


Swiper - Auto Tinder / Bumble Swiper
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Aplicativos e serviços online
 |
|
Sobre este projeto
História de fundo
Meus amigos fizeram um Tinder para mim e, como a maioria das pessoas no aplicativo, fiquei rapidamente decepcionado com o quão monótono ele era. Então eu percebi que era um engenheiro muito melhor do que um companheiro em potencial, então eu juntei as peças de um motor de passo barato que eu tinha por perto. Portanto, agora você também pode obter mais de 800 furtos por hora com isso no Bumble ou no Tinder!
Visão geral rápida:
Existem três etapas rápidas para esta construção:imprimir as peças, conectar a fiação + testar o motor de passo e colocar tudo junto.
Etapa 1:impressão das peças
Verifique https://www.thingiverse.com/thing:2849598 para os arquivos 3D imprimíveis. A principal coisa a observar sobre esses arquivos é que usei 50% de preenchimento para criar a base, isso é para sobrecarregar a base para que ela não se mova ao deslizar.
Etapa 2:o motor de passo
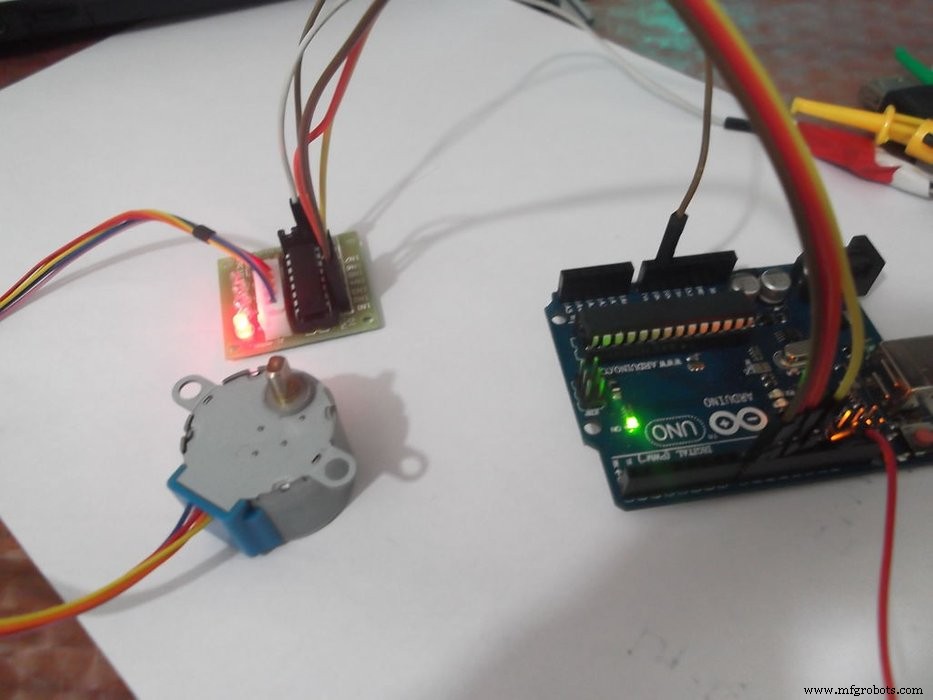
Eu usei um motor de passo 28-BYJ48 unipolar e um driver de motor de passo SBT0811. Qualquer driver de motor de passo que funciona com o 28-BYJ48 deve estar bem, apenas certifique-se de conectá-lo ao seu Arduino Uno de acordo com a seguinte configuração ou alterar o código para refletir suas alterações:
- IN1>> D8
- IN2>> D9
- IN3>> D10
- IN4>> D11
- VCC>> 5V
- Gnd >> Terrestre
O código do Arduino Uno está na parte inferior da página. Neste ponto, você deve ser capaz de apenas carregar o código em seu Arduino e ter um motor de passo giratório no sentido horário! Se você quiser mudar a direção para girar no sentido anti-horário, basta mudar a Direção variável para falso

Etapa 3:juntando tudo
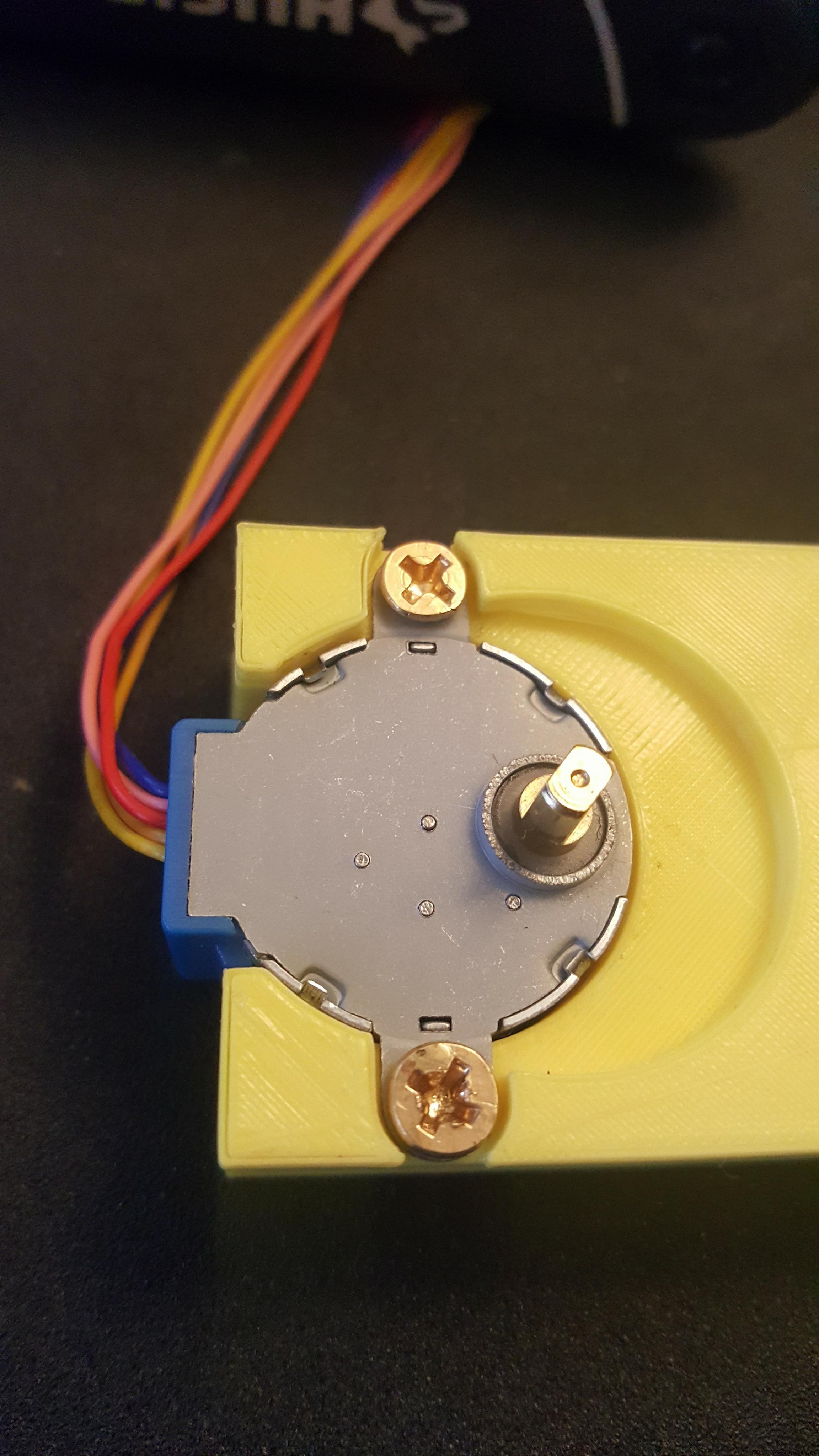
Neste ponto, você tem todas as partes separadas prontas e só temos que combiná-las! Vá em frente e primeiro coloque seu motor de passo dentro da base do swiper. Usei dois pequenos parafusos de madeira para prendê-lo na impressão 3D.
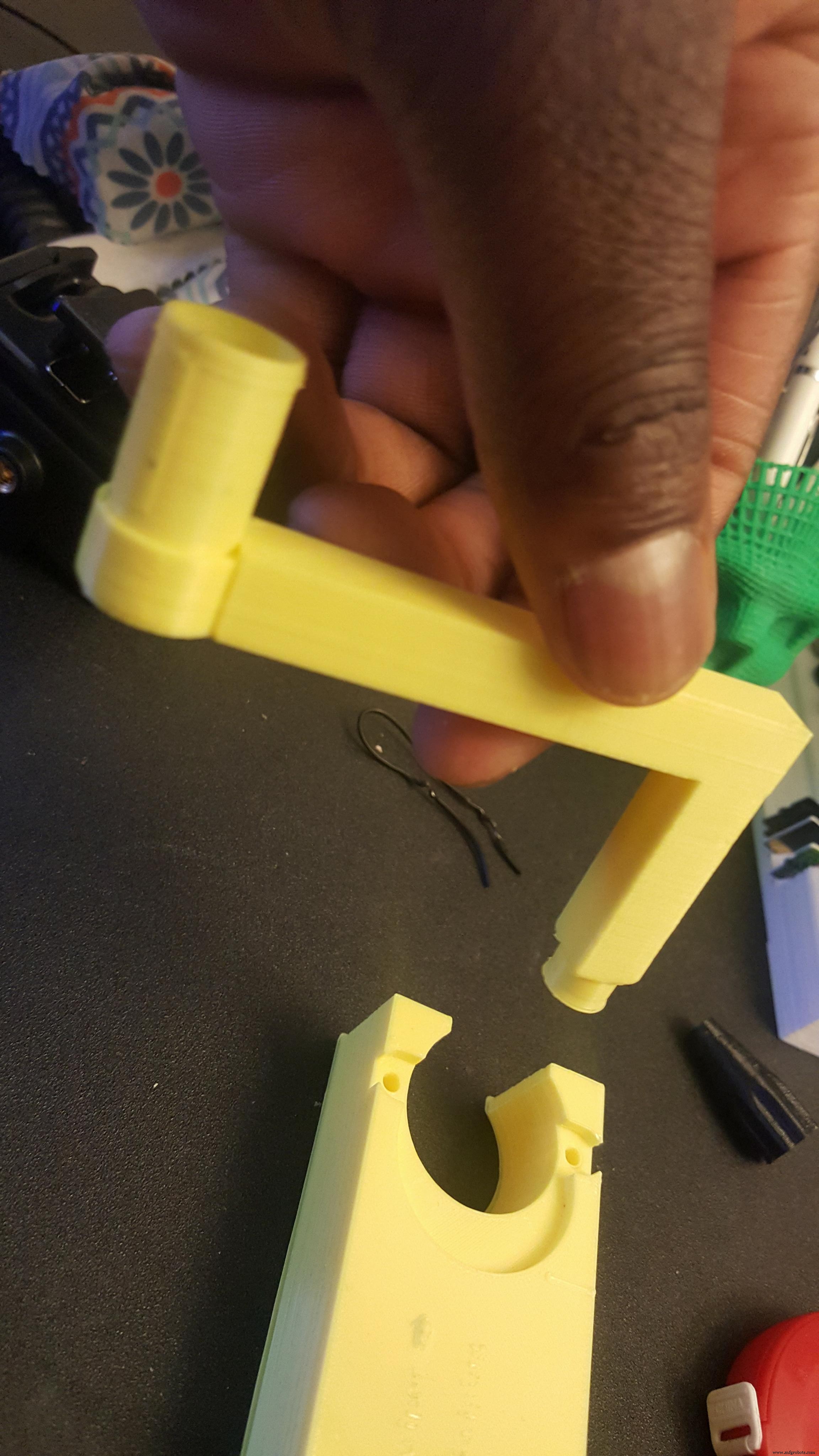
Em seguida, vá em frente e coloque a alça do limpador no motor de passo.
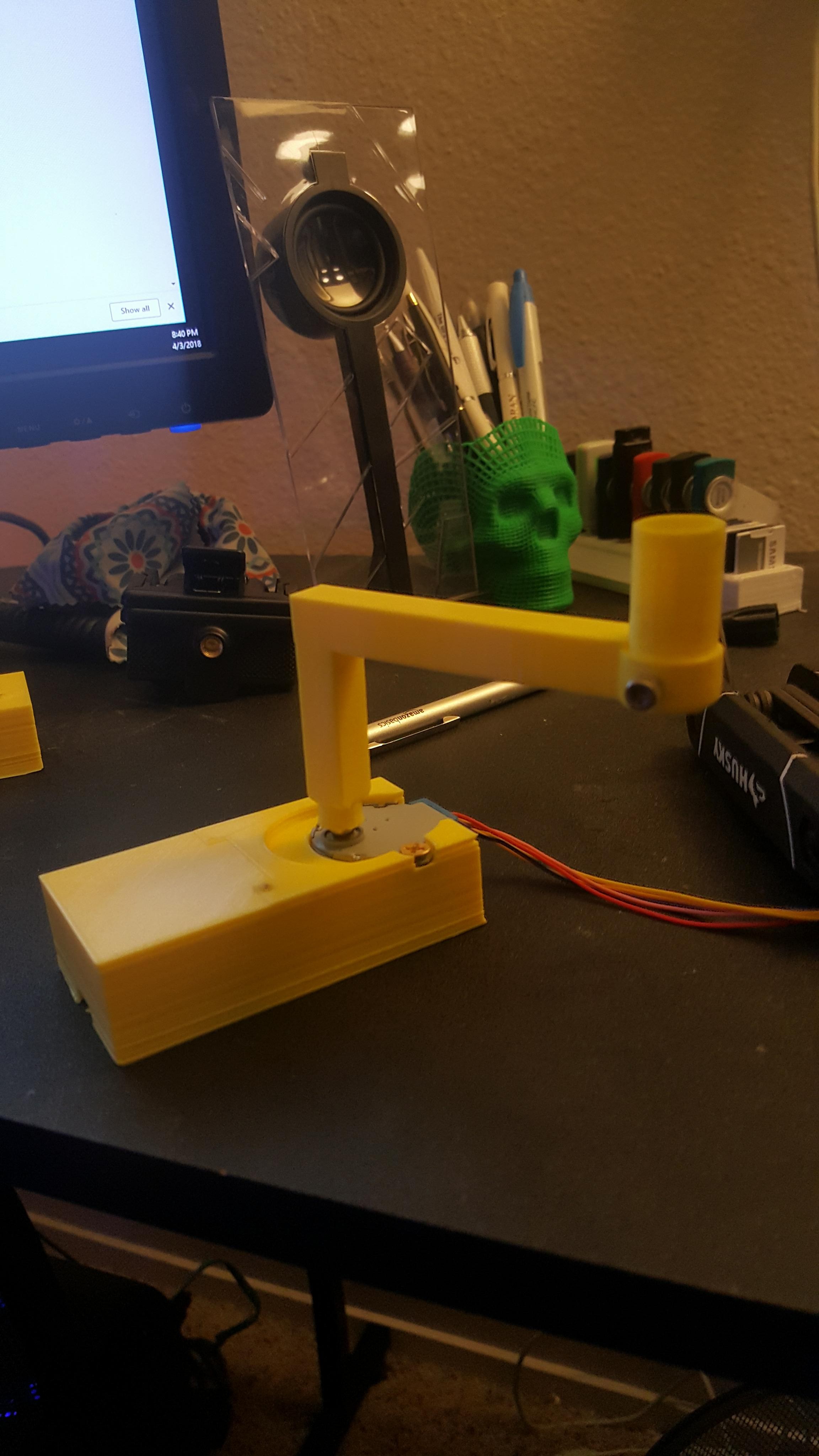
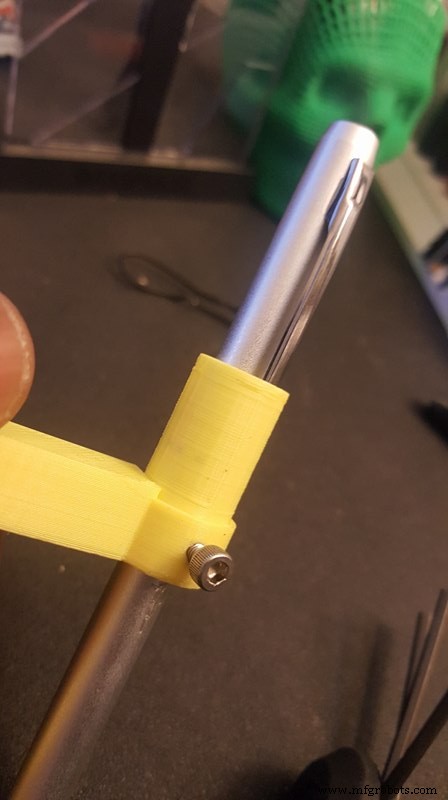
Para calibrar a altura; coloque toda a estrutura acima de um telefone e coloque a caneta da tela de toque na alça do swiper até que a caneta da tela de toque toque a tela.

Neste ponto, vá em frente e pegue um parafuso M3 curto e prenda sua caneta da tela de toque para que ela não se mova ao deslizar.
Finalmente deslize o dedo
Coloque toda a estrutura adjacente ao telefone, abra o aplicativo de namoro desejado, vire o aplicativo Arduino e sente-se!
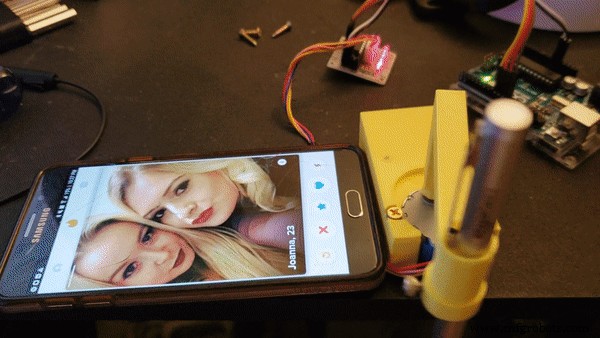
Eu testei isso em 4 telefones diferentes e um dos telefones estava tendo problemas para registrar corretamente os deslizamentos e iria para a tela anterior. Isso ocorre porque a borda do último telefone testado era bastante sensível, você pode consertar colocando seu telefone em uma caixa com uma borda elevada, de forma que a caneta touchscreen não registre na borda da tela.
Código
- Swiper
Swiper Arduino
Alterar direção =falso para verdadeiro se você quiser alterar a direção de passagem! / * Código do motor de passo BYJ48 Conecte:IN1>> D8 IN2>> D9 IN3>> D10 IN4>> D11 VCC>> 5V Gnd escrito por:Mohannad Rawashdeh https://www.instructables.com/member/Mohannad+Rawashdeh/ 28/9/2013 * / # define IN1 8 # define IN2 9 # define IN3 10 # define IN4 11int Passos =0; boolean Direction =false; // muda para true para deslizar para a direita sem sinal longo last_time; sem sinal longo currentMillis; int steps_left =4095; long time; void setup () {Serial.begin (115200); pinMode (IN1, OUTPUT); pinMode (IN2, OUTPUT); pinMode (IN3, OUTPUT); pinMode (IN4, OUTPUT); // delay (1000);} void loop () {while (steps_left> 0) {currentMillis =micros (); if (currentMillis-last_time> =1000) {stepper (1); time =time + micros () - last_time; last_time =micros (); passos_esquerdo--; }} steps_left =4095;} void stepper (int xw) {for (int x =0; x 7) {Passos =0;} if (Passos <0) {Passos =7; }} Processo de manufatura