


Projeto de braço robótico:um guia passo a passo
Você está lutando com tarefas que precisam de um alto grau de precisão? Ou você está lidando com operações consistentes e repetitivas que exigem alta precisão e desempenho? Então, você precisa de um projeto de braço robótico.
Além disso, é um dispositivo PCB eletrônico confiável que pode realizar uma ampla gama de operações. Então, você encontrará o braço robótico em diferentes indústrias, como:
- Acesso à máquina
- Laboratórios
- Automação industrial
- Fabricação
Portanto, será uma ideia brilhante assumir o projeto do braço robótico. Sem dúvida, parece complicado no início, mas, com todos os materiais no lugar, a tarefa será mais simples. Neste artigo, daremos detalhes sobre como construir um braço robótico.
Vamos ao trabalho!
O que é um braço robótico?

Braço Robótico Industrial
Um braço robótico refere-se a uma ferramenta mecânica que você pode automatizar por meio de um software especial. E você pode instalar o software especial em um microcontrolador específico. Na maioria das vezes, esse dispositivo pode ser parte de um robô humano ou um dispositivo independente.
Além disso, o tipo de tarefa que executa depende do movimento da articulação do braço. Por exemplo, você pode ver um braço robótico e um braço robótico com juntas separadas que podem se mover em uma direção reta.
Como você faz um braço robótico simples?
Mostraremos como fazer um braço robótico simples que lembrará a sequência de movimentos e jogará. Dito isso, vamos dar uma olhada nos componentes que você precisa para o projeto:
- Breadboard
Uma tábua de pão
- Pedaços de madeira
- IDE do Arduino instalado
- Servomotores (5)
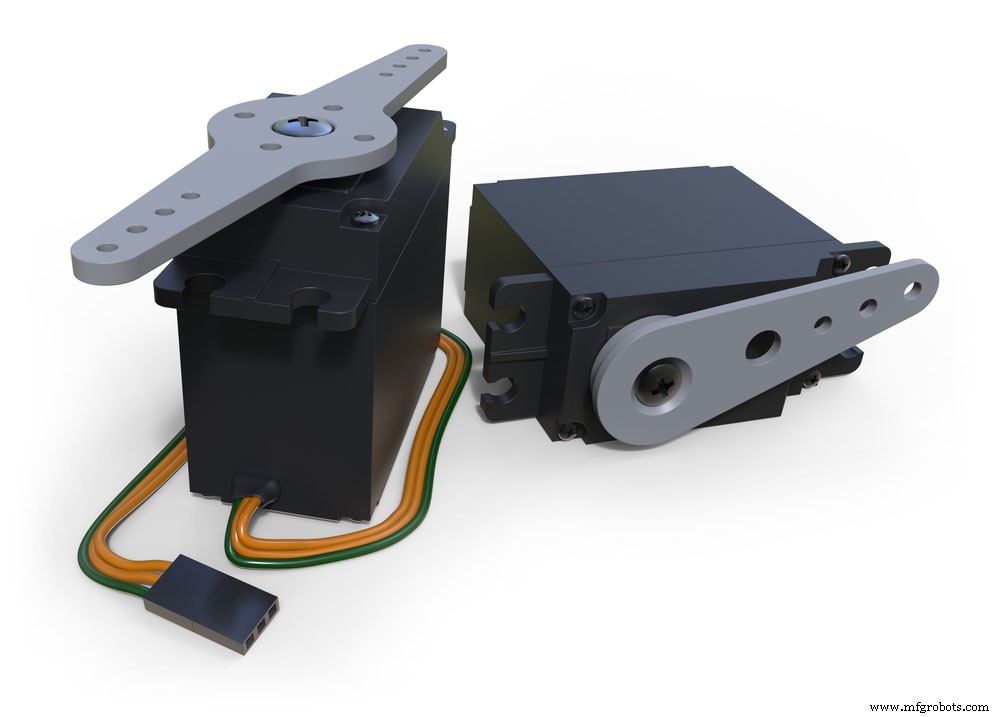
Conjunto de servomotores
- Arduino UNO
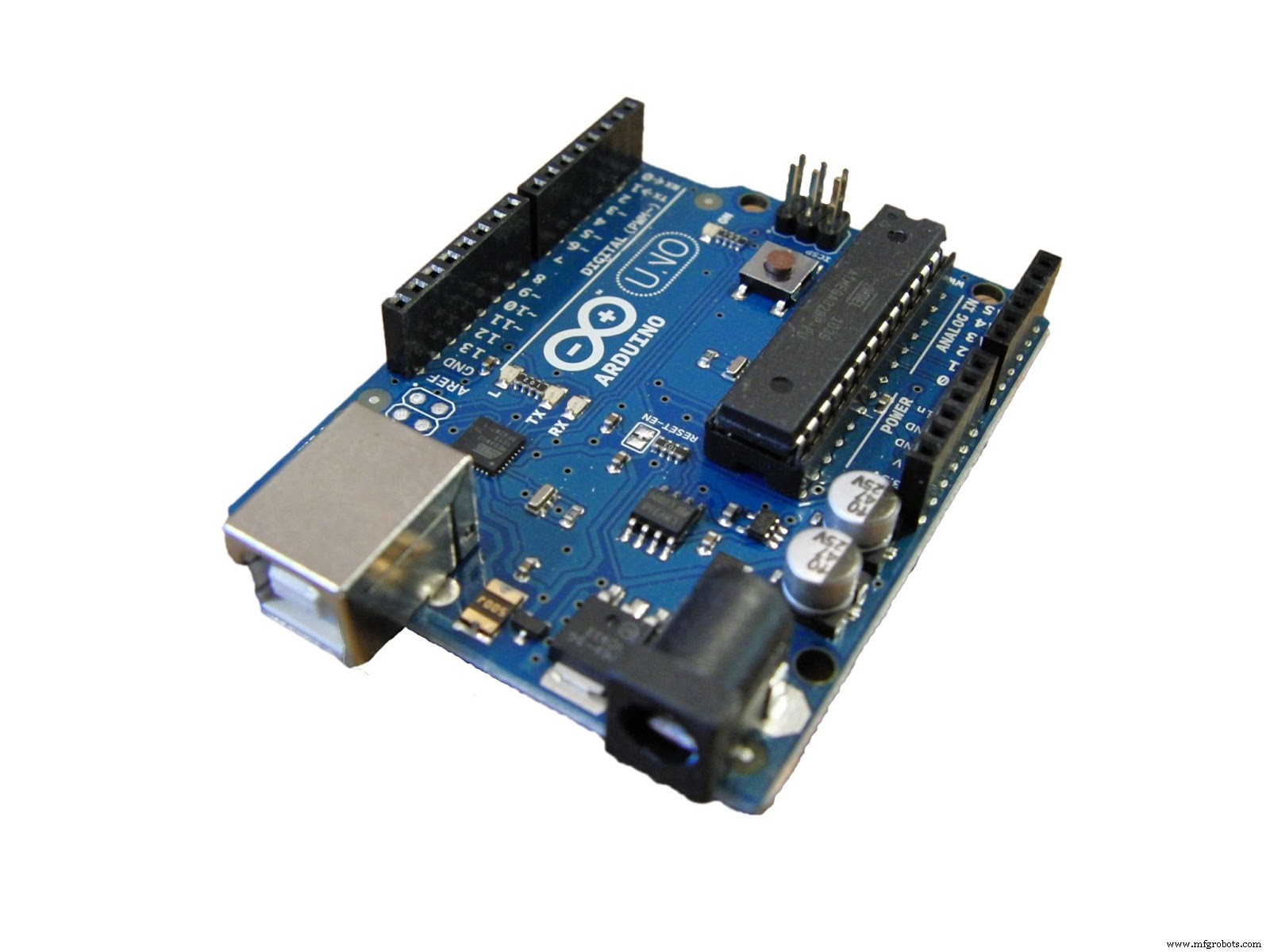
Arduíno UNO
Fonte:Wikimedia Commons
- Potenciômetros (5)
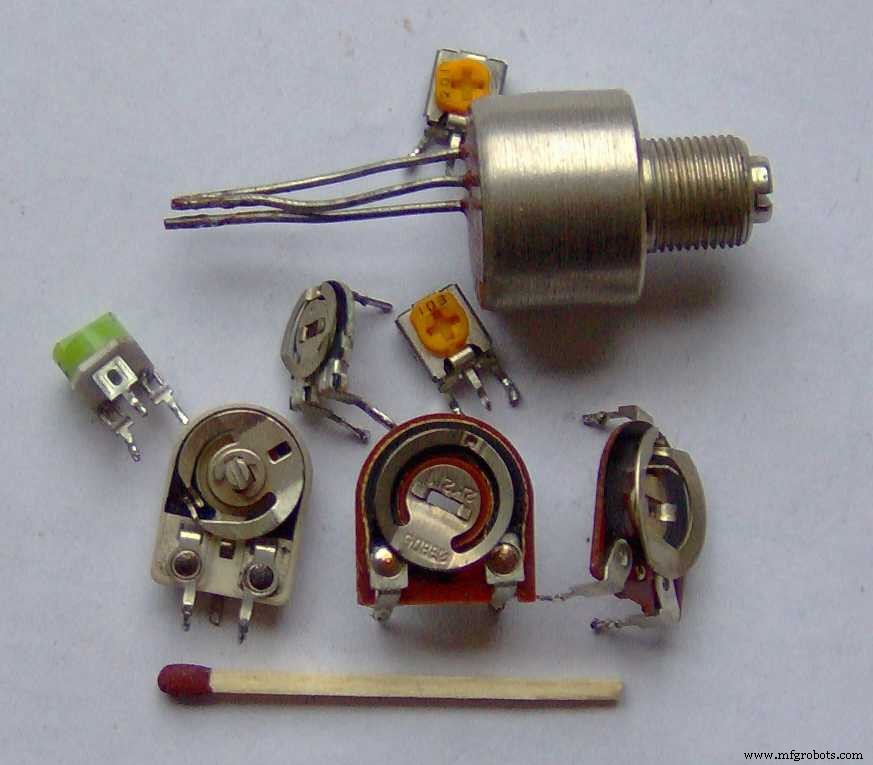
Conjunto de potenciômetros
Fonte:Wikimedia Commons
- Adaptador (5V 2A)
- Quadro de tela (tamanho A4)
- Fios de sinal

Fios de Sinal
Com isso em mente, você pode continuar a construir seu projeto de braço robótico simples nas seguintes etapas:
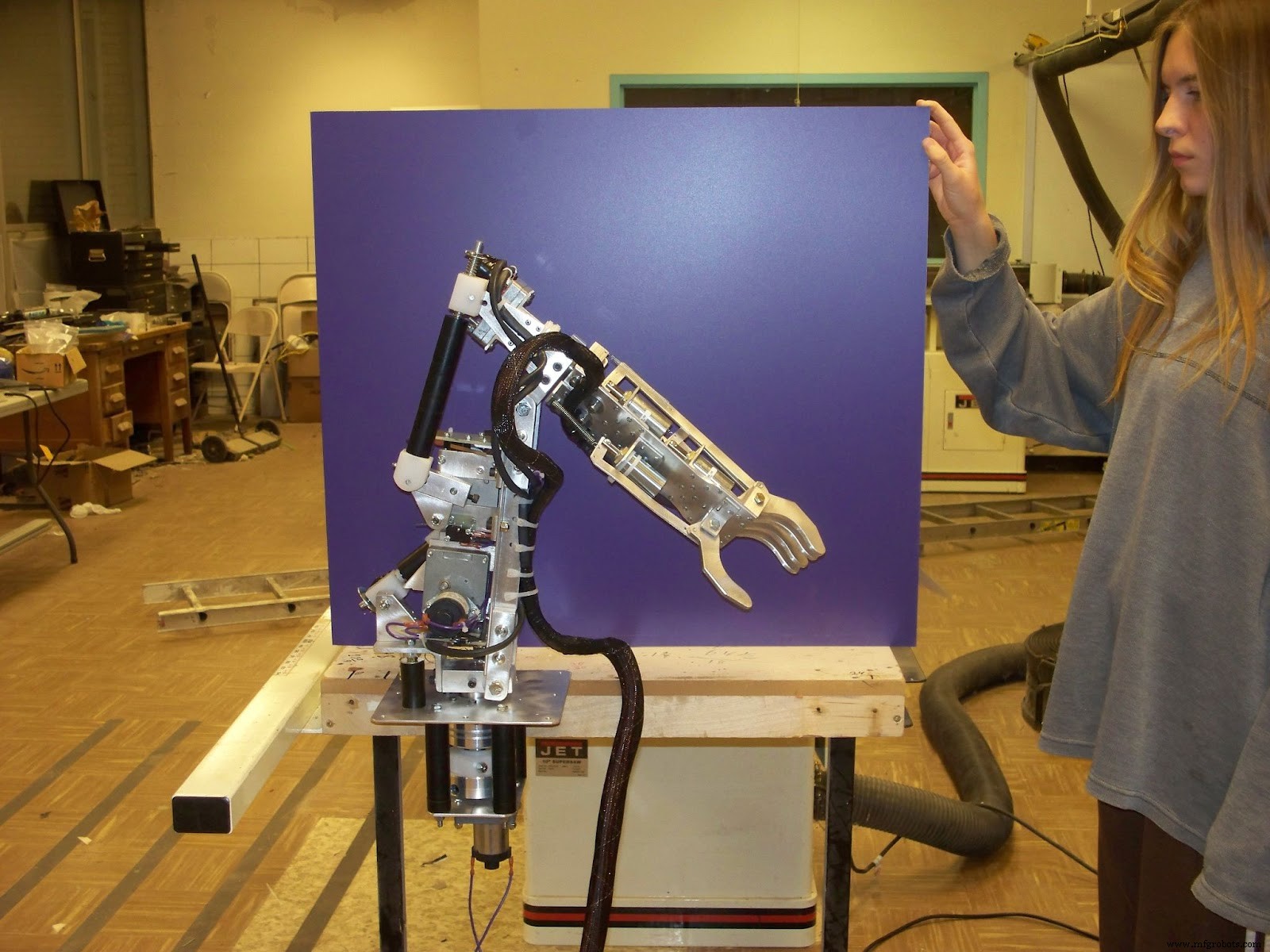
Braço robótico no trabalho
Etapa 1- Comece a juntar as peças
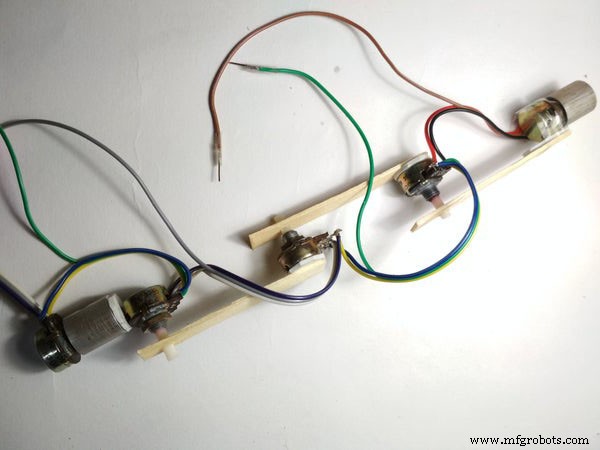
Pedaços de madeira de picolé conectados ao potenciômetro
Fonte:Instructable
O primeiro passo é pegar um pedaço de madeira pequeno e estável para criar o braço. Enquanto estiver, opte por qualquer projeto mecânico de sua preferência. Em seguida, cole os servos na madeira com uma fita (dupla face). Depois disso, prenda os servos na madeira com parafusos.
Quanto ao braço principal, você pode fazê-lo anexando seus potenciômetros no pequeno pedaço de madeira. Você pode usar seu quadro de tela como base para montar sua configuração.
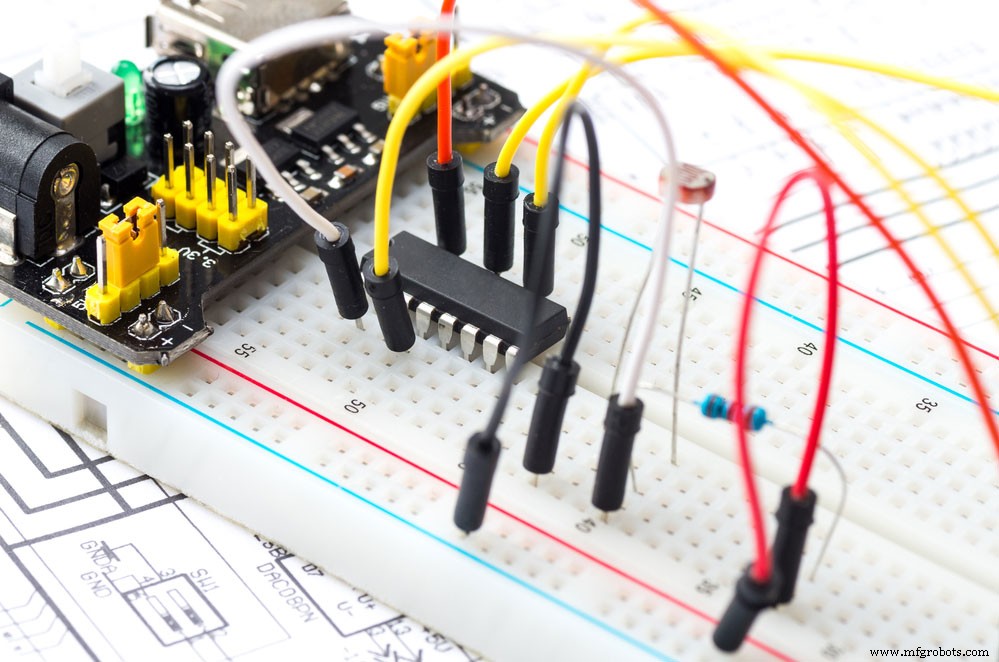
Etapa 2 – Conecte seus fios
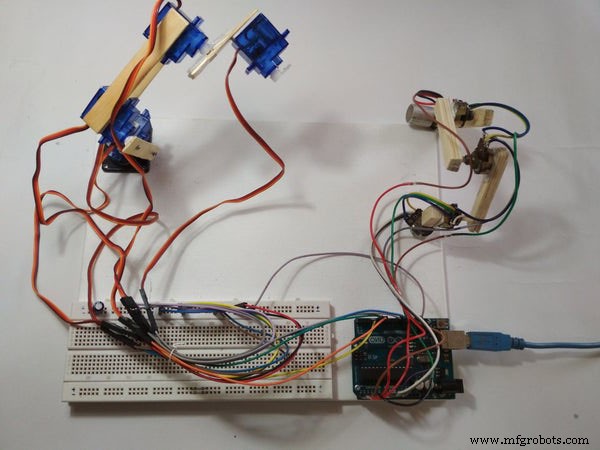
Conectando os fios e pedaços de madeira na placa de ensaio
Fonte:Instructable
O objetivo aqui é garantir que você conecte todos os seus fios corretamente. E o primeiro passo é pegar todos os seus servos. Em seguida, faça uma conexão paralela dos servos à fonte de alimentação. Ou seja, seu fio preto deve ir para Gnd enquanto o fio vermelho se conecta ao positivo.
Depois de ter isso, pegue seus fios de sinal (laranja ou amarelo) e conecte-o ao pino PWM do Arduino. Com isso, você pode prosseguir para conectar o Gnd do Arduino em paralelo. Além disso, você precisa conectar seus potenciômetros a +5V.
Depois, conecte seu terminal do meio ao pino analógico do Arduino. Dito isso, você pode regular os servos com pinos digitais como 10, 9, 6, 5 e 3. Além disso, você pode usar o A0 a A4 (pinos analógicos) para entrada de potenciômetros.
Além disso, o potenciômetro que se conecta ao A0 ajuda a regular o servo que se conecta ao pino 3. Além disso, o potenciômetro em A1 controla o servo que se conecta ao pino 5.
Sem dúvida, o Arduino não alimenta os servos. Mas é vital garantir que você conecte o Arduino e o GND corretamente - para fazer o braço funcionar.
Etapa 3 – Tempo para codificar
O processo de codificação para este projeto é bastante simples. Assim, você pode começar armazenando os potenciômetros em uma matriz. Quando você obtiver os registros, prossiga para atravessá-lo com um loop for. Dessa forma, os servos irão lidar com as etapas.
Em outras palavras, você pode iniciar o processo declarando todas as variáveis importantes globalmente. Com isso, fica mais fácil entender e usar as variáveis em todo o programa.
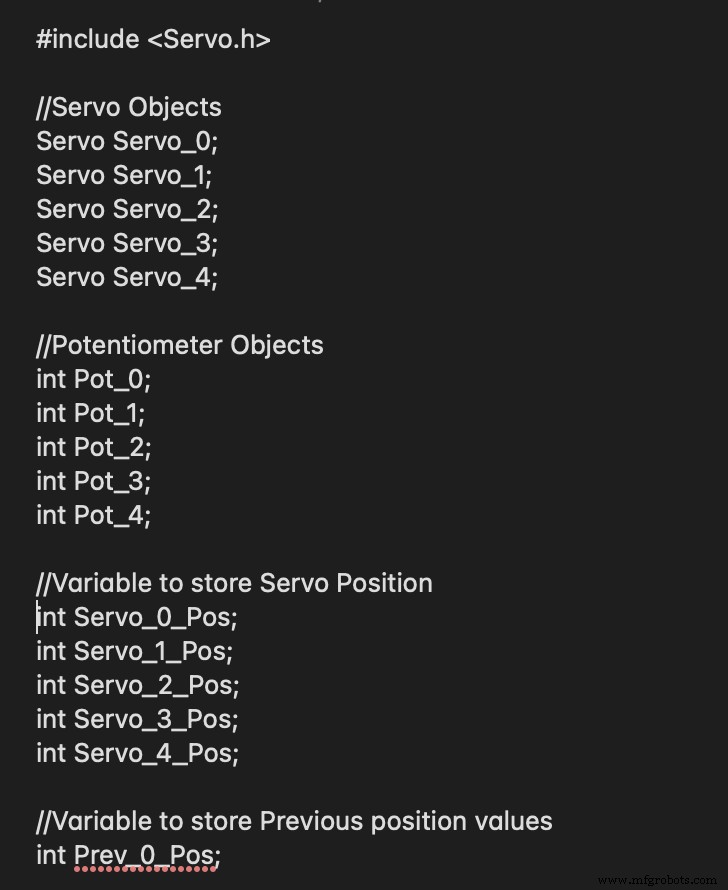
Depois disso, prossiga para a função principal que inicia a primeira execução. Assim, você criará uma função de configuração que destacará os pinos definidos e suas funções.
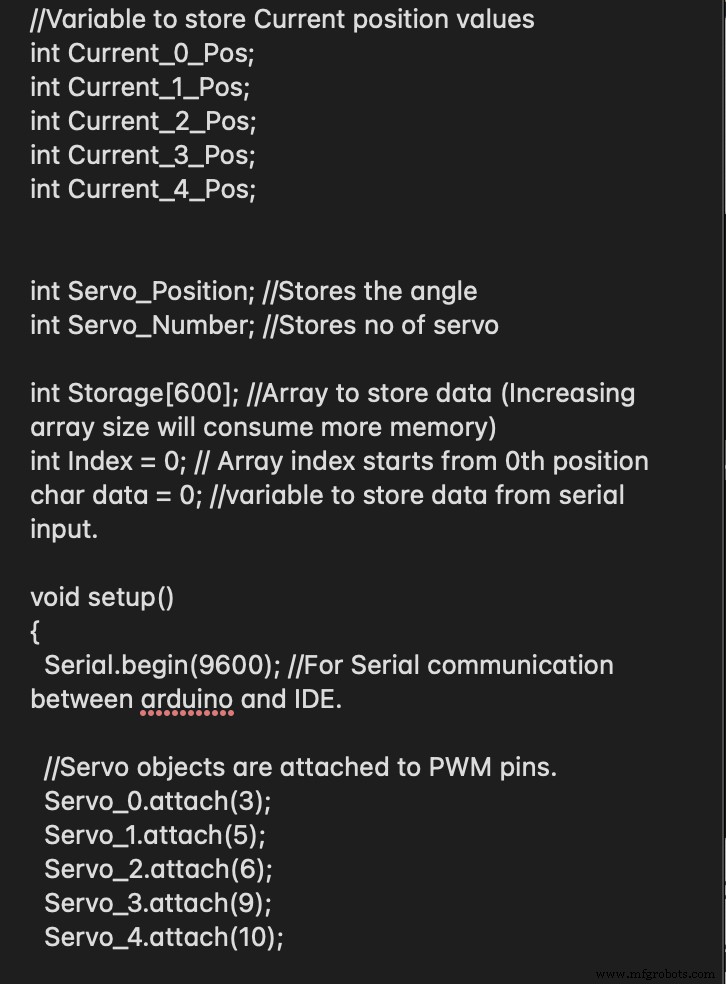
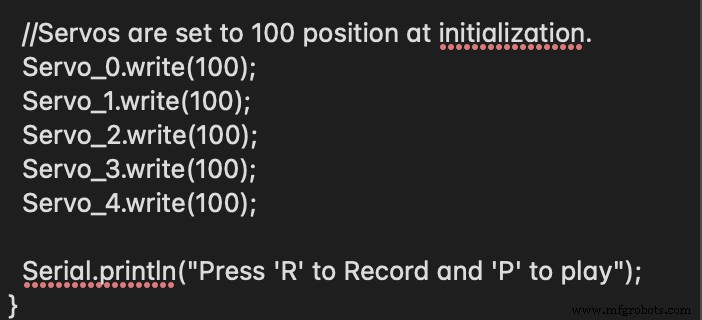
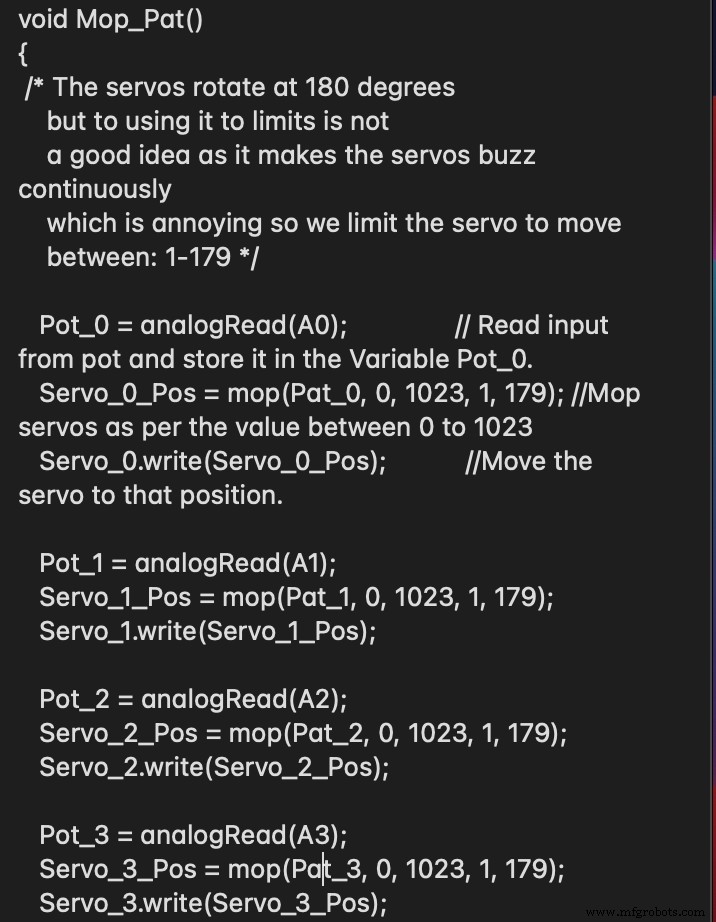
Quando você tiver isso, a próxima tarefa é usar os pinos de entrada analógica para obter os valores do potenciômetro. Além disso, os pinos de entrada analógica ajudam a mapear os valores - o que ajuda a regular os servos.
Agora, é hora de nomear a função definida pelo usuário. No código abaixo, escolhemos Mop_Pat;.
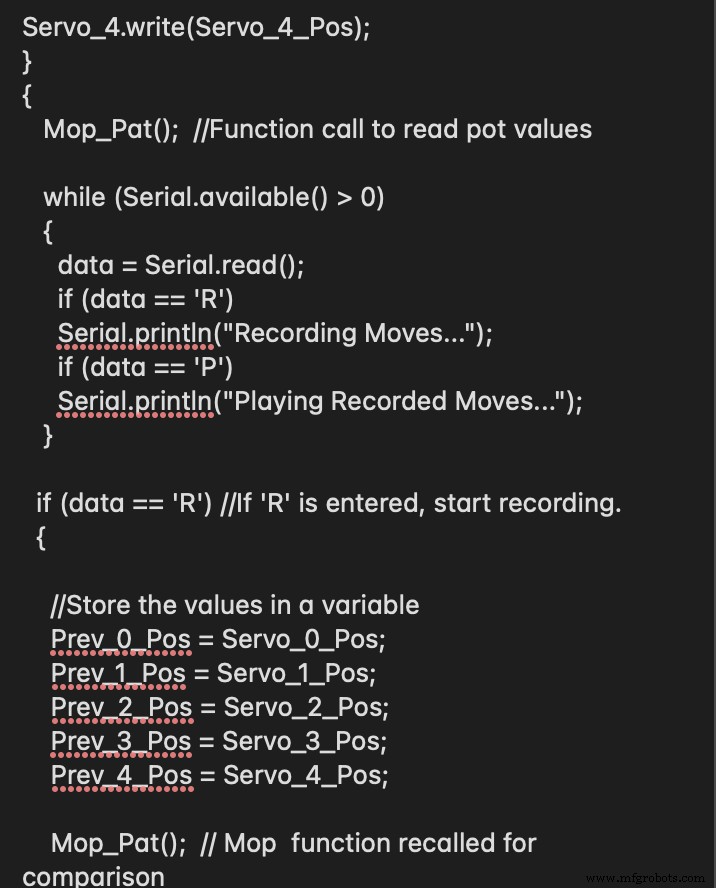
Com isso, você pode colocar a função de loop. Quando você terminar com o código, você pode transferi-lo para a placa Arduino.
Com isso no lugar, seu braço robótico funcionará. Além disso, você pode fazer alguns ajustes com o código quando necessário para uma operação mais suave.
Etapa 4 – Teste
Ao terminar de transferir o código para a placa, vá para a opção Ferramentas. Nesta opção, vá para “Serial Monitor”. Ao clicar nesta função, ela o ajudará a redefinir o Arduino. E permite que você use o braço mestre para controlar facilmente o braço robótico. No entanto, neste momento você não pode gravar nenhum movimento.
Então, você tem que digitar “R” no monitor – para gravar todos os movimentos. Quando tiver registrado todos os seus movimentos, digite “P”. Esta função ajuda a reproduzir todos os movimentos. E a melhor parte é que os servos continuarão executando os movimentos - contanto que você não reinicie a placa.
Outras ideias de projeto de braço robótico Arduino
Se você acha que o projeto acima é muito básico, sinta-se à vontade para experimentar outras ideias de projetos de robótica de braço Arduino, como:
O braço robótico com controle por gestos (Arduino + Kinect)
Braço robótico controlado por gestos de mão
Fonte:Wikimedia Commons
Este projeto envolve a direção de um braço robótico com gestos. E você pode capturar os gestos com um sensor Kinect. Assim, os engenheiros desenvolveram o braço robótico para imitar o movimento do cotovelo, braço direito, mão e cotovelo. Além disso, eles também criaram essa ferramenta com servomotores.
Um braço robótico controlado pela Web

Braço robótico controlado pela Web
O braço robótico controlado pela web é outra invenção notável. A ferramenta mostra a possibilidade de coordenar o braço robô com um servidor web. Curiosamente, uma fonte externa alimenta este dispositivo e usa cerca de seis servomotores.
Portanto, para fazer isso, você precisa estudar seu fluxo de trabalho, anotar o código-fonte e entender a arquitetura do sistema.
Braço Robótico Arduino Controlado Nunchuck
Esta ideia de projeto destaca-se pela sua singularidade. Com este projeto, você aprenderá a usar um Arduino Mega para programar o dispositivo e montar um robô de braço de forma eficaz. Além disso, você pode usar o Nintendo Nunchuk para controlar essa ferramenta.
E a melhor parte é que o Nunchuk tem muitos sensores. Além disso, está prontamente disponível e barato. Portanto, se você deseja construir este braço robótico, é crucial obter uma lista das ferramentas necessárias e o código.
Braço robótico Arduino controlado por aplicativo Android

Braço robótico na linha de produção
Este braço robótico é outro projeto de tarefas que você pode escolher. O dispositivo utiliza um módulo Bluetooth ao lado do Arduino por meio de um aplicativo Android. Dito isso, algumas das ferramentas necessárias para construir este braço robótico incluem um motor genérico que possui um módulo Bluetooth (HC-05) e um Arduino mega 2560.
A mão robótica controlada sem fio
Escolher este projeto é ideal se você quiser saber o que é preciso para construir uma mão robótica. Além disso, também ensina como controlar essa ferramenta. Além disso, você precisará de ferramentas como o sensor relacionado, baterias, placa Arduino e servo motor para construir esta mão robótica com uma luva sem fio.
O Braço Robô Arduino Bartender

Braço robótico Arduino Bartender
Fonte:WorldArchitecture
O braço robótico Bartender é o projeto a seguir se você estiver procurando por um projeto divertido que impressione os convidados. Esta ferramenta geralmente possui um RobotGeek Snapper Arm. Além disso, possui um injetor de válvula - que aumenta sua função de bartender. Portanto, este projeto fará um bom trabalho movendo bebidas para o seu copo de um recipiente.
Braço robótico Arduino controlado por mouse de computador
Este projeto é ideal se você ama um projeto de braço Arduino que você pode controlar com o mouse do computador. A melhor parte é que este braço robótico Arduino pode tomar sua decisão processando imagens. Como? A ferramenta faz isso com o auxílio do software de visão Matlab.
Palavras finais
O projeto do braço robótico está rapidamente se tornando uma coisa no mundo. E é gratificante ver esses dispositivos transportarem itens, equilibrando e empilhando coisas com precisão - com base no tipo. E eles são úteis para aplicações médicas e exploração espacial.

Braço robótico na fábrica
Portanto, é um excelente momento para criar a versão barata dessa ferramenta, especialmente se você não quiser lidar com nenhuma tarefa recorrente. Você precisa de ajuda para começar? Sinta-se livre para nos contatar.
IRF3205:um guia através da folha de dados N-Channel MOSFET
Transistor saturado:o que é e como identificar um
Tecnologia industrial
- Makerarm:Um braço robótico mega-legal para fabricantes
- O guia passo a passo do líder de manufatura para direcionar o tráfego do site
- Braço robótico:como é feito?
- O que é um manipulador robótico? Um guia
- O guia definitivo para paletizadores robóticos
- Braço Robótico Hidráulico na Indústria de Manufatura:Um Guia Definitivo
- Arduino 3D-Printed Robotic Arm
- Mercado de braços robóticos crescerá para US$ 14,78 bilhões até 2026
- Módulo RTC:o guia absoluto para um projeto fácil
- O braço robótico industrial - um boom de fabricação