não sabe qual ação tomar, pois não está pré-programado e vai aprender por conta própria para evitar obstáculos.4. Quando o Robô para quando há um obstáculo à sua frente, ele recebe a recompensa 0 Quando o Robô para e vai para trás, ele recebe uma recompensa de -5 Quando o Robô continua a se mover para frente ignorando os obstáculos, ele recebe uma recompensa de -10 Quando o Robô se move para a esquerda assim que o obstáculo é detectado, ele recebe uma recompensa de + 105. Desta forma, o Robô aprende por conta própria como evitar obstáculos pelo mecanismo de recompensa. * /////////// PARÂMETROS DE HARDWARE DO ROBÔ ////////////////////// int TRIG_PIN =7; int ECHO_PIN =8; duração int; distância de flutuação; int M1 =13; int M2 =12; int M3 =11; int M4 =10; bool Obstáculo =falso; int FLAG; ////////// ///////////////FIM////////////////////////////////// ////////////////////////////////////// Q LEARNING PARAMETERS ///////////////// //////////////////////////////// float ALPHA =0.1; // TAXA DE APRENDIZAGEMfloat GAMMA =0.5; // FATOR DE DESCONTOfloat EPSILON =0.90; // PARÂMETRO DE EXPLORAÇÃOint REWARD; // RECOMPENSA POR REALIZAR UMA AÇÃOint EPISODES =100; int STATE; // ESTADO ATUAL DO ROBOTint AÇÃO =0; // AÇÃO REALIZADA PELO ROBÔ (0:PARA A FRENTE, 1:PARA TRÁS, 2; PARADA, 3:PARA A ESQUERDA) float PROB; // USADO PARA EPSILON DECAY bool ACTION_TAKEN =false; // ESTA VARIÁVEL NOS DIZ SE UMA AÇÃO É TOMADA OU NÃO int NEXT_STATE; // PRÓXIMO ESTADO DO ROBÔconst int STATES =10; // NÚMERO DE ESTADOS NO AMBIENTE int ACTIONS [4] ={1,2,3,4}; const int NUMBER_OF_ACTIONS =4; // TOTAL TEMOS 4 AÇÕES PARA FRENTE, PARA TRÁS, ESQUERDA E PARADA / * ESTA É A MATRIZ Q OU TABELA Q. ESTE É BASICAMENTE O DIÁRIO QUE O ROBÔ OLHARÁ ANTES DE REALIZAR UMA AÇÃO. COM BASE NA AÇÃO, O ROBÔ GANHARÁ RECOMPENSA E O VALOR Q SERÁ ATUALIZADO NESTA TABELA Q. AQUI EU CONISTEI 10 ESTADOS. ACEI QUE TODOS OS ESTADOS SÃO DIFERENTES MESMO QUE SÃO OS MESMOS.BASICAMENTE OBSTÁCULO, EVITAR O ROBÔ CONTÉM APENAS DUAS ESTADOS, isto é:1:QUANDO ESTÁ LONGE DO OBSTÁCULO 2:QUANDO ESTÁ PRÓXIMO DO OBSTÁCULO, MAS AQUI ESTÃO ACESSÓRIOS PARA ILUSTRAR MAIS COMPLEXO 10 ESTADOS DIFERENTES AQUI ESPERANDO A MESMA / AÇÃO DIFERENTE. * / Float Q [STATES] [NUMBER_OF_ACTIONS] ={{0.0,0.0,0.0,0.0}, // O MAIS IMPORTANTE DE TODOS É A TABELA Q. {0.0,0.0,0.0,0.0}, // É FORMADO PELOS ESTADOS COMO SUAS LINHAS {0.0,0.0,0.0,0.0}, // E COLUNAS COMO SEU NÚMERO DE AÇÕES {0.0,0.0,0.0,0.0}, / / INICIALIZADO PARA ZERAR NO INÍCIO {0.0,0.0,0.0,0.0}, // ISTO SERÁ ATUALIZADO NO FUTURO. {0.0,0.0,0.0,0.0}, {0.0,0.0,0.0,0.0}, {0.0,0.0,0.0,0.0}, {0.0,0.0,0.0,0.0}, {0.0,0.0,0.0,0.0}}; / * ESTA É UMA MATRIZ OU TABELA DE RECOMPENSAS. ISTO É RESPONSÁVEL POR DAR RECOMPENSA AO ROBÔ PARA REALIZAR AÇÃO PARTICULAR. ARMAZENA A RECOMPENSA POR CADA AÇÃO TOMADA NO ESTADO. A RECOMPENSA SERÁ POSITIVA SE A AÇÃO REALIZADA FOR BOA E NEGATIVA SE A AÇÃO DAR RESULTADOS RUINS. * / Int RECOMPENSAS [STATES] [NUMBER_OF_ACTIONS] ={{-10, -2, -1,10}, {-10, -2 , -1,10}, {-10, -2, -1,10}, {-10, -2, -1,10}, {-10, -2, -1,10}, {-10, -2, -1,10}, {-10, -2, -1,10}, {-10, -2, -1,10}, {-10, -2, -1,10}, {- 10, -2, -1,10}}; ////////////////////////////////////////////FIM///// //////////////////////////////////////////////////////// //////////// Q LEARNING UPDATE PARAMETERS //////////// float Q_OLD; float Q_NEW; float Q_MAX; /////////////// ///////////// END ////////////////////////// void setup () {Serial.begin (9600 ); pinMode (TRIG_PIN, OUTPUT); pinMode (ECHO_PIN, INPUT); pinMode (M1, OUTPUT); pinMode (M2, SAÍDA); pinMode (M3, SAÍDA); pinMode (M4, SAÍDA); randomSeed (analogRead (A0)); ESTADO =0; Serial.println ("O TREINAMENTO COMEÇARÁ EM 5 SEGUNDOS:"); delay (5000);} //////////////////////////// FUNÇÕES DO ROBÔ ////////////// ///////////////////// void Forward () {digitalWrite (M1, LOW); digitalWrite (M2, ALTO); digitalWrite (M3, LOW); digitalWrite (M4, HIGH); } void Backward () {digitalWrite (M1, HIGH); digitalWrite (M2, BAIXO); digitalWrite (M3, HIGH); digitalWrite (M4, BAIXO);} void Esquerda () {digitalWrite (M1, ALTO); digitalWrite (M2, BAIXO); digitalWrite (M3, LOW); digitalWrite (M4, HIGH);} void Right () {digitalWrite (M1, LOW); digitalWrite (M2, ALTO); digitalWrite (M3, HIGH); digitalWrite (M4, LOW);} void Stop () {digitalWrite (M1, LOW); digitalWrite (M2, BAIXO); digitalWrite (M3, LOW); digitalWrite (M4, LOW);} bool Obstacle_Avoider () {digitalWrite (TRIG_PIN, HIGH); atrasoMicrosegundos (10); digitalWrite (TRIG_PIN, LOW); duração =pulseIn (ECHO_PIN, HIGH); distância =(duração / 2) / 29,1; if (distância <15) {Obstáculo =verdadeiro; } if (distância> 15) {Obstáculo =falso; } atraso (10); return Obstacle;} ////////////////////////////////////////////// END / //////////////////////////////////////////////////////// //////////////////////////////// ROBOT'S Q LEARNING FUNCTIONS //////////////////// //////////////////// float RANDOM (float EXPLORATION_PARAMETER) {/ * ESTA FUNÇÃO ENCONTRA O NÚMERO RANDOM QUE DECIDE SE UMA AÇÃO A SER TOMADA É ALEATÓRIA OU DE Q_TABLE * / float RANDOM_VARIABLE; flutuar PROBABILIDADE; RANDOM_VARIABLE =aleatório (0,100); PROBABILITY =RANDOM_VARIABLE / 100; return PROBABILITY;} float DECAY (float PARAMETER) {/ * ESTA FUNÇÃO É UTILIZADA PARA REDUZIR EPSILON (EXPLORATION PARAMETER) COM O TEMPO. FINALMENTE NO FINAL VOCÊ OBTEM RID EPSILON E O ROBOT APRENDE A EVITAR OBSTÁCULOS NOS SEUS PRÓPRIOS * / PARAMER * 0,98; // PARÂMETRO AQUI ESTÁ O PARÂMETRO EPSILON return;} int GET_STATE () {int STATE_NUMBER; STATE_NUMBER =aleatório (0,10); return STATE_NUMBER;} float MAX (float Q_Table [] [4], int NEXT_S) {/ * ESTA FUNÇÃO ENCONTRA O MAIOR NÚMERO NA Q_TABLE [NEXT_STATE]. O PAPEL PRINCIPAL DESTA FUNÇÃO É ENCONTRAR O PARÂMETRO Q_MAX * / float LIST [4]; float N1; float N2; flutuante MAX_VALUE =0,0; float DIFF; para (int b =0; b <=3; b ++) {LISTA [b] =Q [NEXT_S] [b]; } para (int j =0; j <=2; j ++) {if (MAX_VALUE> LIST [j]) {N1 =MAX_VALUE; } senão {N1 =LISTA [j]; } N2 =LISTA [j + 1]; DIFF =N1- N2; if (DIFF> 0) {MAX_VALUE =N1; } mais {MAX_VALUE =N2; }} return MAX_VALUE;} int ARGMAX (float Q_Table [] [4], int S) {/ * ESTA FUNÇÃO ENCONTRA O ÍNDICE DO MAIOR VALOR Q NA Q TABLE [STATE] * / float ARRAY [4]; float N1; float N2; flutuante MAX_VALUE =0,0; float DIFF; float NUMBER; int MAX_INDEX; para (int u =0; u <=3; u ++) {ARRAY [u] =Q_Table [S] [u]; } para (int p =0; p <=2; p ++) {if (MAX_VALUE> ARRAY [p]) {N1 =MAX_VALUE; } senão {N1 =ARRAY [p]; } N2 =ARRAY [p + 1]; DIFF =N1- N2; if (DIFF> 0) {MAX_VALUE =N1; } mais {MAX_VALUE =N2; }} para (int r =0; r <=3; r ++) {NUMBER =ARRAY [r]; if (NUMBER ==MAX_VALUE) {MAX_INDEX =r; pausa; }} return MAX_INDEX;} void Update (float Q_TABLE [] [4], int S, int NEXT_S, int A, int ACTIONS [], int R, float LEARNING_RATE, float DISCOUNT_FACTOR) {/ * ESTA FUNÇÃO ATUALIZA A TABELA Q E VALORES Q. ESTA ATUALIZAÇÃO CONTINUA ACONTECENDO ATÉ AS EXTREMIDADES PRINCIPAIS DO LOOP. NO FINAL DOS EPISÓDIOS A TABELA Q ESTÁ PREENCHIDA COM VÁRIOS VALORES. QUANTO MAIORES OS VALORES, MAIOR IMPORTÂNCIA QUE A AÇÃO TEM NESSE ESTADO EM PARTICULAR. "Q_OLD" É O VALOR ANTIGO QUE A MATRIZ Q TEM. ESTE É O VALOR QUE É ATUALIZADO EVENTUALMENTE. Q_NEW É O NOVO Q_VALUE CALCULADO PELA FÓRMULA Q LEARNING. A FÓRMULA DE APRENDIZAGEM Q USADA AQUI É BASEADA NA EQUAÇÃO DE BELLMAN USA A ABORDAGEM DE APRENDIZAGEM DE DIFERENÇA TEMPORAL. (A ABORDAGEM DE MONTE CARLO NÃO FUNCIONA NESTE CASO DE OBSTÁCULO EVITANDO O ROBÔ. * / Q_OLD =Q_TABLE [S] [A]; Q_MAX =MAX (Q_MAX =MAX (Q_MAX =MAX () NEXT_S); Q_NEW =(1-LEARNING_RATE) * Q_OLD + LEARNING_RATE * (R + DISCOUNT_FACTOR * Q_MAX); Serial.print ("Q VALUE:"); Serial.println (Q_NEW); Q_TABLE [S] [A] =Q_NEW;} //////////////////////////////////////////////////// ///////////FIM////////////////////////////////////// //////////////////////////////////////////////////////// //////////////// START OF MAIN LOOP //////////////////////////////// ///////////////////// void loop () {//////////////////////////// ///////////////TREINAMENTO////////////////////////////////// ////////// for (int I =0; I Esquemas
obstacle_avoiding_robot_using_ai_DcoMCWIOFm.fzz









