


Faça um Robô Comer Com Arduino Nano | Parafuso de ouro
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Ferramentas e máquinas necessárias
 |
|
Aplicativos e serviços online
 |
| |||
 |
|
Sobre este projeto
A ideia desse projeto veio da minha filha.
Ela quer um robô, e este robô pode abrir sua boca para colocar comida em sua boca.
Então, procurei dentro de casa as coisas que estavam disponíveis:papelão, Arduino Nano, sensor ultrassônico, servo motor ... para poder criar um robô para as meninas brincarem no menor tempo possível e com o menor custo possível.
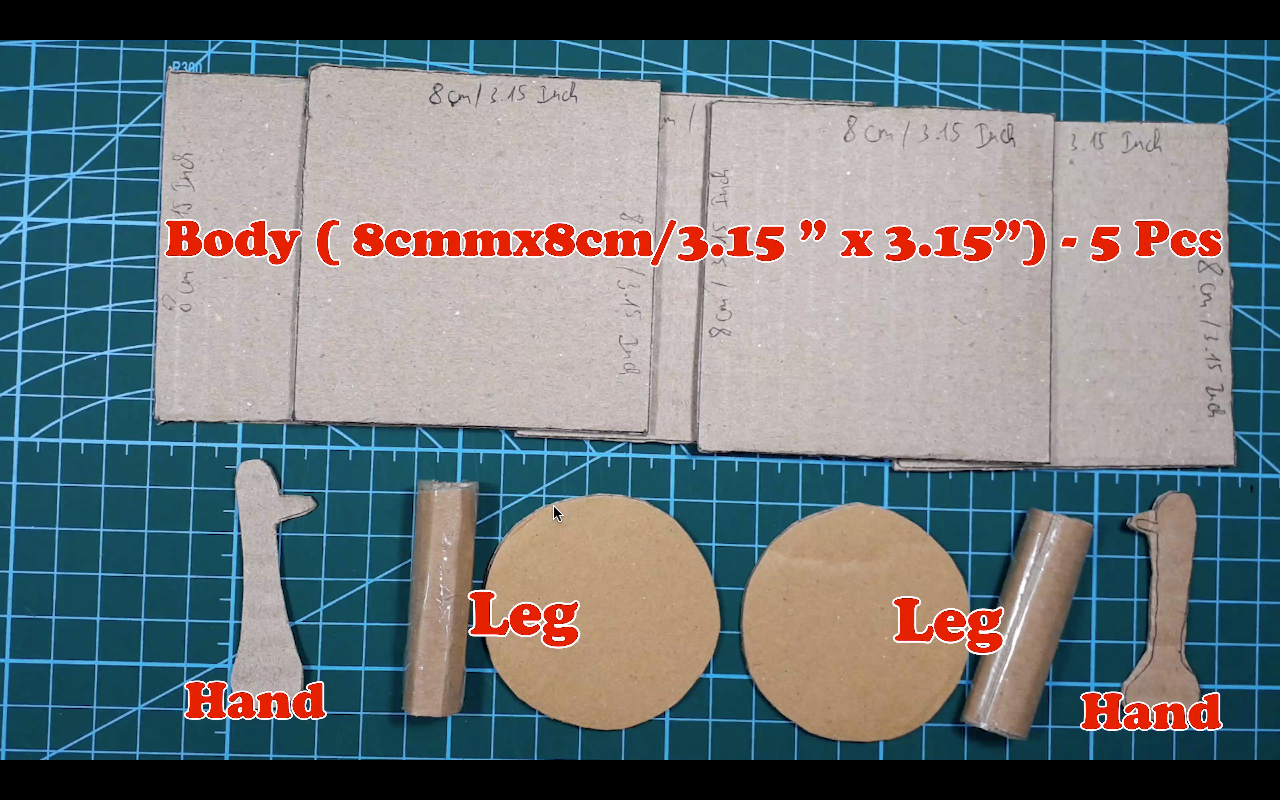
Criar corpo
Estou usando papelão para fazer o corpo do robô
Usando cola quente para conectar todas as peças
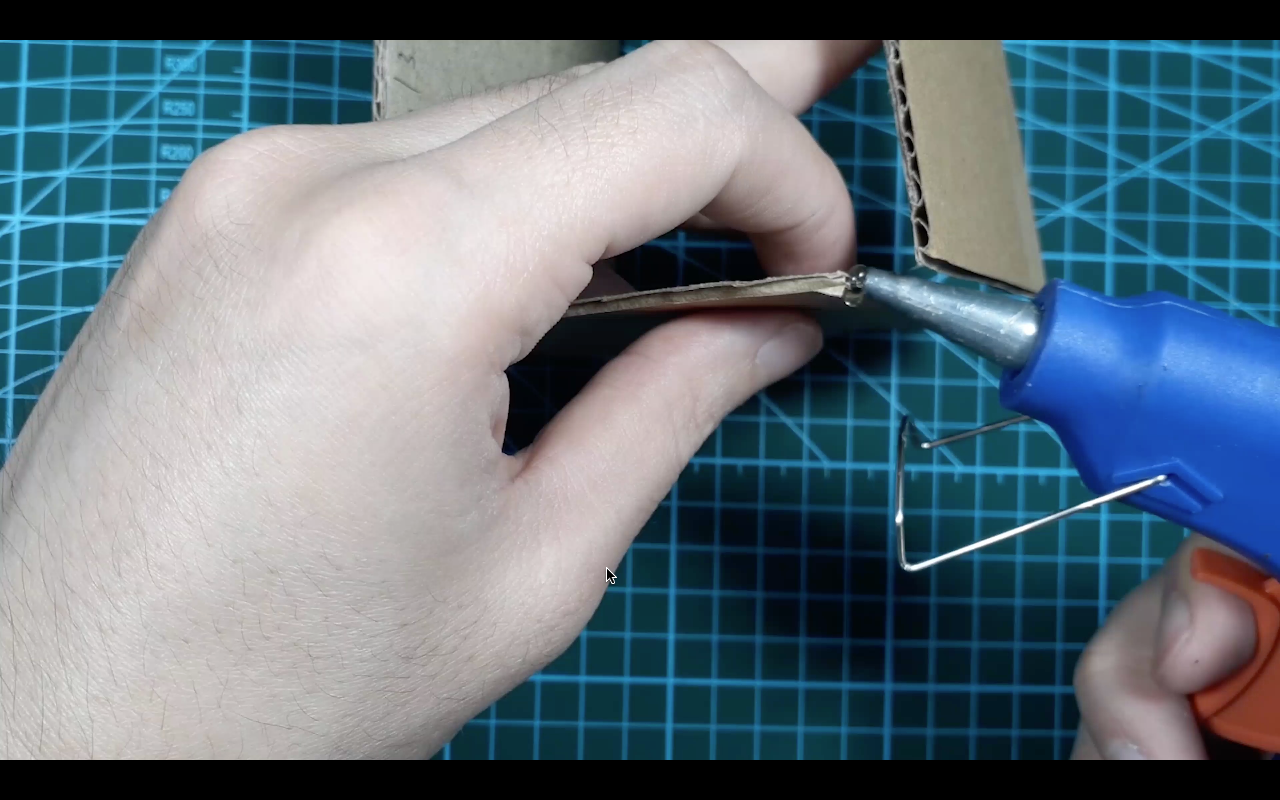
A maior parte do corpo feito

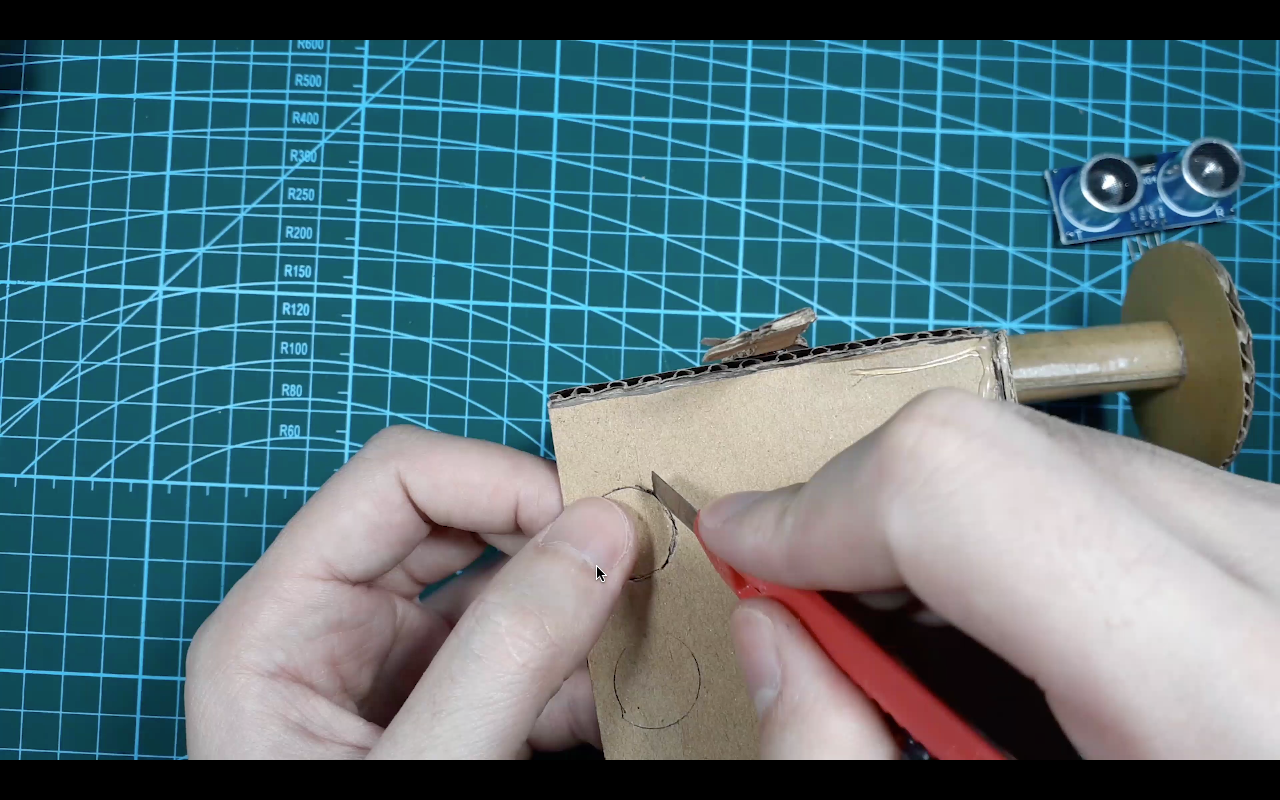
Faça buracos para os olhos
Fazer boca
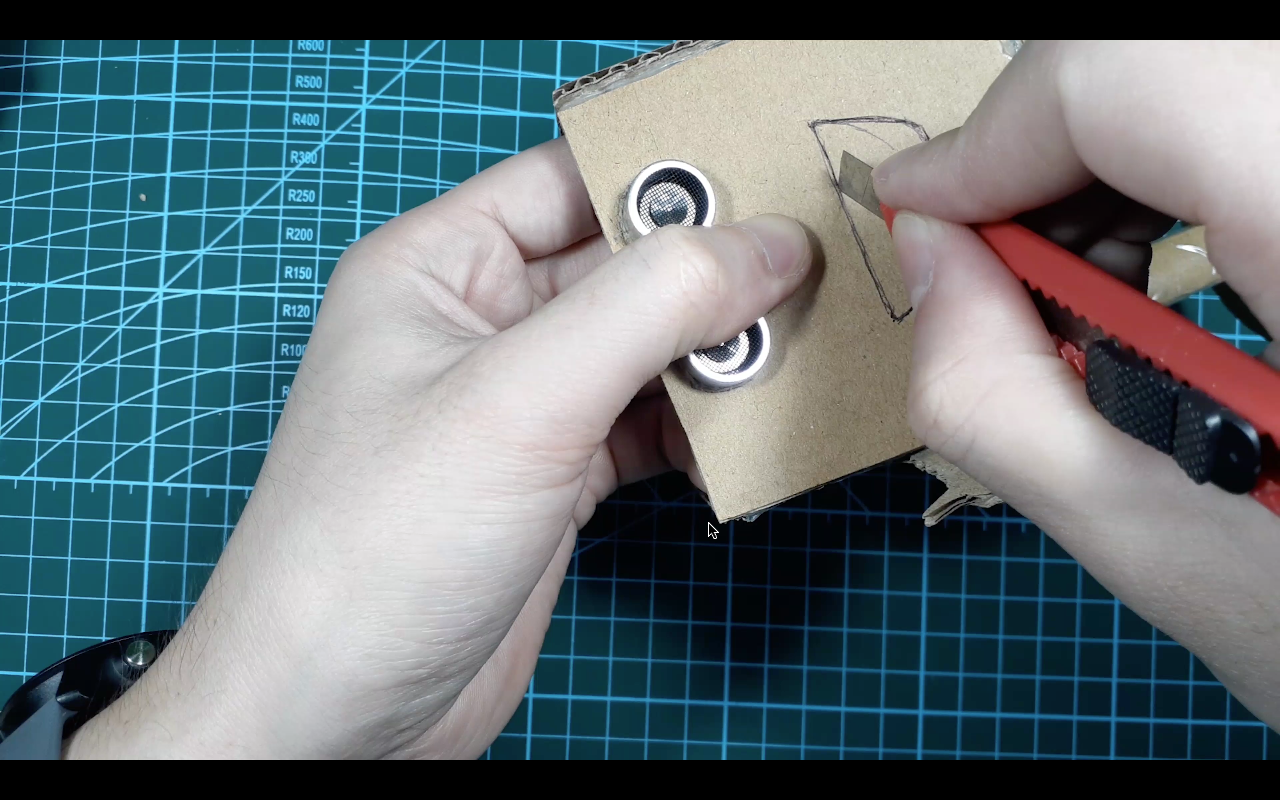
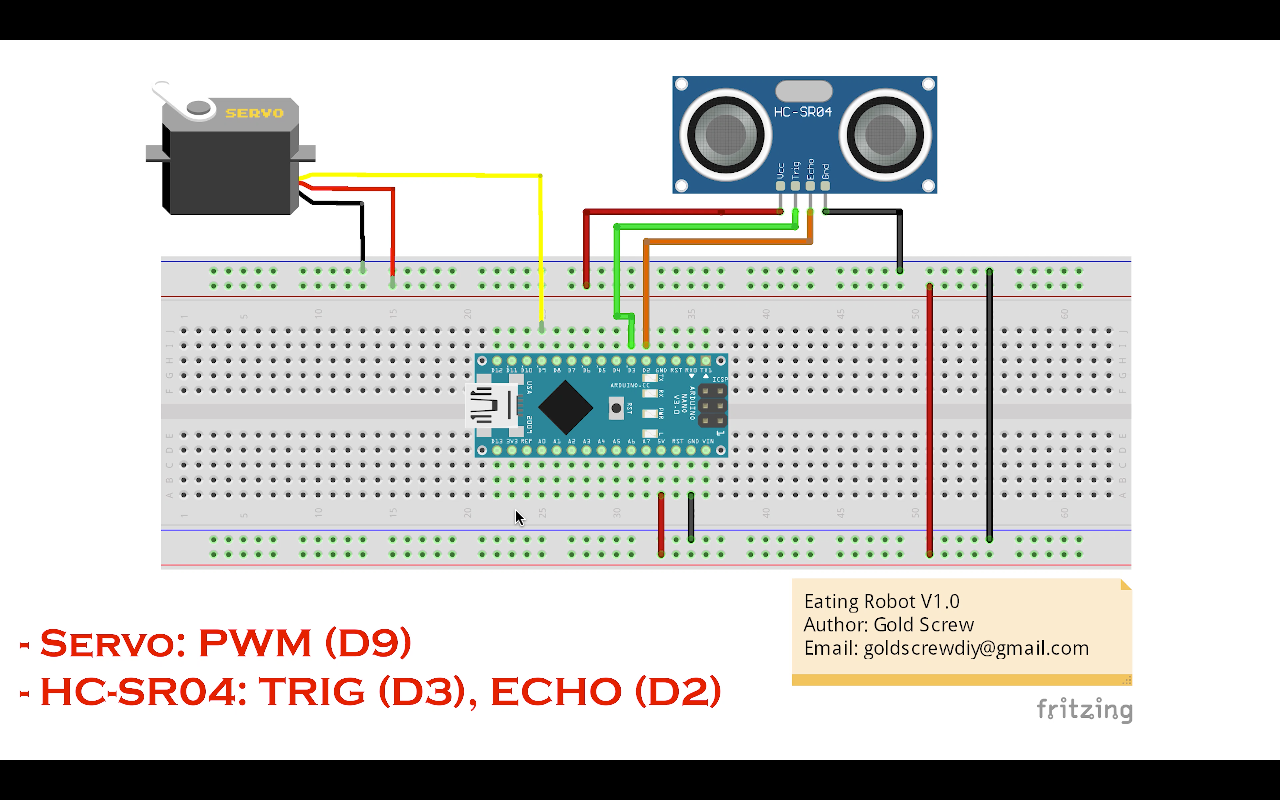
Diagrama de conexão de componentes / peças
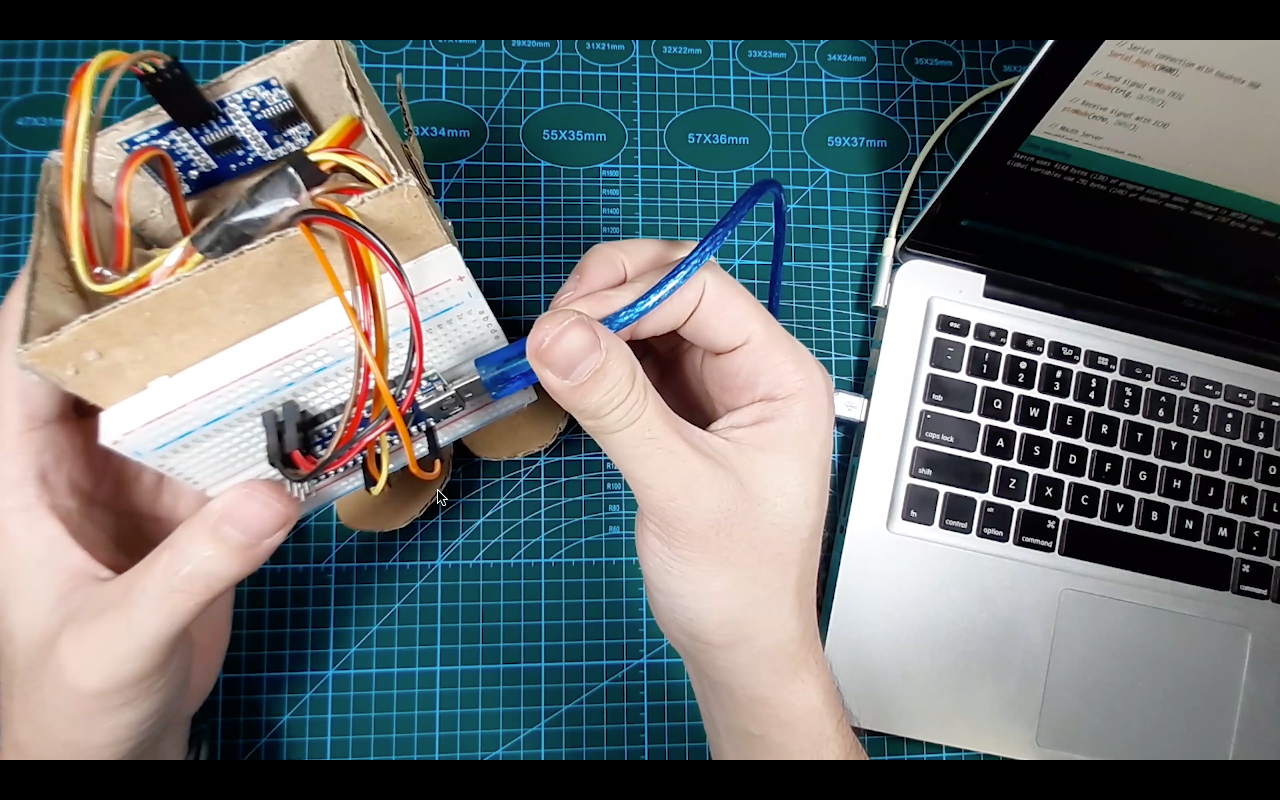
Conecte a alimentação USB
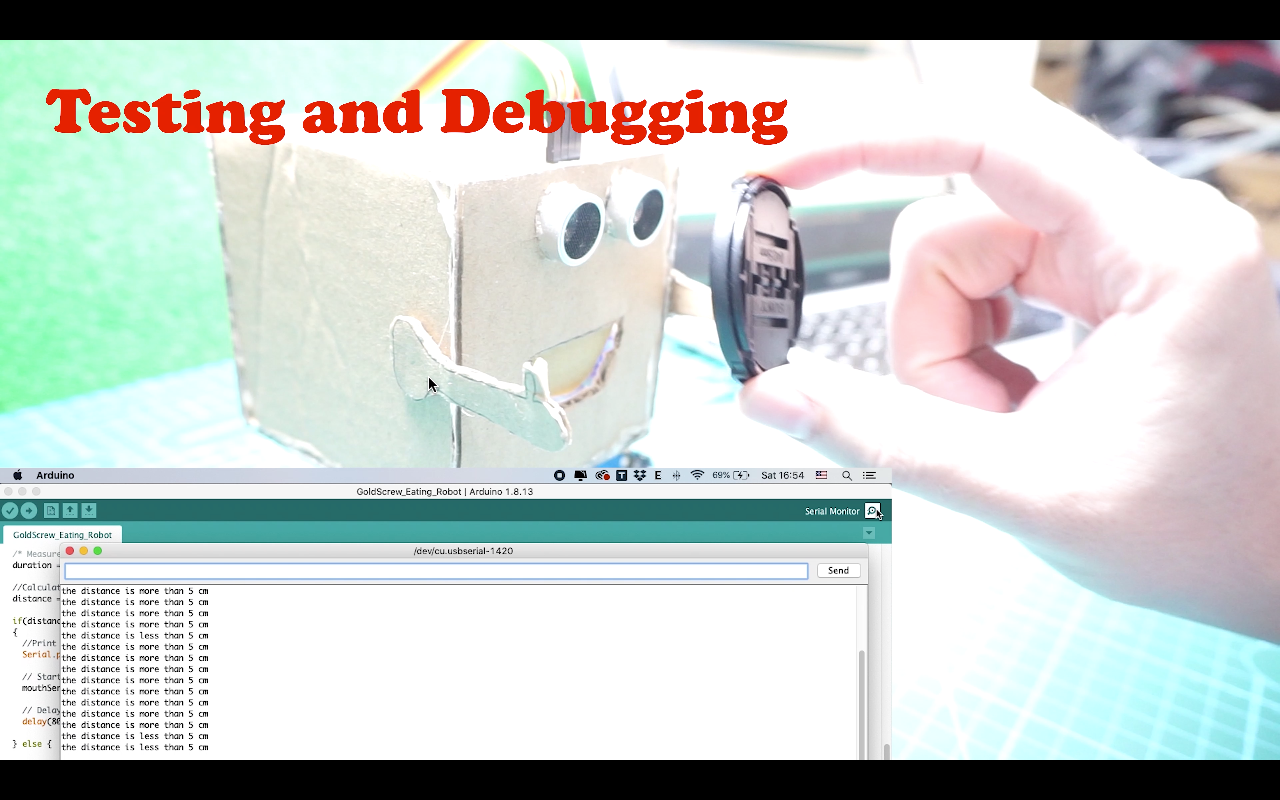
Teste e depuração
Está feito!

Código
- GoldScrew_EatingRobot.ino
GoldScrew_EatingRobot.ino Arduino
/ * * Cartboard eating Robot * Autor:GoldScrew * Email:goldscrewdiy@gmail.com * Descrição:Está usando HC-SR04 (Detectar comida à distância <=5 cm) e Servidor (para abrir e fechar a boca) * / #include#define SERVO_PIN 9 // Defina o pino 9 para servo // HC-SR04 sensor ultrassônicoconst int trig =3; // trigonometria de HC-SR04const int echo =2; // eco de HC-SR04 // ServoServo mouthServo; void setup () {// Conexão serial com baudrate 960 Serial.begin (9600); // Envie o sinal com TRIG pinMode (trig, OUTPUT); // Recebe o sinal com ECHO pinMode (echo, INPUT); // Servidor de boca mouthServo.attach (SERVO_PIN); mouthServo.write (90); } void loop () {/ * Duração * / unsigned long duration; distância interna; // Distância / * Enviar sinal do pino TRIG * / digitalWrite (trig, 0); // Interrompe o atraso do pino trigonométricaMicroseconds (2); // Atrasar 2 microssegundos digitalWrite (trig, 1); // Enviar sinal do pino TRIG delayMicroseconds (10); // Atrasar 10 microssegundos digitalWrite (trig, 0); // Parar o pino trigonométrico / * Medir a largura de pulso HIGH no pino ECHO * / duração =pulseIn (echo, HIGH); // Calcular distância distance =int (duration / 2 / 29.412); if (distance <=5) {// Distância de impressão Serial.println ("a distância é menor que 5 cm"); // Inicia a boca aberta mouthServo.write (0); // Atraso de atraso (1200); } else {// Distância de impressão Serial.println ("a distância é maior que 5 cm"); // Fecha a boca mouthServo.write (90); } // Atraso de atraso (200);}
Esquemas
Processo de manufatura
- Jogo Arduino Gyroscope com MPU-6050
- Unopad - Controlador Arduino MIDI com Ableton
- Obstáculos para evitar o robô com servo motor
- Sensor de obstáculo simples com Arduino
- Arduino Nano:Controle 2 motores de passo com joystick
- Robô de piano controlado por Arduino:PiBot
- Contador Geiger portátil com Arduino Nano
- Como fazer música com um Arduino
- Como fazer a abertura automática de porta baseada no Arduino
- Controlar Arduino Robot Arm com aplicativo Android