


Robô de escolha e posicionamento controlado por Bluetooth
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Ferramentas e máquinas necessárias
 |
|
Aplicativos e serviços online
 |
| |||
 |
|
Sobre este projeto
Introdução
Este tutorial demonstra como construir um robô pick and place controlado com seu smartphone Android. Construímos um aplicativo móvel usando a plataforma MIT App Inventor. Neste tutorial, falaremos sobre cada parte deste projeto separadamente. Nós vamos falar sobre:
- 1 Como controlar um servo motor
- 2 Como controlar um motor DC
- 3 Como usar o módulo Bluetooth
- 4 Como controlar seu robô com seu telefone celular
Espero que este tutorial cubra todas as suas necessidades para construir seu bot.
O cenário
Em primeiro lugar, devemos saber como o robô receberá ordens. Estamos usando um módulo Bluetooth que será conectado a um aplicativo móvel, que construiremos posteriormente. Por enquanto precisamos saber que enviaremos nosso comando ao robô com nosso celular usando a conexão Bluetooth.

Hardware
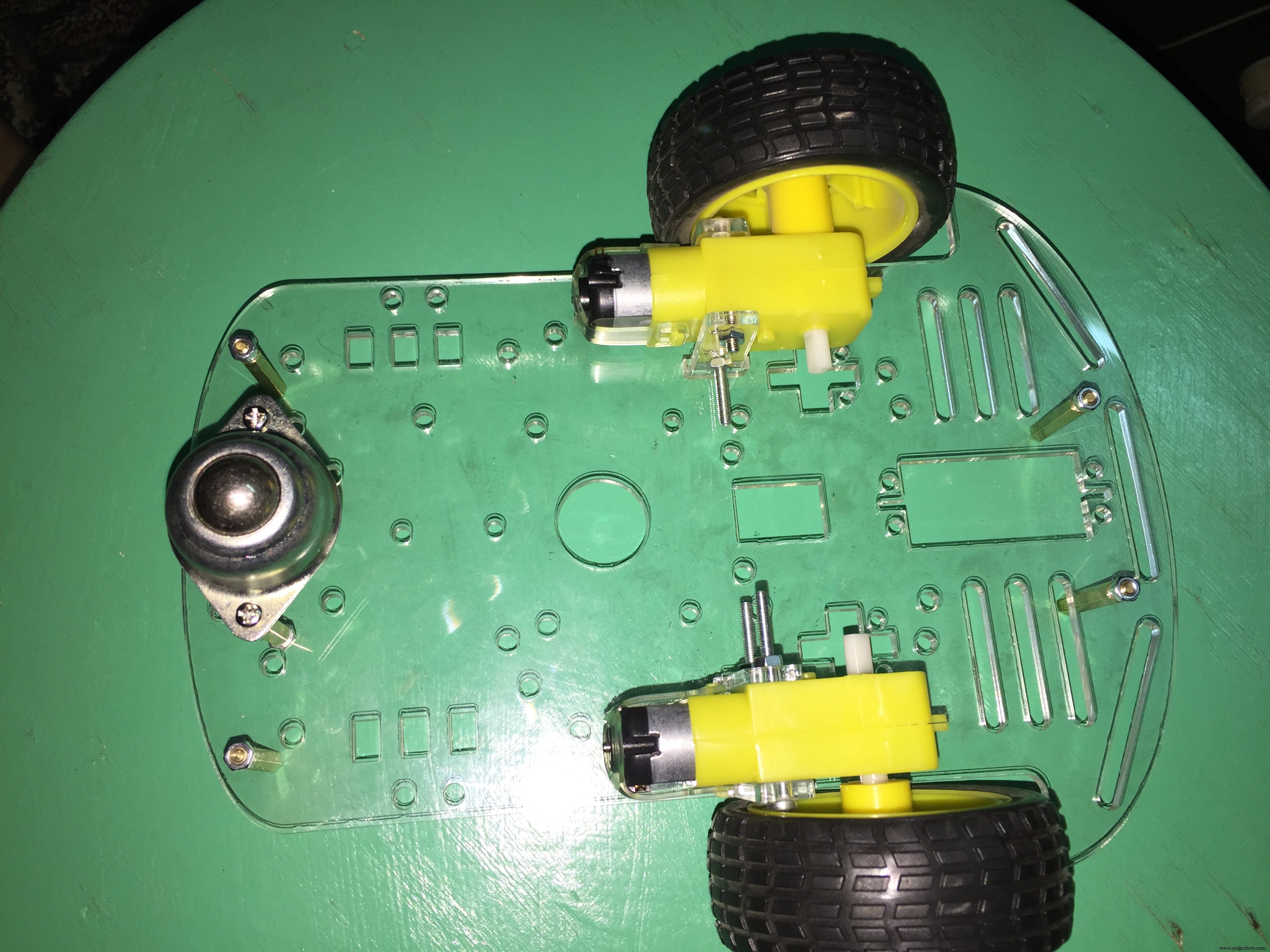
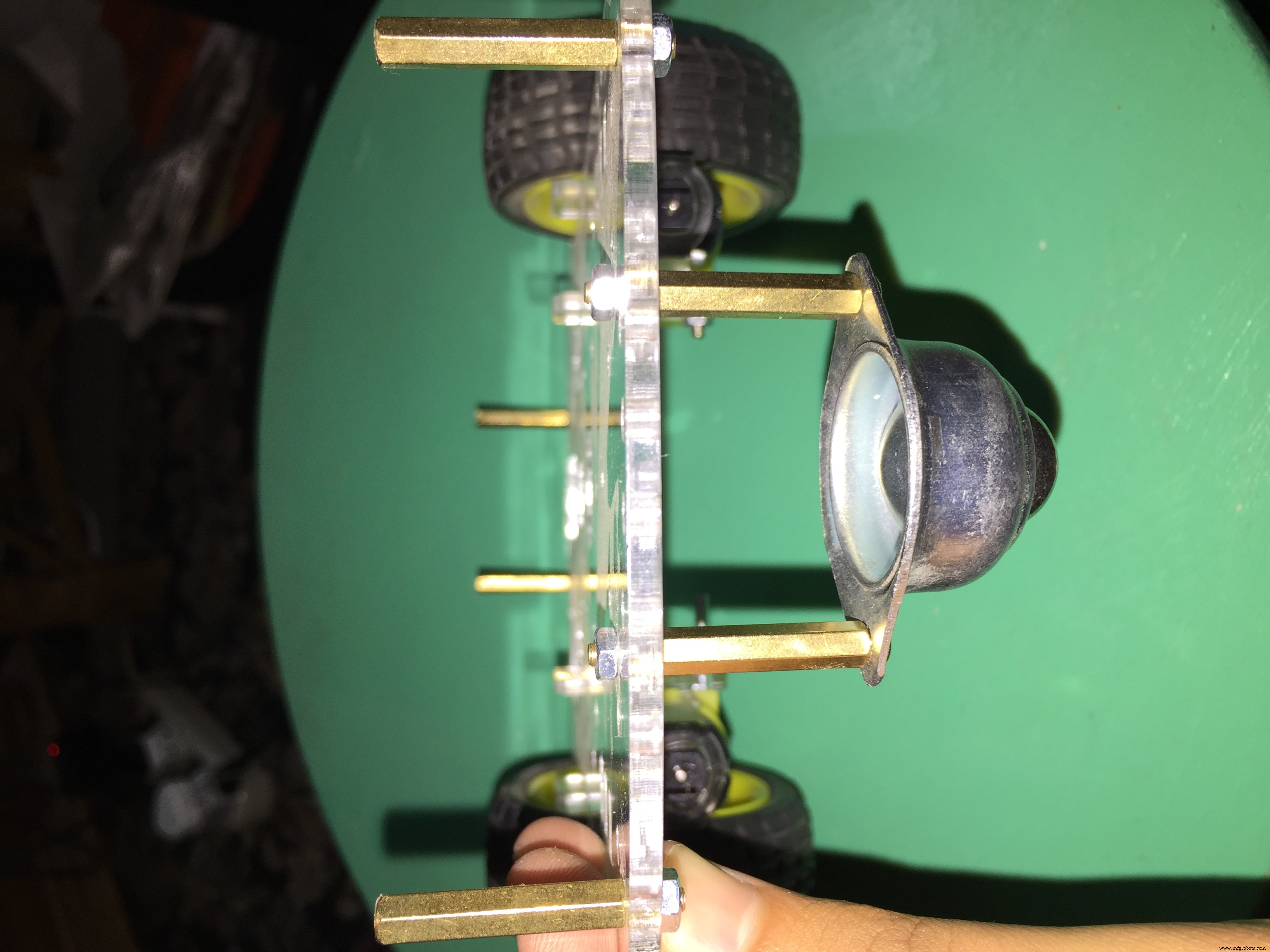
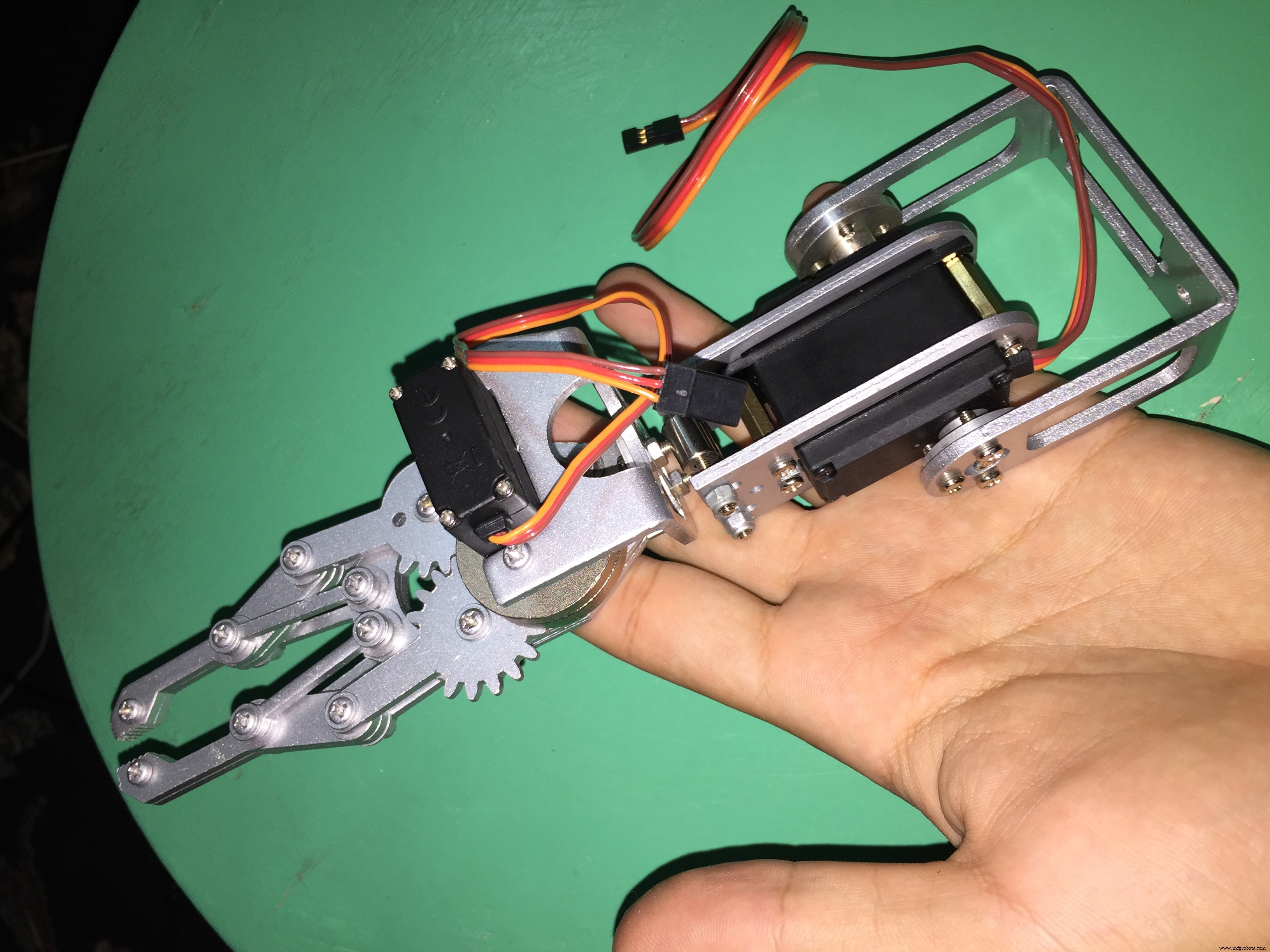
- O kit requer uma montagem simples, mas leva algum tempo. Siga as instruções incluídas com o seu kit para montagem,
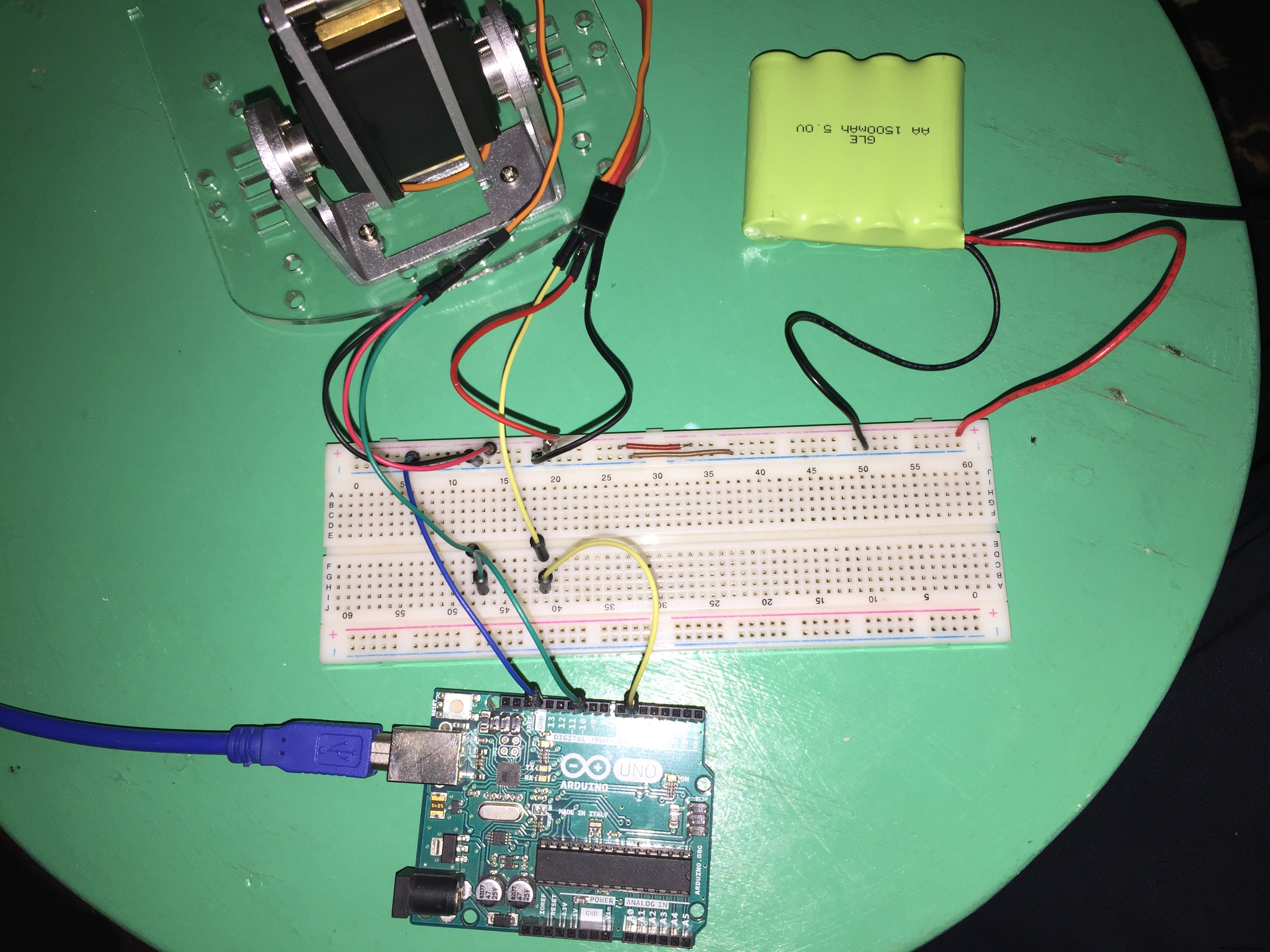
No final da montagem, deve ser semelhante a:
O Motor Shield permite que você converse com seus motores. Se você conectar os motores diretamente à placa Arduino, ele iniciará um incêndio! porque todo motor precisa de pelo menos 80MA, mas a corrente máxima que o pino digital do Arduino pode fornecer é 40MA, então NÃO tente conectar o motor diretamente à placa Arduino.
- A blindagem do motor ajuda você a controlar a direção de seu motor (por exemplo, mover-se para frente, para trás e soltar).
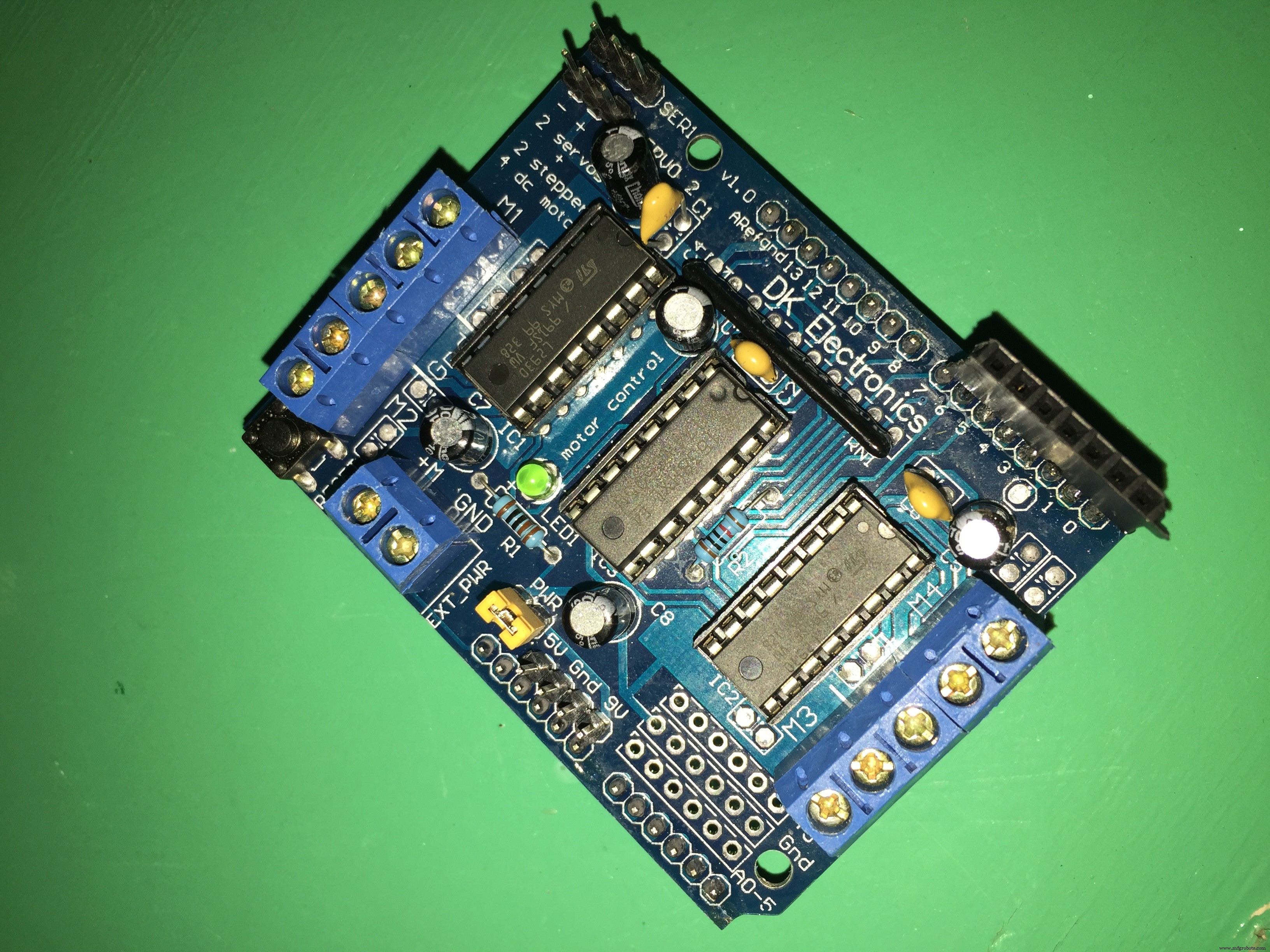
- A blindagem do motor permite que você controle até 4 DC bidirecionais motores com seleção individual de velocidade de 8 bits (portanto, resolução de cerca de 0,5%).
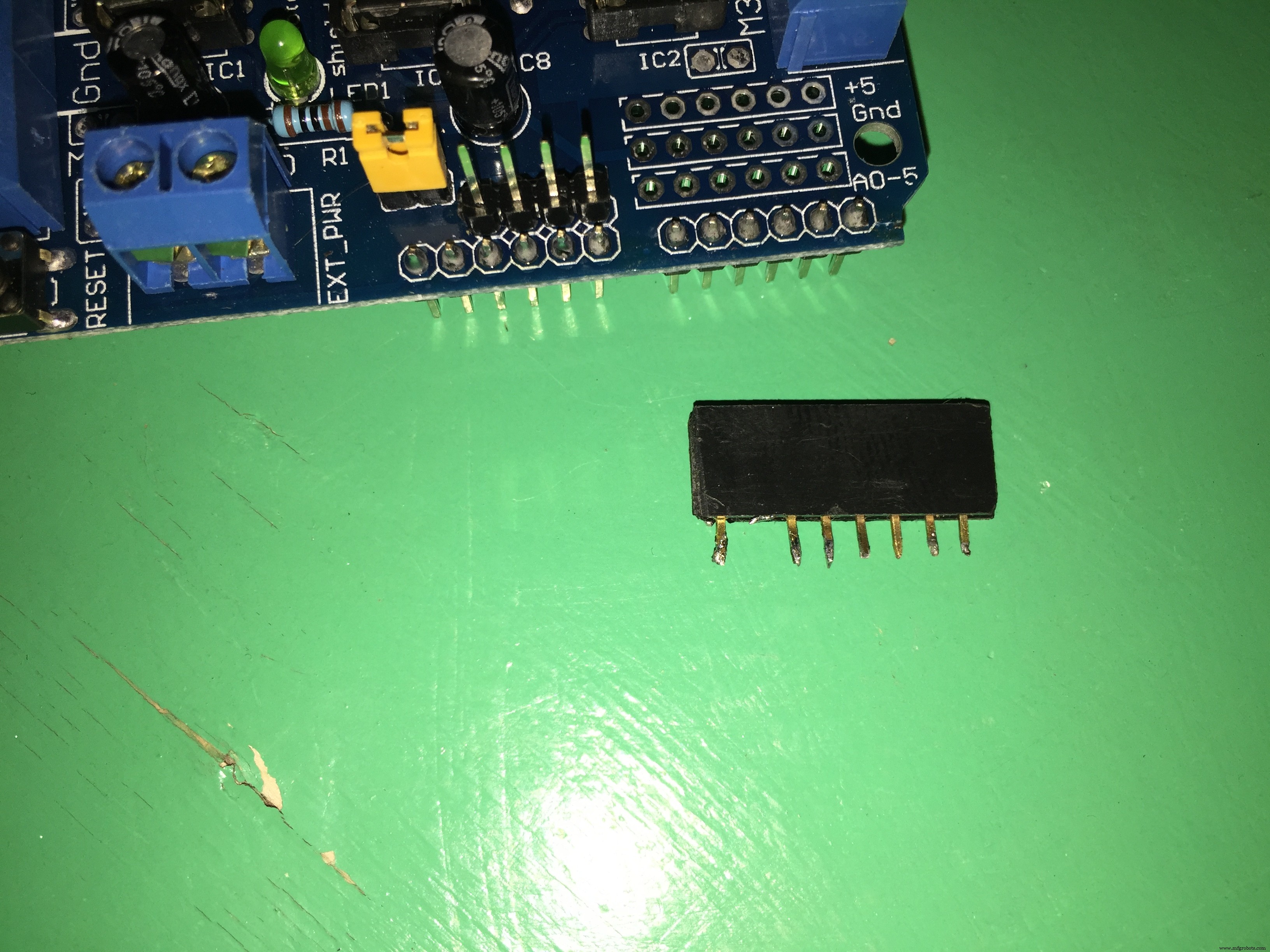
Você pode soldar alguns cabeçotes de pinos na parte superior da blindagem para poder usar os pinos do Arduino.

Você precisa colocar a blindagem do motor acima da placa Arduino assim:
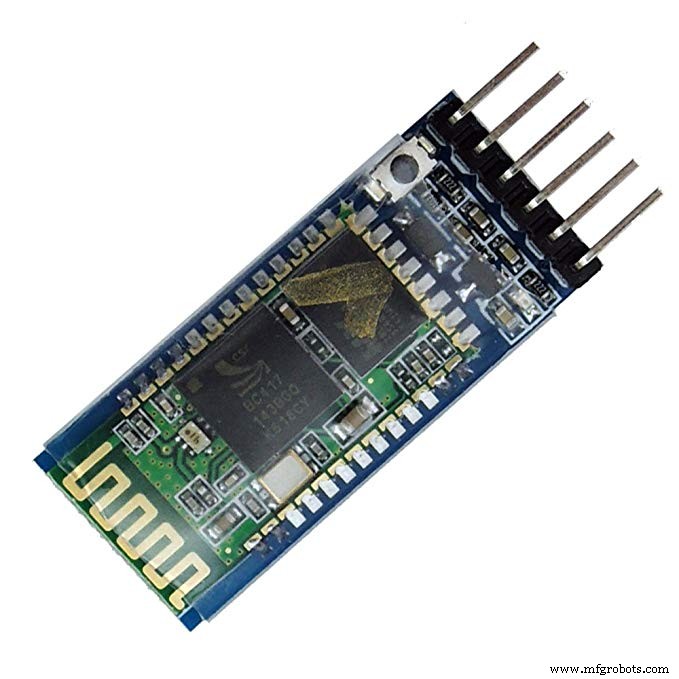
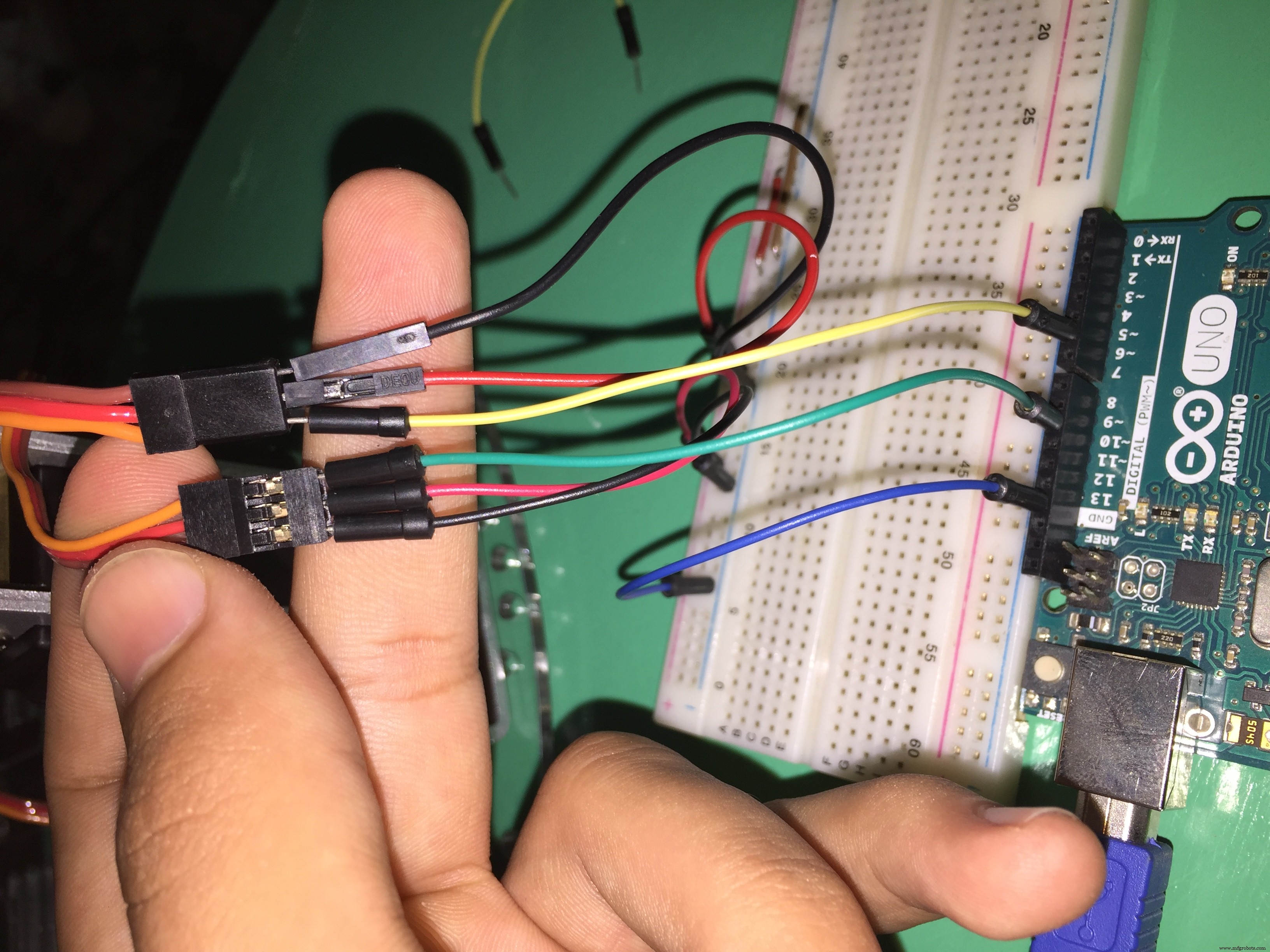
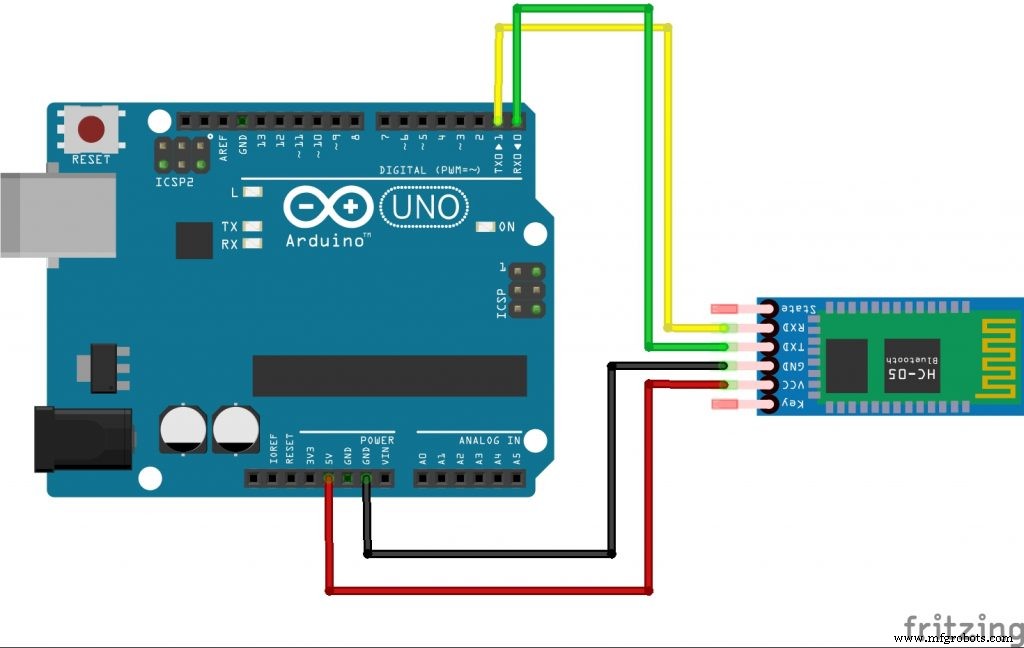
O módulo Bluetooth :é o canal entre o piloto e o robô para enviar ordens e realizar ações.
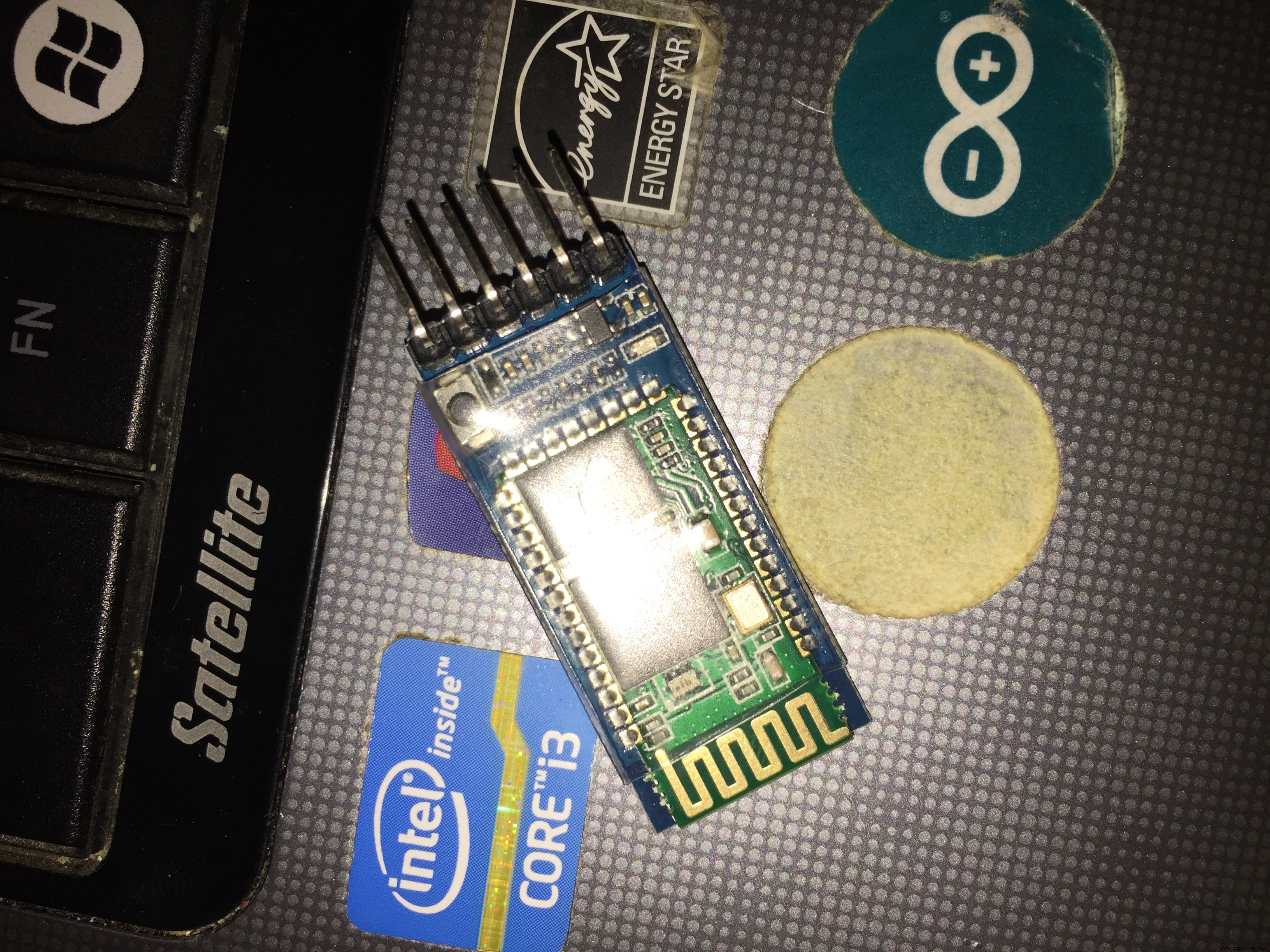
Possui 6 pinos; usaremos apenas os quatro pinos do meio (RX-TX-GND- + 5):

Vamos conectar:
- +5 no módulo Bluetooth para 5v no Arduino
- GND no módulo Bluetooth para o GND no Arduino
- Rx no módulo Bluetooth para o Tx no Arduino
- Tx no módulo Bluetooth para o Rx no Arduino

NOTA:POR QUE Rx para Tx e Tx para Rx?
Porque o módulo Bluetooth envia dados (Tx) e o Arduino recebe esses dados (Rx).
Um envia e o outro recebe
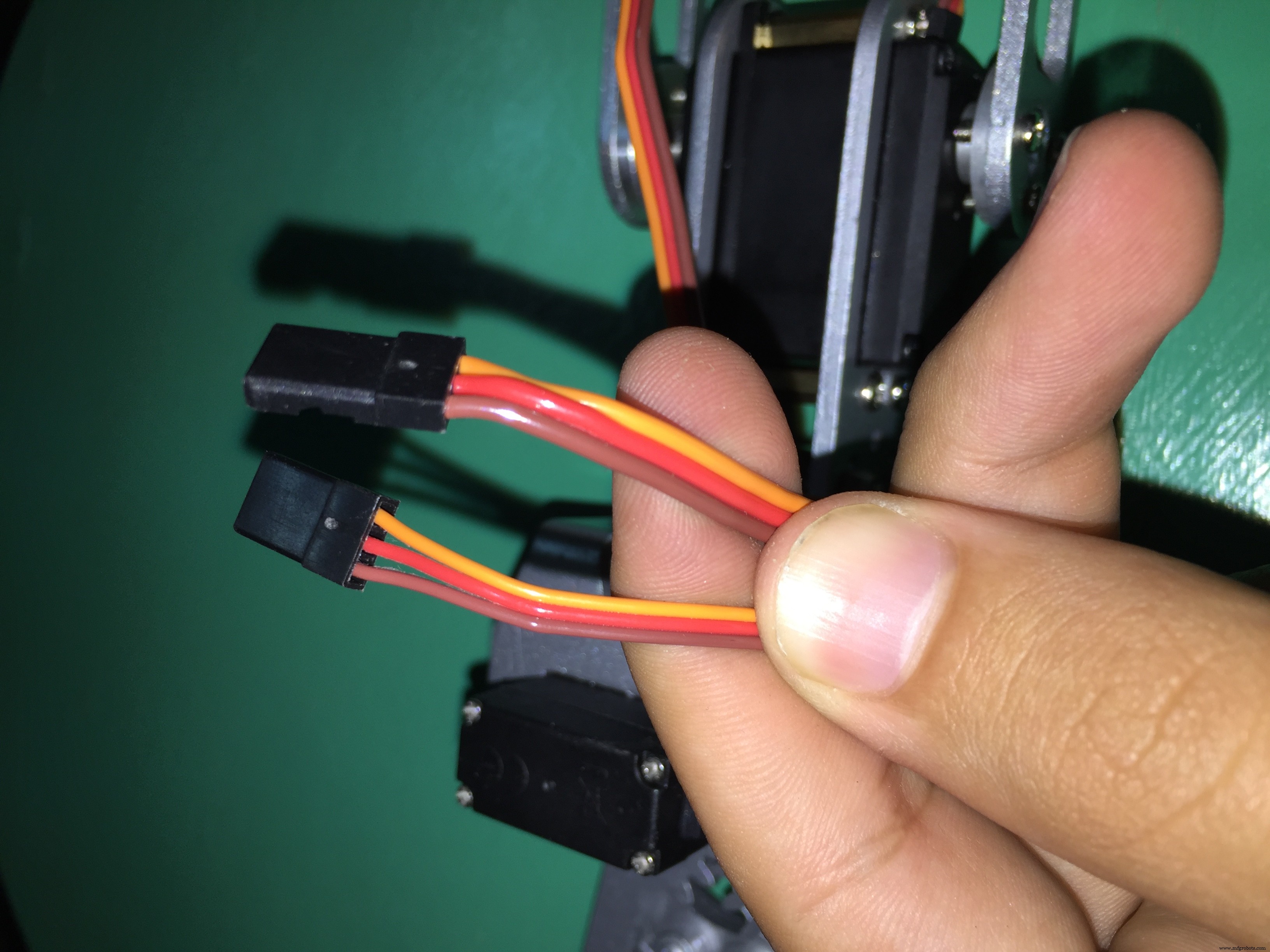
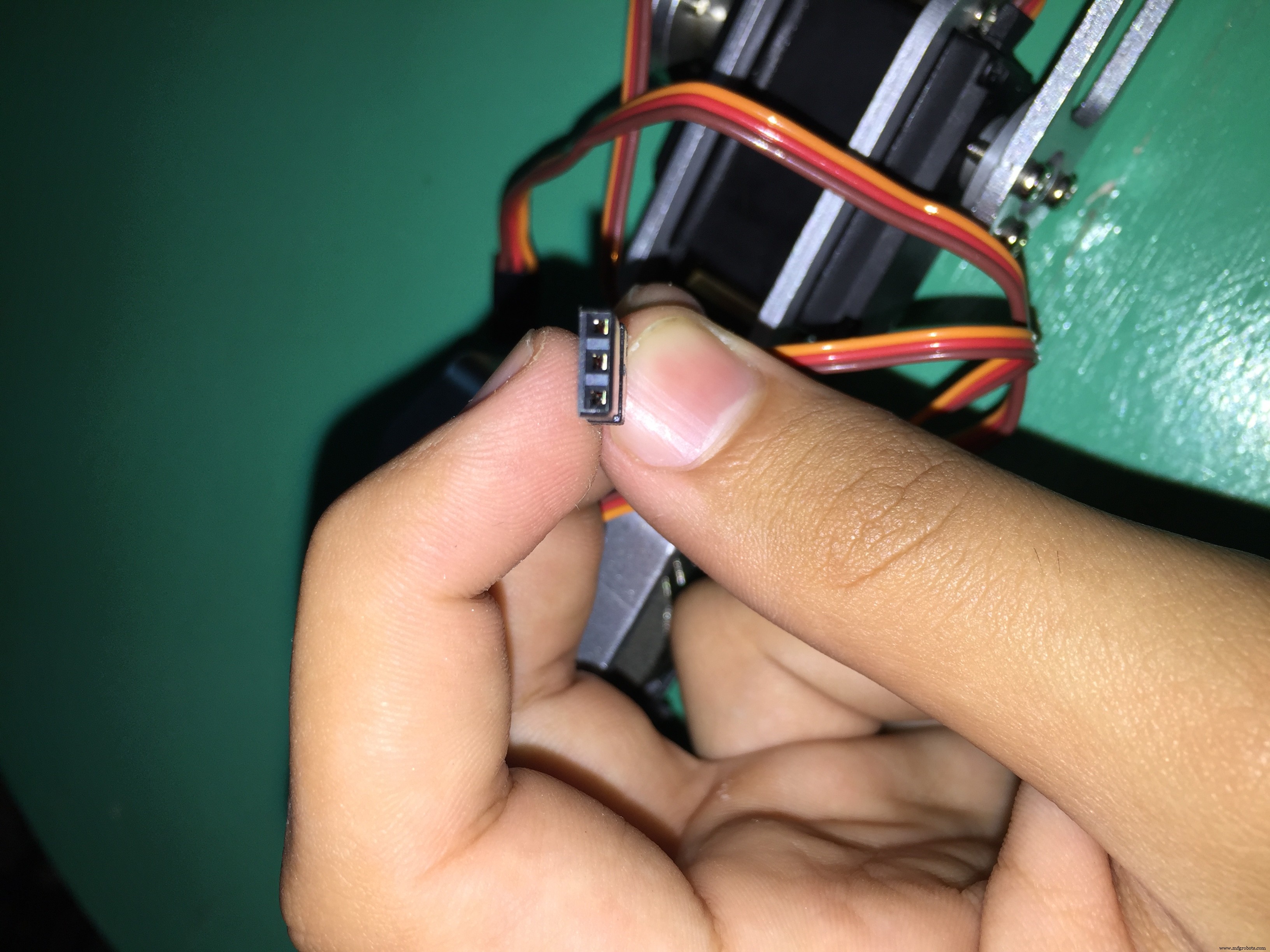
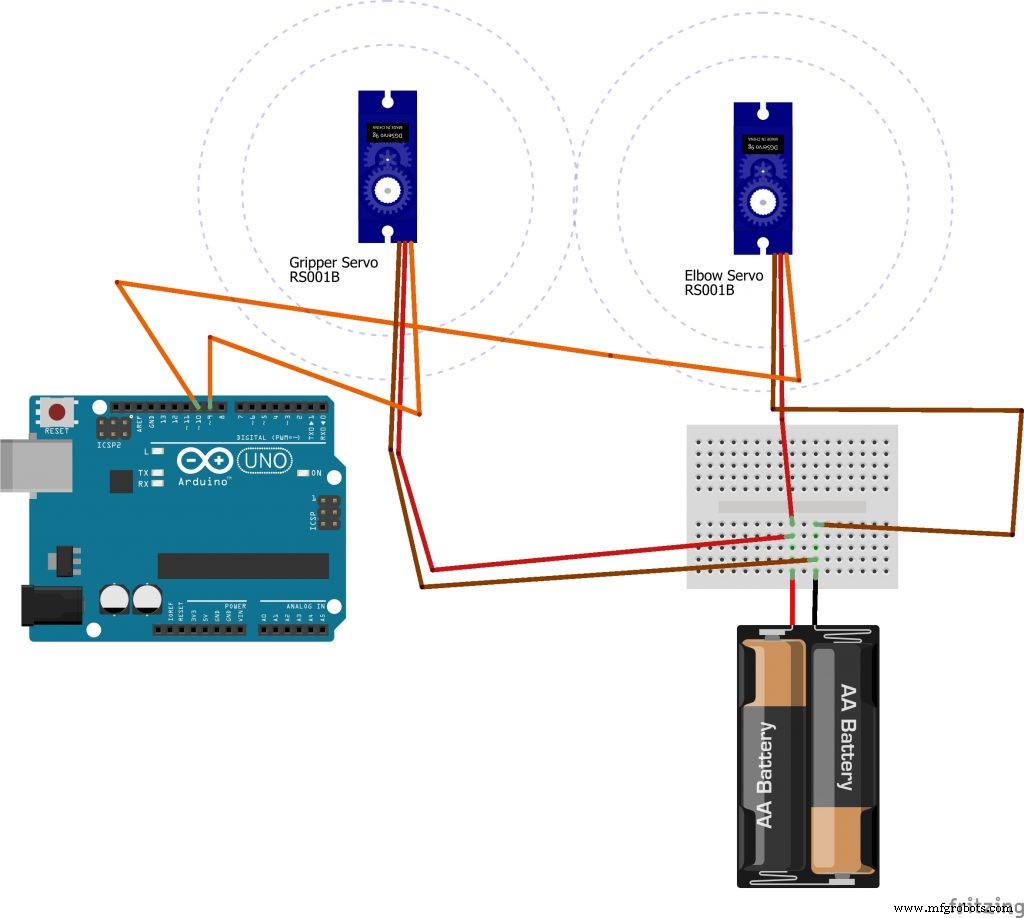
4) O Servo Motor possui 3 fios:vermelho (Positivo), marrom (Negativo), amarelo ou laranja (Sinal).
Nota:FAÇA NÃO conecte o Positivo e o Negativo dos Servo Motores aos 5V e GND da placa Arduino. A placa Arduino irá iniciar um incêndio devido à alta corrente absorvida pelos motores; usar o bateria externa.
- O fio vermelho para o positivo da bateria externa
- O fio marrom para o negativo da bateria externa
- O fio laranja para qualquer pino digital (PWN) no Arduino
NOTA:Não se esqueça de tornar o GND da bateria e o GND do Arduino um comum, faça-o conectando cada GND entre si.
5) Os motores DC
Você precisa soldar alguns fios nos terminais do motor para poder usar esses motores.
O motor DC não tem polaridade. Não há positivo nem negativo. Se você inverter as conexões do motor, a direção do movimento do motor mudará.

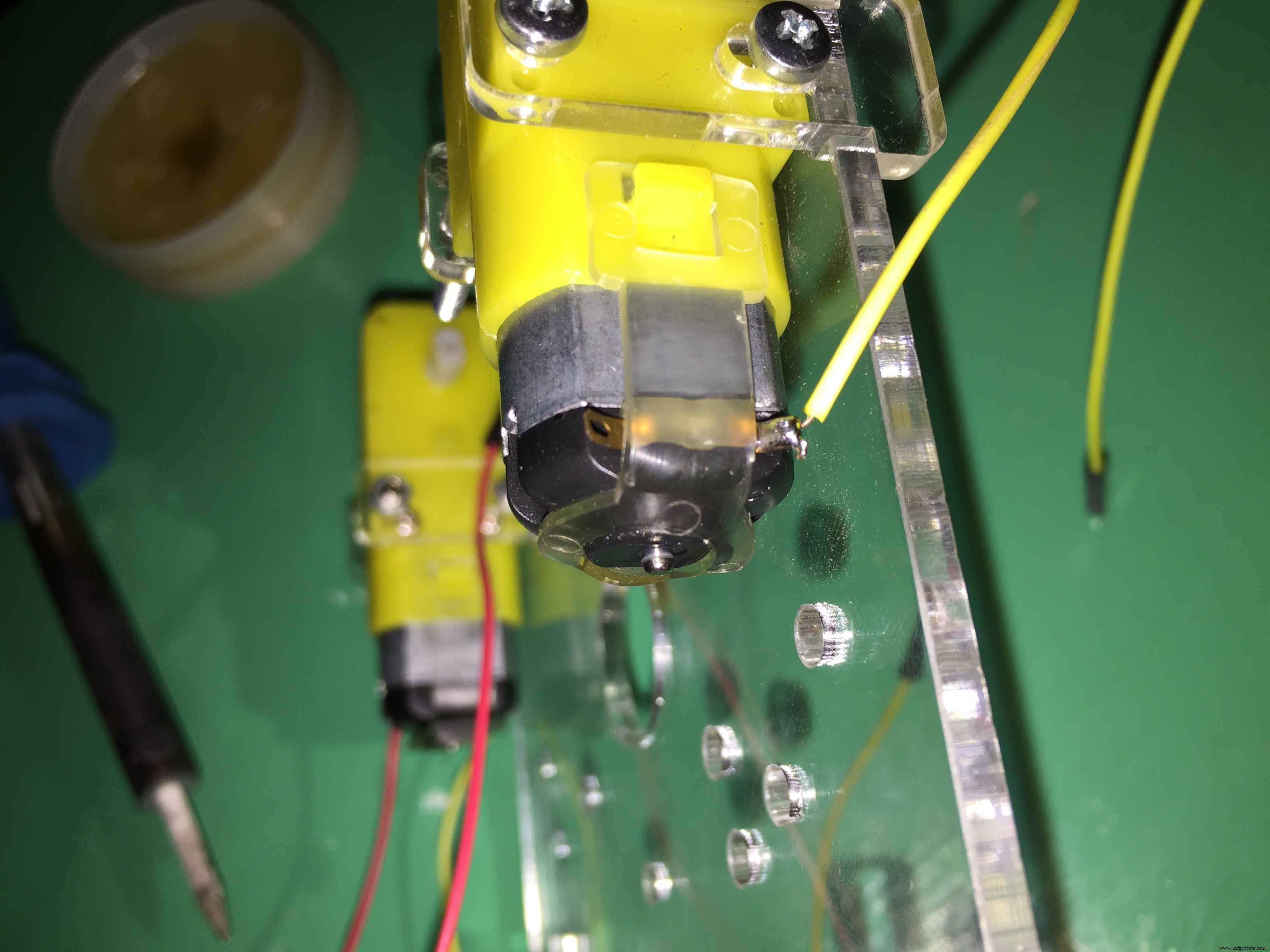
Depois de soldar os terminais do motor, conecte esses terminais à blindagem do motor.

NOTA:Em o código do Arduino, eu usado Motor 1 e Motor 2 - não Motor 3 e Motor 4.
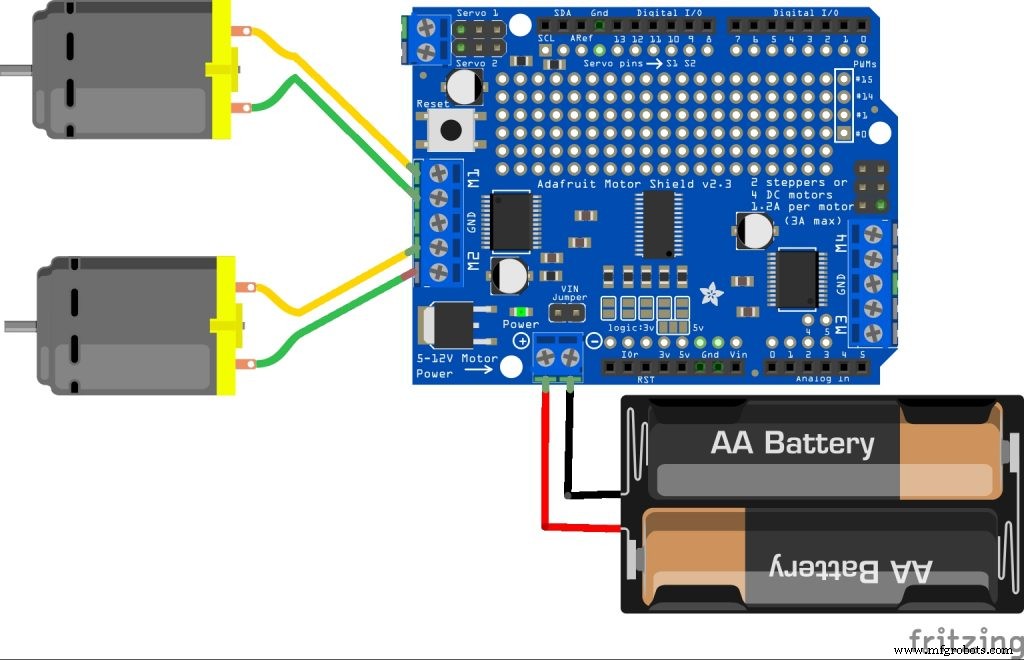
O Esquemático
Como conectar os motores do robô e a bateria com o driver do motor.
Como conectar os servo motores do braço e a bateria com a placa Arduino.
Como conectar o módulo bluetooth à placa Arduino.
NOTA:desconecte (remova o pino RED WIRE +5) do módulo bluetooth enquanto carrega o código para a placa Arduino. Em seguida, reconecte-o depois que o processo de upload for concluído.
Código
- Escolha e coloque o código do Arduino do robô
Escolha e coloque o código do Arduino do robô Arduino
#include#include AF_DCMotor motorR (1); AF_DCMotor motorL (2); Servo cotoveloServo; Servo gripperServo; comando int; void setup () {gripperServo.attach (9); elbowServo.attach (10); Serial.begin (9600); motorR.setSpeed (255); motorL.setSpeed (255);} void loop () {comando =Serial.read (); / * ARM Code * / if (command> =1 &&command <=180) // cotovelo servo mover de acordo com a posição do polegar no aplicativo mob entre 0 - 180. {ElbowServo.write (command);} else if ( comando ==205) // Movimento da garra para o ângulo 0 {gripperServo.write (0);} else if (comando ==206) // Movimentação da garra para o ângulo 90 {gripperServo.write (90); } else if (command ==207) // movimento da garra para o ângulo 180 {gripperServo.write (180);} / * CÓDIGO DO CARRO * / else if (comando ==200) {motorR.run (FORWARD); motorL.run (FORWARD);} else if (comando ==201) {motorR.run (FORWARD); motorL.run (PARA TRÁS); } else if (command ==202) {motorR.run (RELEASE); motorL.run (RELEASE); } else if (comando ==203) {motorR.run (BACKWARD); motorL.run (FORWARD); } else if (command ==204) {motorR.run (BACKWARD); motorL.run (PARA TRÁS); } else if (command ==0) {motorR.run (RELEASE); motorL.run (RELEASE); }}
Esquemas
Este aplicativo funciona apenas em telefones Android.Você deve ligar o Bluetooth antes de usar este aplicativo
antes de escolher o módulo Bluetooth do aplicativo, emparelhe seu celular com o módulo Bluetooth nas configurações do telefone ieee_aast_aswan_test1_xVVlPTtt8n.apk
Matriz de LED de rolagem 48 x 8 usando Arduino.
EmoPot - Um vaso que pode mostrar emoções às plantas
Processo de manufatura
- Robô Raspberry Pi controlado por Bluetooth
- Construa seu robô de streaming de vídeo controlado pela Internet com Arduino e Raspberry Pi
- Robô controlado por Wi-Fi usando Raspberry Pi
- Garras de injeção de combustível personalizadas para impressão em 3D para um robô de seleção e colocação
- Escolha e posicione fabricantes de robôs na Índia
- 10 principais fornecedores de robôs de seleção e colocação
- Como os robôs pick and place funcionam
- Pick and place – um exemplo perfeito de uso de robô com EasyWork
- Fabricação de robôs e baterias:uma conexão positiva
- Ferramentas de fim de braço:aplicações de coleta e colocação de robôs