


Robô de controle de gestos
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 |
Ferramentas e máquinas necessárias
 |
|
Sobre este projeto
O robô de controle por gestos é um dos tipos mais comuns de projetos feitos por amadores e alunos para entender e implementar o conhecimento de microcontroladores em um projeto físico e prático. O conceito por trás disso é simples:a orientação da palma da mão controla o movimento do carro robô. Como isso faz, você pergunta? Vamos decompô-lo.
Para obter um bom entendimento, avançaremos entendendo a função e a função de cada componente e, em seguida, combinando-os para atingir o desempenho desejado.
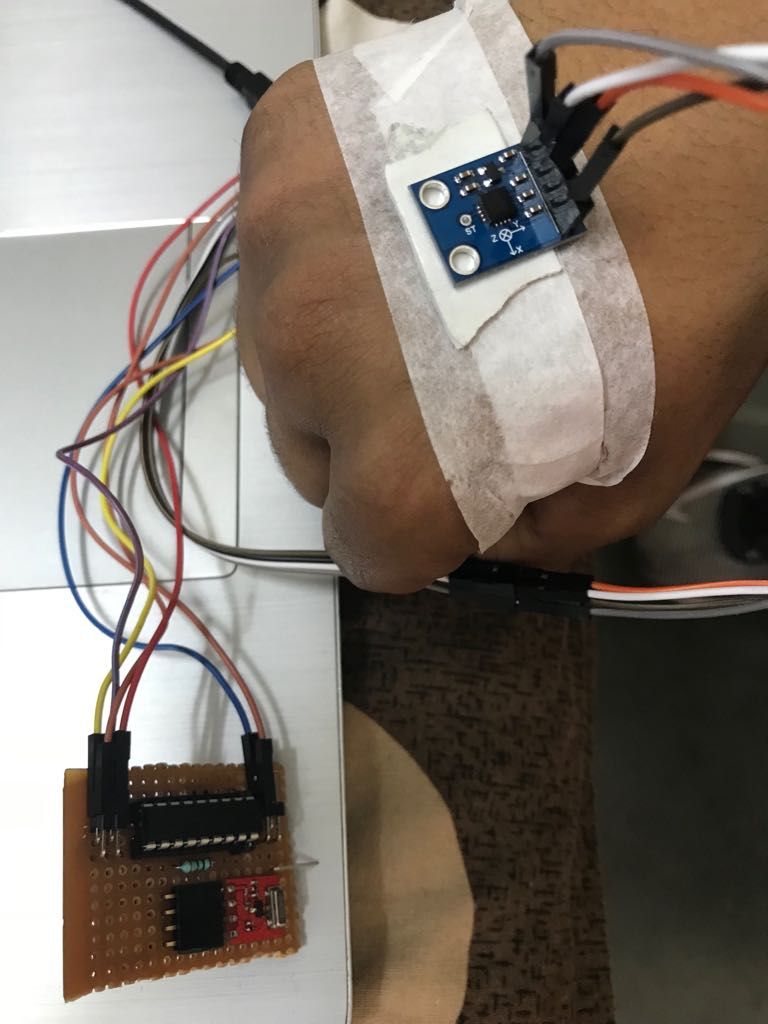
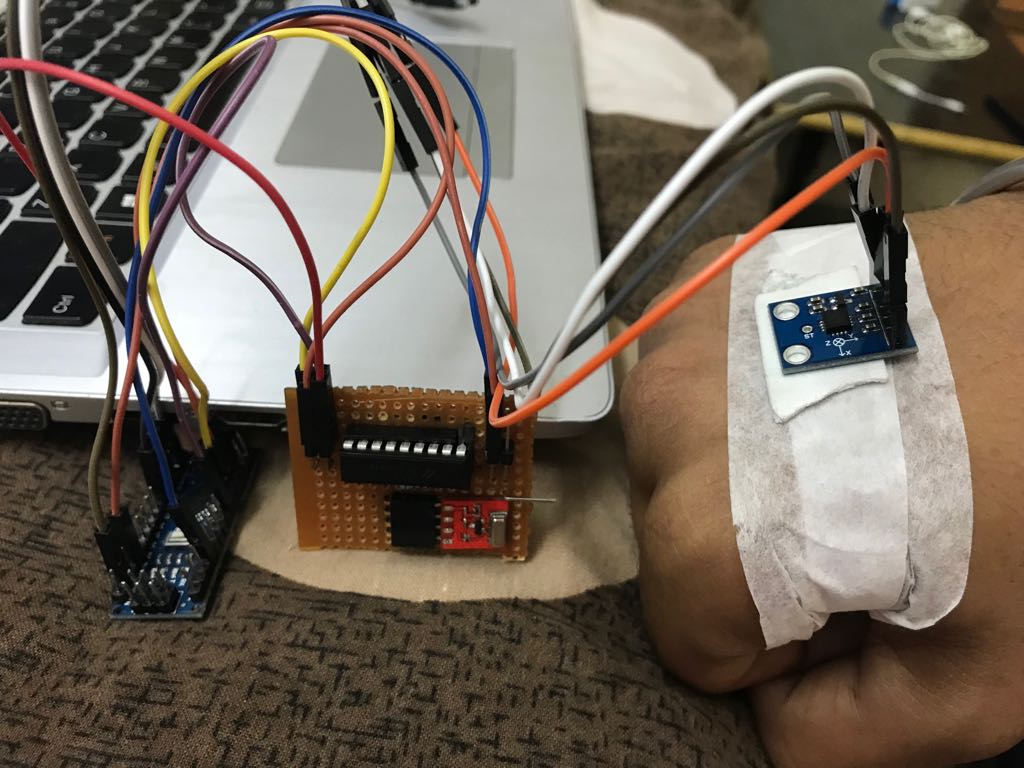
1. ADXL335 (Acelerômetro)
A função do acelerômetro é simples:detectar a orientação do pulso. O acelerômetro mede a aceleração, incluindo a aceleração devida à gravidade 'g' também. Assim, podemos usar o acelerômetro para detectar a orientação do pulso medindo o componente de 'g' em qualquer eixo específico de ADXL335, conforme mostrado na figura abaixo:
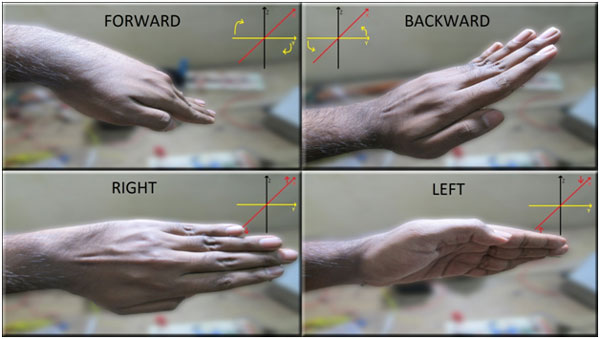
Devido à inclinação da mão, o ângulo do eixo X e / ou Y com mudanças verticais e, portanto, um componente de aceleração 'g' atua sobre eles também, que pode ser medido e, portanto, indica a orientação da mão.
O ADXL335 pode medir até 3g de aceleração e tem interface com o Arduino conectando seus pinos de eixo aos pinos analógicos do Arduino. O acelerômetro emite valores de tensão proporcionais à aceleração.
Neste projeto, o acelerômetro é conectado ao Arduino Nano e à palma da mão. O ADXL335 saídas de tensão na faixa de 0 a Vcc (tensão aplicada geralmente 3,3 V) e é lido pelos pinos analógicos do Arduino. Assim, para o usuário, obtemos um valor na faixa de 0 a 1024 (ADC de 10 bits). A orientação diferente produz um valor analógico diferente para cada eixo, que é então mapeado para diferentes movimentos do robô.
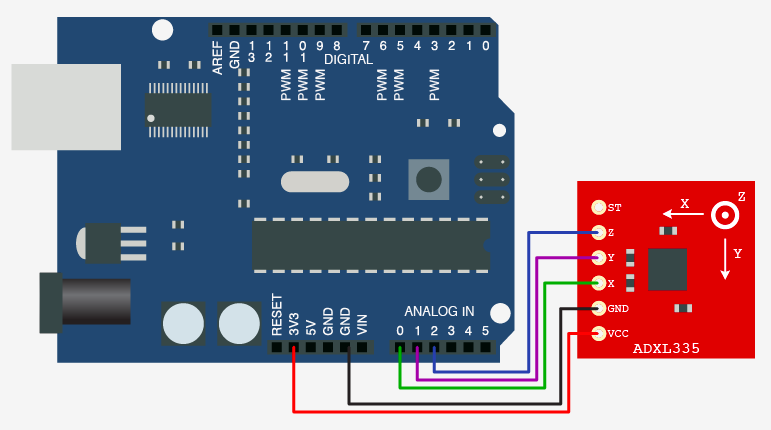
O diagrama do circuito para o acelerômetro é:
Um código de teste para entender o funcionamento do ADXL335 é o seguinte:
void setup () {pinMode (A0, INPUT); // eixo x está conectado a A0 pinMode (A1, INPUT); // o eixo y está conectado ao A1 pinMode (A2, INPUT); // eixo z está conectado a A2Serial.begin (9600); // Para imprimir dados no Monitor Serial} void loop () {Serial.print ("X ="); Serial.println (analogRead (A0)); Serial.print ("Y ="); Serial.println (analogRead (A1)); Serial.print ("Z ="); Serial.println (analogRead (A2)); atraso (1000);} Você pode executar este programa para ver quais valores você obtém para a inclinação para frente, para trás, para a esquerda e para a direita da palma da mão e do pulso, que serão usados finalmente para controlar o robô.
2. Transmissor e receptor RF-433
A função do módulo RF é simples:transmitir dados de comando do pulso do Arduino Nano para o motor que controla o Arduino Uno. O módulo RF usa ondas de rádio na freqüência de 433 Hz e, portanto, o nome RF-433. Eles usam a Modulação de Amplitude para enviar dados, mas não entrando em muitos detalhes técnicos e mantendo as coisas simples, eles serão usados para transmitir comandos ao robô, ou seja:avançar, retroceder, direita ou esquerda. E no caso de não haver dados, fique parado. Eles funcionam bem em até 10 metros de alcance.
Agora, para entender como implementar o módulo RF em nosso projeto, vamos trabalhar nos circuitos transmissor e receptor sequencialmente.
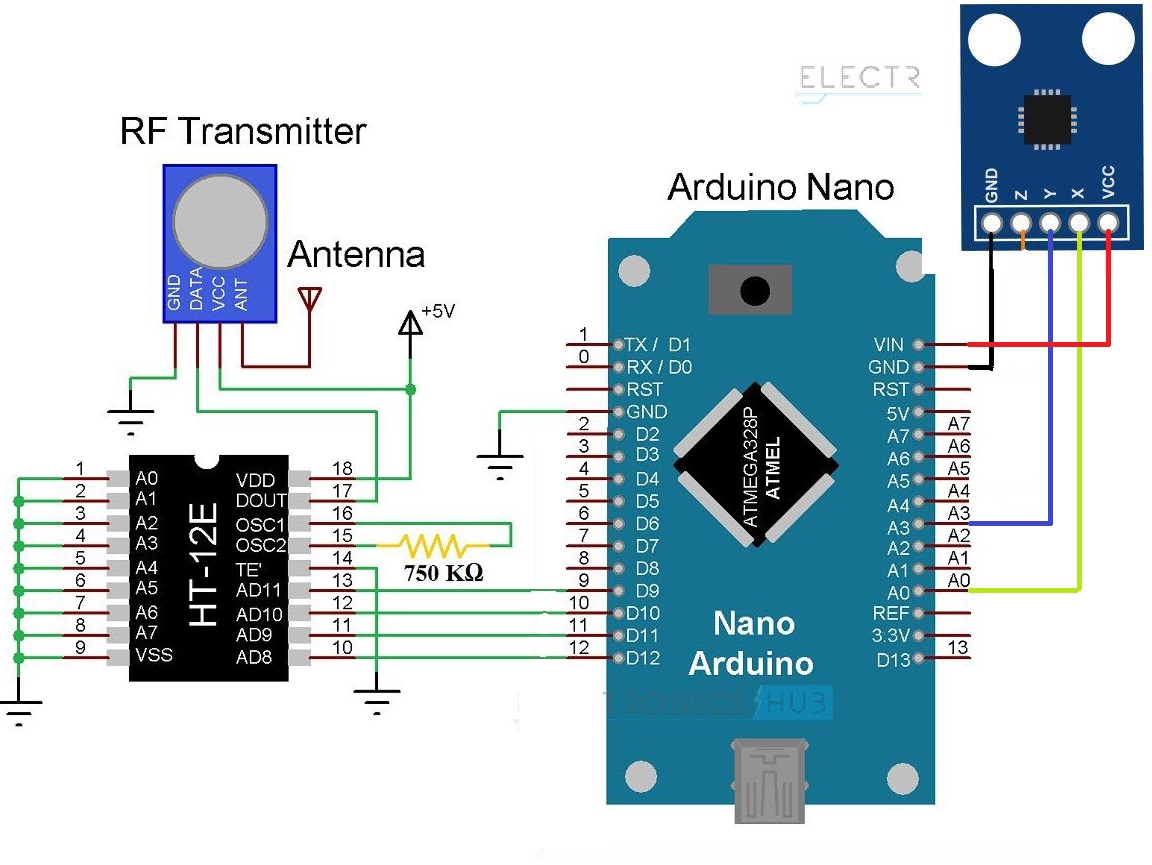
Circuito do transmissor
O circuito do transmissor consiste em duas partes:o Transmissor RF e o Codificador HT12E. O Transmissor consiste em um pino de dados, uma antena, um terra e energia. É trabalho do codificador HT12E fornecer dados ao transmissor. O codificador consiste em 4 pinos de dados cujos dados podem ser enviados. Usaremos esses 4 pinos de dados para representar os quatro movimentos, um ALTO nesses pinos individualmente representará um dos quatro movimentos e um BAIXO em todos representa ficar parado.
O diagrama do circuito é como mostrado:
Os pinos do lado esquerdo (A0-A7) são os pinos de endereço e definem o par que irá trocar dados (o transmissor e o receptor tendo os mesmos endereços irão apenas compartilhar dados). Definiremos A0-A7 como BAIXO (aterrado).
Os pinos de entrada de dados são conectados aos pinos digitais do Arduino (neste projeto de 6 a 9) e eles produzirão os dados de comando como:
Comando Pino Digital (Quando ALTO)
9 para a frente
10 reverso
11 Esquerda
12 certo
Vamos digitalWrite os pinos digitais como HIGH com base na entrada de ADXL335 para executar o movimento necessário.
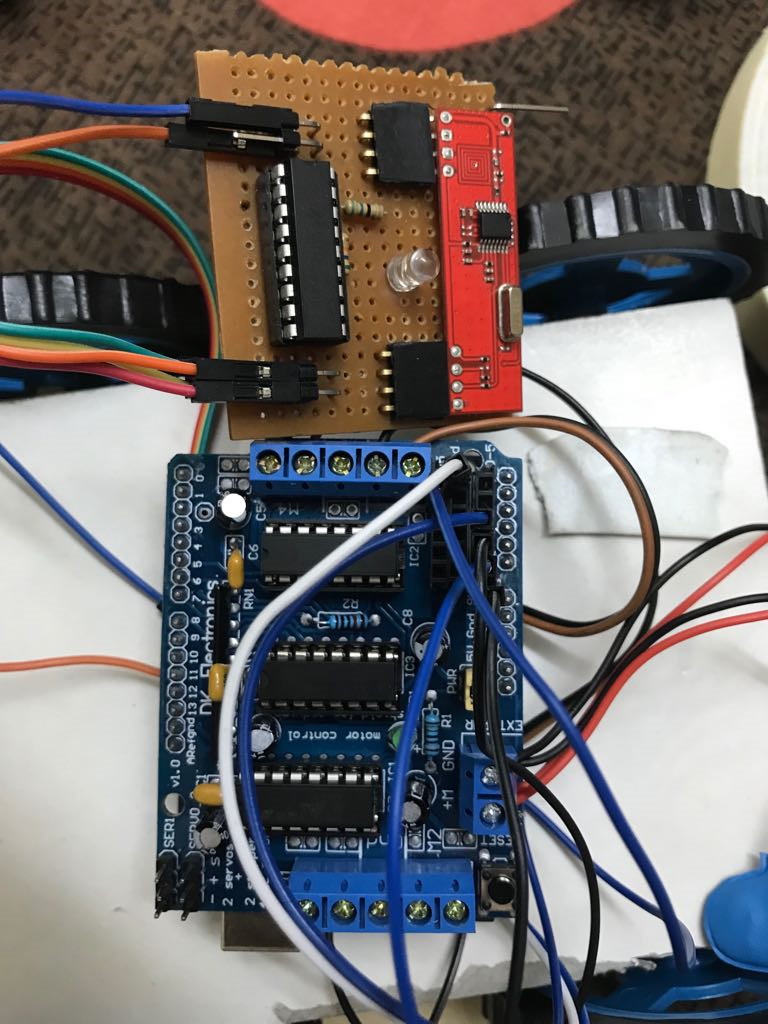
Circuito receptor
O circuito do receptor é completamente semelhante ao circuito do transmissor, conforme mostrado, mas em vez de pinos de dados indo como saída do Arduino, neste caso eles serão lidos como entradas para receber o comando do Arduino Uno e executar os motores conforme necessário:
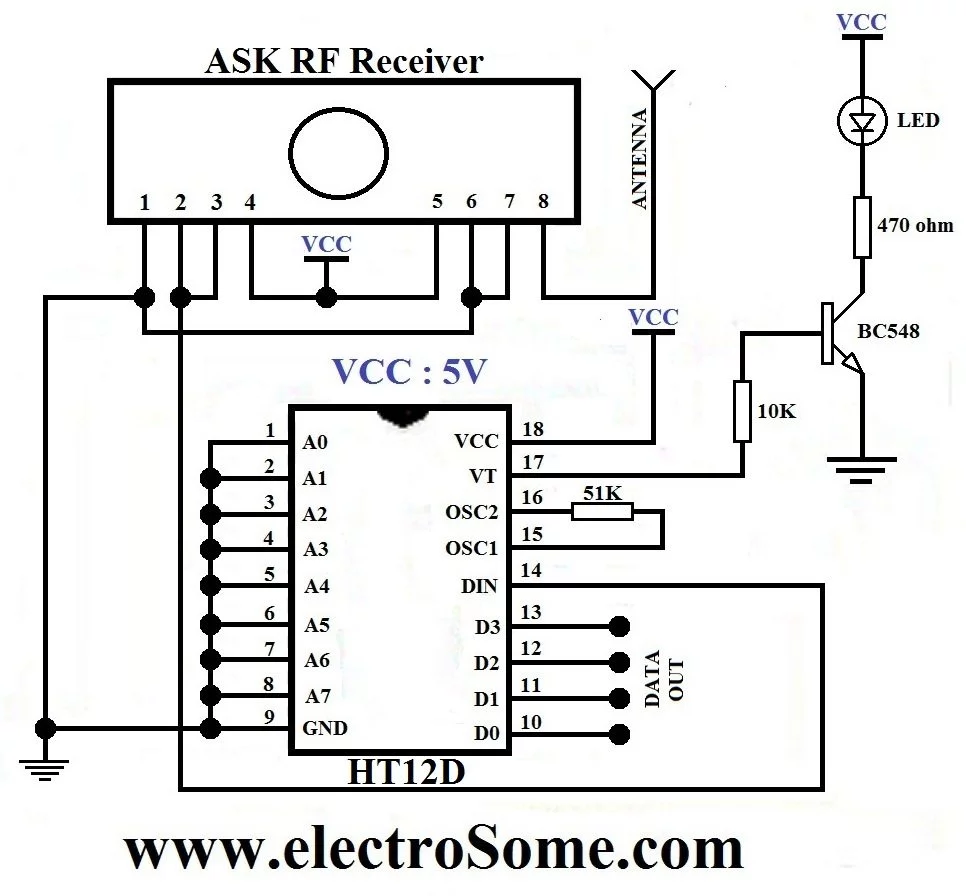
Para simplificar, você pode conectar o LED em série no pino 17 com um resistor de 1K em vez do circuito complexo, como mostrado para indicar a conexão adequada com o transmissor.
3. PROTETOR DO MOTOR
A blindagem do motor é a parte mais fácil de manusear devido à disponibilidade da biblioteca Adafruit AFMotor, link:- https://github.com/adafruit/Adafruit-Motor-Shield-library
Baixe e copie a biblioteca na pasta de bibliotecas do Arduino para poder incluí-la no esboço do programa.
Um exemplo de biblioteca AFMotor é fornecido:
#include AF_DCMotor motor (4); // Conecte os fios do motor ao ponto Motor 4 na configuração do shieldvoid () {Serial.begin (9600); // configura a biblioteca serial em 9600 bps Serial.println ("Teste do motor!"); // liga o motor motor.setSpeed (200); motor.run (RELEASE);} void loop () {uint8_t i; Serial.print ("tick"); motor.run (FORWARD); para (i =0; i <255; i ++) {motor.setSpeed (i); atraso (10);} para (i =255; i! =0; i--) {motor.setSpeed (i); atraso (10);} Serial.print ("tock"); motor.run (PARA TRÁS); para (i =0; i <255; i ++) {motor.setSpeed (i); atraso (10);} para (i =255; i! =0; i--) {motor.setSpeed (i); atraso (10);} Serial.print ("tecnologia"); motor.run (RELEASE); atraso (1000);
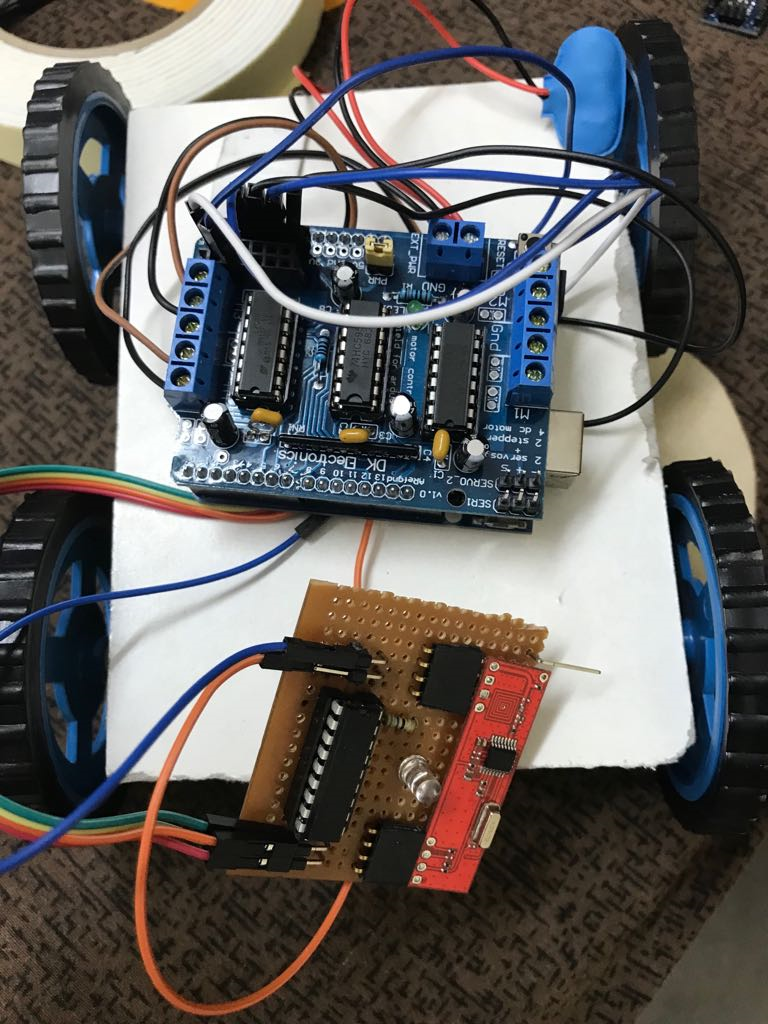
4. Combinando tudo
A última e a parte final incluem combinar todas as partes acima para formar o robô completo que segue os comandos da mão!
Como a blindagem do motor usa quase todos os pinos digitais, usaremos os pinos analógicos do Arduino Uno para ler os dados do receptor. O diagrama de circuito final é o dado:
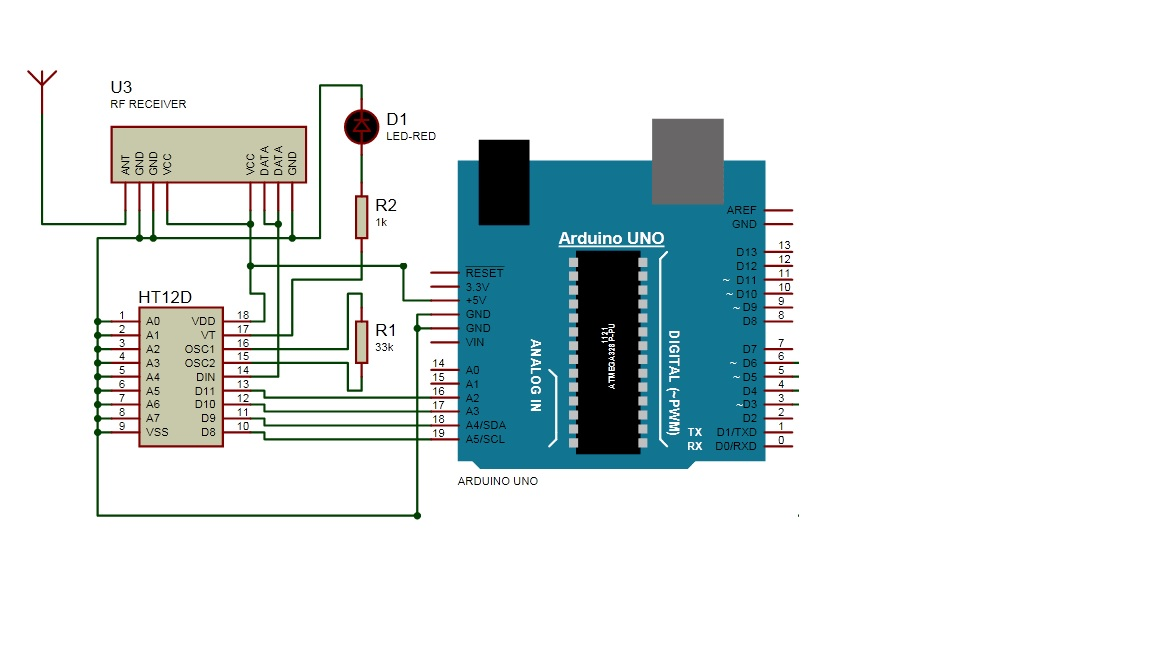
A blindagem do motor lida com as conexões aos motores. Conecte uma bateria de 9 V à entrada de energia da blindagem.
NOTA:Eu pessoalmente prefiro conectar 2 ou até mesmo 3,9 V baterias em paralelo à entrada de energia da blindagem para fornecer energia suficiente para operar todos os quatro motores. Eu conectei os quatro motores em um grupo de 2 (os mesmos motores são conectados em paralelo e, portanto, requerem apenas os pontos 3 e 4 do motor para funcionar).
O código final
Para Arduino Nano:
int x_axis =0; int y_axis =0; int forward =9; int backward =10; int right =11; int left =12; void setup () {pinMode (A0, INPUT); // pinMode do eixo X (A3, OUTPUT); // pinMode do eixo Y (forward, OUTPUT); // HIGH para mover para frente pinMode (backward, OUTPUT); // HIGH para mover para trás pinMode (right, OUTPUT); // HIGH para mover para a direita pinMode (left, OUTPUT); // HIGH para mover para a esquerda Serial.begin (9600);} void loop () {x_axis =analogRead (A0); y_axis =analogRead (A3); Serial.print ("X ="); Serial.println (x_axis); Serial.print ("Y ="); Serial.println (eixo y); if (eixo y> =390) {Serial.println ("Avançar"); digitalWrite (para a frente, HIGH); } else {if (y_axis <=310) {Serial.println ("BACK"); digitalWrite (para trás, ALTO); } else {if (x_axis> =380) {Serial.println ("RIGHT"); digitalWrite (direita, ALTO); } else {if (x_axis <=320) {Serial.println ("LEFT"); digitalWrite (esquerda, ALTO); } Serial.println (""); }}} atraso (200); if (x_axis> 320 &&x_axis <380 &&y_axis> 310 &&y_axis <390) {digitalWrite (forward, LOW); digitalWrite (para trás, BAIXO); digitalWrite (direita, BAIXO); digitalWrite (esquerda, BAIXO); }} Para Arduino Uno:
#include AF_DCMotor motor_right (3); AF_DCMotor motor_left (4); int forward =0; int backward =0; int right =0; int left =0; void setup () { pinMode (A2, INPUT); pinMode (A3, INPUT); pinMode (A4, INPUT); pinMode (A5, INPUT); Serial.begin (9600); motor_right.setSpeed (255); motor_left.setSpeed (255); motor_right.run (RELEASE); motor_left.run (RELEASE);} void loop () {forward =digitalRead (A0); para trás =digitalRead (A1); direita =leitura digital (A2); esquerda =leitura digital (A3); if (forward ==HIGH) {motor_right.run (FORWARD); motor_left.run (FORWARD); Serial.println ("Encaminhar"); } if (backward ==HIGH) {motor_right.run (BACKWARD); motor_left.run (BACKWARD); Serial.println ("Reverso"); } if (right ==HIGH) {motor_right.run (FORWARD); motor_left.run (RELEASE); Serial.println ("DIREITO"); } if (left ==HIGH) {motor_right.run (RELEASE); motor_left.run (FORWARD); Serial.println ("LEFT"); } if (left ==LOW &&right ==LOW &&forward ==LOW &&backward ==LOW) {motor_right.run (RELEASE); motor_left.run (RELEASE); } atraso (100);} As fotos e vídeos estão aqui:
Processo de manufatura
- Aceitar moeda de controle com Arduino
- Arduino Control Center
- Arduino com Bluetooth para controlar um LED!
- Robô seguidor de linha
- Calculadora UNO simples
- Controle do umidificador Arduino
- Robô controlado por fala
- Persistência da visão
- Controle do carro com Arduino Uno e Bluetooth
- Controle de ventilador PWM de 4 pinos de 25 kHz com Arduino Uno