


Otto DIY construa seu próprio robô em uma hora!
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 6 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Ferramentas e máquinas necessárias
 |
| |||
|
Aplicativos e serviços online
 |
| |||
 |
| |||
 |
|
Sobre este projeto
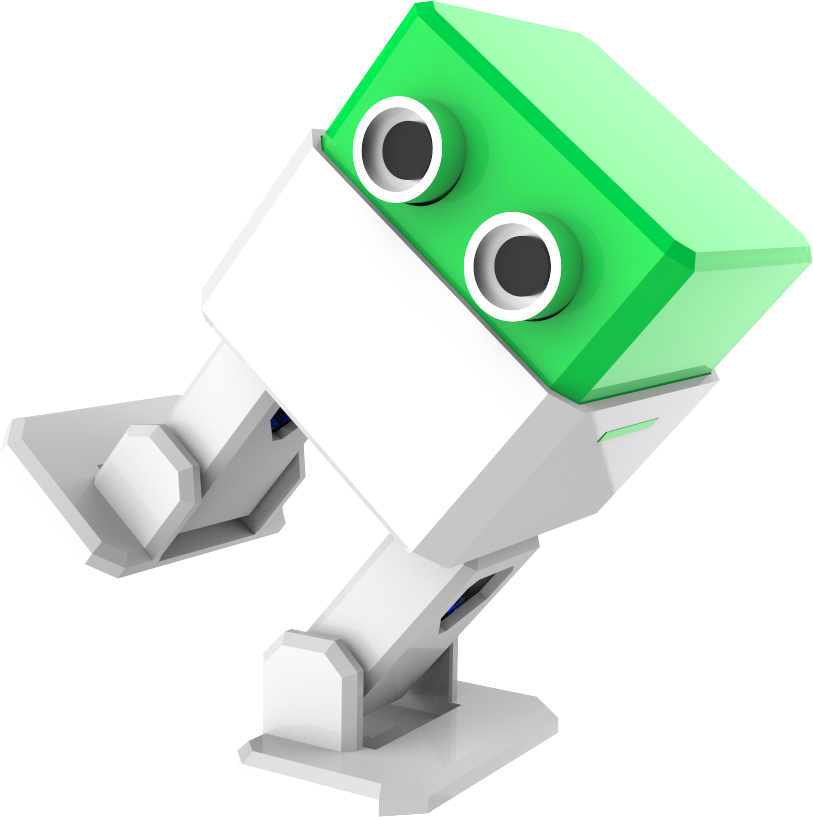
Quem é Otto?
Um robô interativo que qualquer pessoa pode fazer!

O que Otto pode fazer?
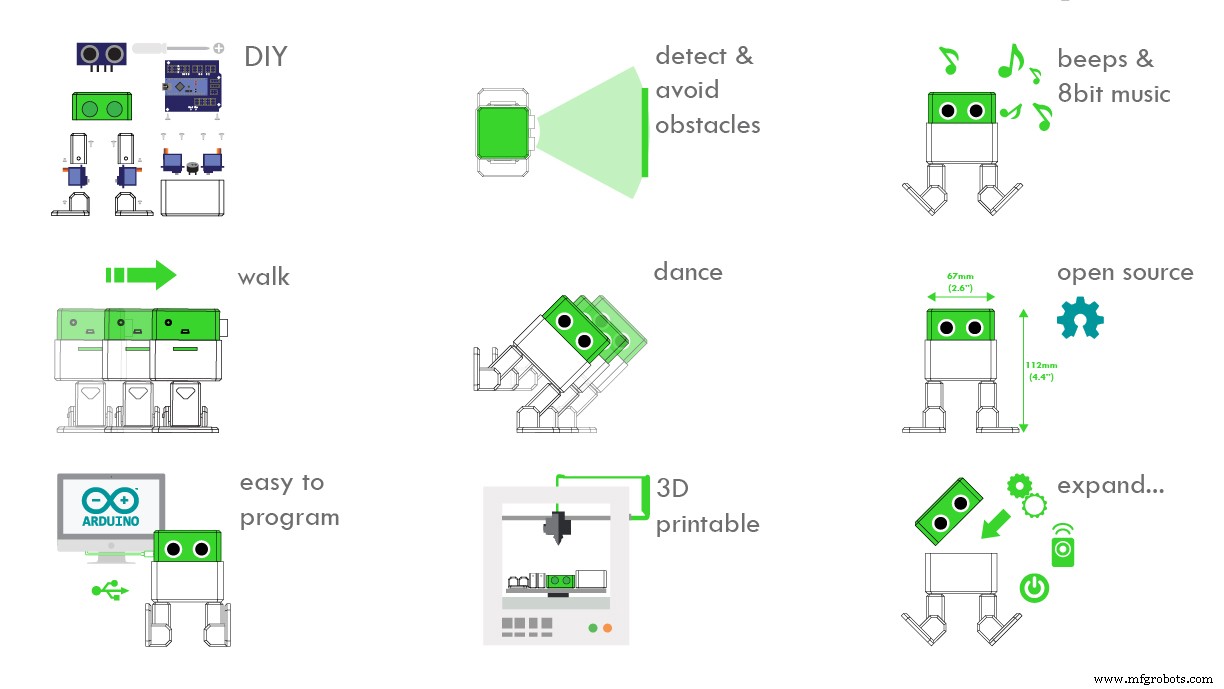
Otto caminha, dança, faz sons e evita obstáculos.
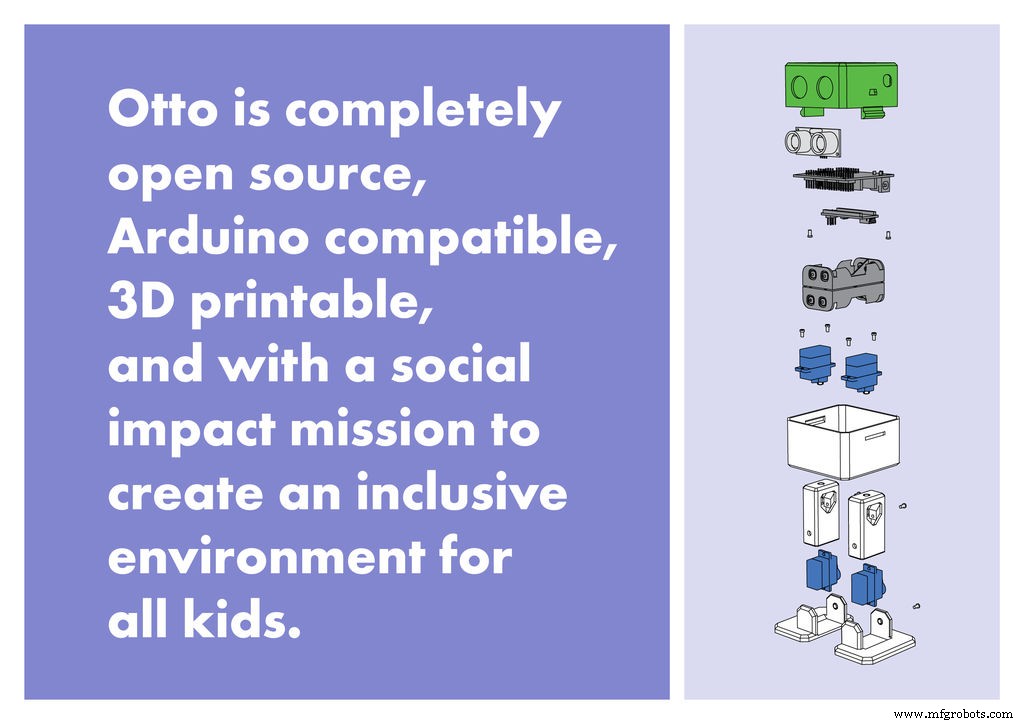
Por que Otto é especial?
Otto é totalmente de código aberto, compatível com Arduino, imprimível em 3D e com uma missão de impacto social de criar um ambiente inclusivo para as crianças.
Otto foi inspirado por outro robô instrutível BoB, o BiPed, e programado usando o código de outro robô bípede de código aberto chamado Zowi.
CC-BY-SA
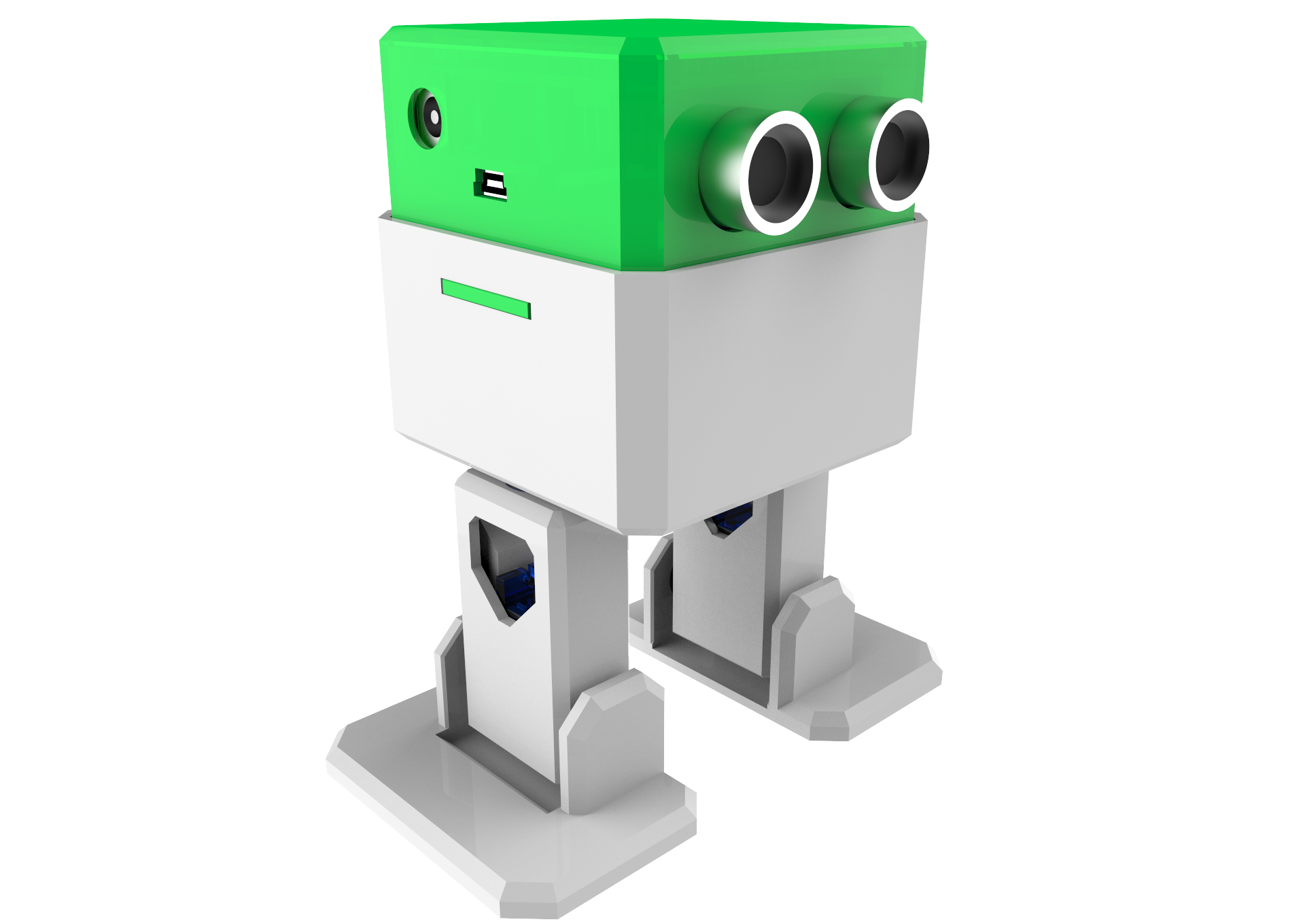
As diferenças de Otto estão no tamanho da montagem (11cm x 7cm x12cm), integração mais limpa de componentes e expressões. Usando peças impressas em 3D e prontas para uso, conexões eletrônicas simples (quase nenhuma soldagem necessária) e habilidades básicas de codificação, você será capaz de construir seu próprio amigo Otto em apenas uma hora! ou ainda menos
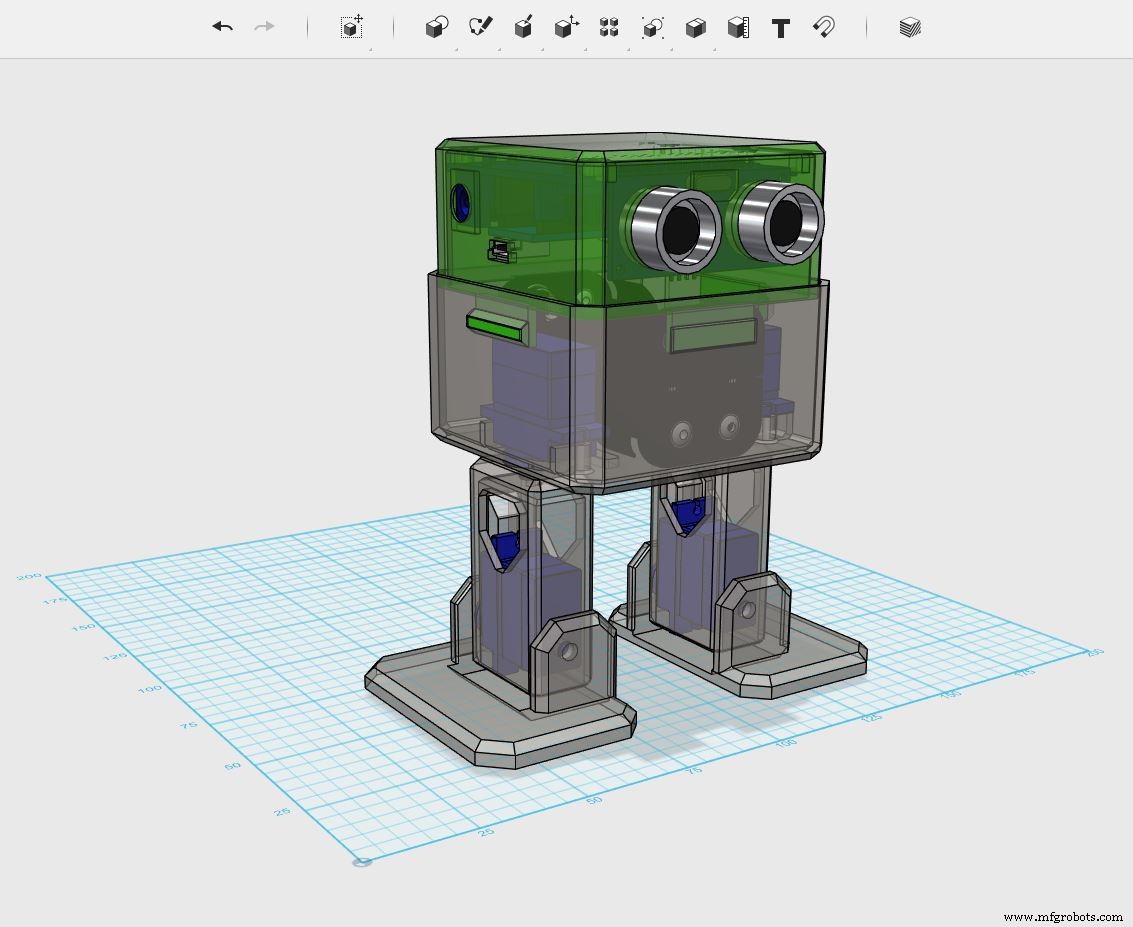
Otto foi projetado usando o Autodesk 123D Design, agora o software ThinkerCAD, você pode modificá-lo para personalização ou melhorias adicionais!
Este passo a passo se concentra em como construir a versão simples Otto DIY; sim, existem robôs bípedes mais avançados como Otto DIY + ou Tito
Etapa 1:primeiro reúna todas as peças e ferramentas
Reúna todas as peças de hardware disponíveis no mercado que você precisa para esta montagem.
mini bread board é uma alternativa para o escudo, mas é necessário mais fiação e tempo
Então você só precisa imprimir em 3D 6 peças no total:
11. Cabeça impressa em 3D.
12. Corpo impresso em 3D.
13. Perna impressa em 3D x2.
14. Pé impresso em 3D x2
Opcional:cortador para pós-limpeza das peças 3D (se a qualidade de impressão 3D for boa o suficiente, não há necessidade) e um ferro de solda (se desejar a energia da bateria, caso contrário ainda pode conectá-lo através de USB para energizar)
É tudo simples !; baixar todos os arquivos .stl , Se você não tiver uma impressora 3D, você sempre poderá acessar o seu maker space local.
Se você não tem ou é difícil conseguir a peça, você pode simplesmente comprar nossos kits completos visita www.ottodiy.com
Configurações de impressão 3D
Otto é muito bem desenhado para impressão 3D, os arquivos que você baixou são orientados para propriedades e centralizados, então não vai lhe dar problemas se você seguir estes parâmetros comuns:
- Recomendado o uso de uma impressora 3D FDM com material PLA.
- Não há necessidade de suportes ou balsas.
- Resolução:0,15 mm
- densidade de preenchimento 20%
Para fatiar e gerar o código g para o software divisor gratuito da máquina como Cura ou em nosso caso FlashPrint que vem com a impressora 3D FlashForge Finder que estamos usando (se você está terceirizando a impressão, não precisa se preocupar com isso)
Após a impressão você precisará limpar um pouco as áreas das pernas e pés que fixam os motores.
Verifique suas peças
Como mencionado na etapa 2, os micro servo motores vêm com 3 parafusos na imagem agora incluídos e reorganizados o número das peças para facilitar a leitura.
Lembre-se de ter magnetizado sua mini chave de fenda.
Baixe ou imprima os manuais de instruções ou apenas siga este vídeo:
Conjunto de servos de pé
Coloque o micro servo dentro dos pés e depois empurre-o para dentro, se estiver muito duro talvez precise limpar mais a área com um cortador.
É muito importante verificar se o servo é capaz de girar pelo menos 90 graus para cada lado.
Após verificar o movimento use apenas o pequeno parafuso para fixá-lo.
O mesmo processo para o outro pé.
Fixar servos no corpo
Pegue os outros 2 micro servos e coloque-os nos locais definidos no corpo impresso em 3D e fixe-os apenas com os parafusos pontiagudos.
Fixar as pernas no corpo
Conecte as pernas ao hub do micro servo, importante como os servos de pé, você deve verificar se as pernas são capazes de girar 90 graus de cada lado em relação ao corpo.
Depois de verificar o alinhamento, fixe-os com os pequenos parafusos no orifício dentro da perna.
Fixe o pé nas pernas
Cuidando dos cabos como mostra a ilustração você deve colocar os cabos dentro das ranhuras do corpo passando pelo furo das pernas.
Assim que estiverem na posição correta, use os parafusos pontiagudos para fixá-los por trás.
Montagem da cabeça
Começar pelo sensor de ultrassom é importante para puxar os olhos até o limite.
Depois de colocar o Arduino nano na blindagem, opcionalmente, você pode soldar o cabo positivo do porta-bateria ao Vin da placa e o negativo a qualquer GND.
Insira diagonalmente as duas placas juntas voltadas para o conector USB no orifício na cabeça impressa 3D e, em seguida, use os últimos 2 parafusos pontiagudos para fixá-la.
Etapa 9:Conexão elétrica
Prepare os cabos DuPont, micro switch e buzzer.
Em seguida, siga os números dos pinos do diagrama e certifique-se de colocá-los na posição correta.
Se você não tem ou não encontra o escudo Arduino Nano, use uma placa de pão e siga este diagrama de circuito TinkerCAD Circuits
Código com blocos
Você sempre pode tentar os códigos fonte do Arduino da Otto Wikifactory.
Aqui você pode encontrar alguns tutoriais complementares para iniciantes para rapidamente começar a usar o Arduino para cada componente:
- Tutorial do servo motor:https://arduinogetstarted.com/tutorials/arduino-servo-motor
- Tutorial do sensor ultrassônico:https://arduinogetstarted.com/tutorials/arduino-ultrasonic-sensor
- Toque Tutorial do sensor:https://arduinogetstarted.com/tutorials/arduino-touch-sensor
- Tutorial da campainha:https://arduinogetstarted.com/tutorials/arduino-piezo-buzzer
Visite www.ottodiy.com
A versão Otto DIY + tem mais possibilidades de uso de Bluetooth, mais sensores e interações.
poste seu remix e modificações no Wikifactory
Código
- Evite obstáculos
Evite obstáculos Arduino
Otto caminhará sem parar até ver um obstáculo na faixa, será surpreendido, voltará e depois continuará caminhando// ---------------------- ------------------------------------------ // - firmware básico do Zowi v2 adaptado para Otto // - (c) BQ. Lançado sob uma licença GPL // - 04 de dezembro de 2015 // - Autores:Anita de Prado:ana.deprado@bq.com//-- Jose Alberca:jose.alberca@bq.com//-- Javier Isabel:javier.isabel@bq.com//-- Juan Gonzalez (obijuan):juan.gonzalez@bq.com//-- Irene Sanz:irene.sanz@bq.com//---------- -------------------------------------------------- ----- // - Experimente todos os recursos que Otto tem graças ao Zowi! // --------------------------- -------------------------------------- # include#include #include #include #include #include #include #include OttoSerialCommand SCmd; // O objeto SerialCommand // - Biblioteca Otto # include Otto Otto; // Aqui é Otto! // ------------------------------------------ --------------- // - Primeiro passo:Configure os pinos onde os servos estão conectados / * --------------- | O O | | --------------- | YR 3 ==> | | <==YL 2 --------------- || || || || RR 5 ==> ----- ------ <==RL 4 | ----- ------ | * / #define PIN_YL 2 // servo [0] #define PIN_YR 3 // servo [1] #define PIN_RL 4 // servo [2] #define PIN_RR 5 // servo [3] // --- Botões Otto # define PIN_SecondButton 6 # define PIN_ThirdButton 7 /////// //////////////////////////////////////////////////////// ////////////-- Variáveis globais ---------------------------------- --------- /////////////////////////////////////////// //////////////////////////////// const char programID [] ="Otto_todo"; // Cada programa terá um IDconst char name_fac ='$'; // Factory nameconst char name_fir ='#'; // Nome // - Parâmetros de movimentoint T =1000; // Duração inicial do movimentoint moveId =0; // Número de movimentoint moveSize =15; // Associado à altura de alguns movimentos // --------------------------------------- ------------------ // - Otto tem 5 modos:// - * MODE =0:Otto está aguardando // - * MODE =1:Modo de dança ! // - * MODE =2:Modo detector de obstáculo // - * MODE =3:Modo detector de ruído // - * MODE =4:OttoPAD ou qualquer modo de teleoperação (escuta SerialPort). // ------------------------------------------------ --------- volátil int MODE =0; // Estado de Otto na máquina principal de estado. botão bool volátilPushed =false; // Variável para lembrar quando um botão for pressionado volátil bool buttonAPushed =false; // Variável a ser lembrada quando um botão for pressionado volátil bool buttonBPushed =false; // Variável a ser lembrada quando o botão B for pressionado com sinalização longa previousMillis =0; int randomDance =0; int randomSteps =0; bool obstacleDetected =false; /////////////////// //////////////////////////////////////////////////////// -- Configurar ----------------------------------------------- ------- /////////////////////////////////////////////// ////////////////////////////// void setup () {// Inicialização da comunicação serial Serial.begin (115200); pinMode (PIN_SecondButton, INPUT); pinMode (PIN_ThirdButton, INPUT); // Definir os pinos do servo Otto.init (PIN_YL, PIN_YR, PIN_RL, PIN_RR, true); // Remova o comentário para definir os trims do servo manualmente e salve no EEPROM //Otto.setTrims(TRIM_YL, TRIM_YR, TRIM_RL, TRIM_RR); //Otto.saveTrimsOnEEPROM (); // Remova o comentário apenas para um upload quando você finalmente definir os cortes. // Define uma semente aleatória randomSeed (analogRead (A6)); // Interrumptions enableInterrupt (PIN_SecondButton, secondButtonPushed, RISING); enableInterrupt (PIN_ThirdButton, thirdButtonPushed, RISING); // Configurar callbacks para comandos SerialCommand SCmd.addCommand ("S", receiveStop); // sendAck &sendFinalAck SCmd.addCommand ("L", receiveLED); // sendAck &sendFinalAck SCmd.addCommand ("T", recieveBuzzer); // sendAck &sendFinalAck SCmd.addCommand ("M", receiveMovement); // sendAck &sendFinalAck SCmd.addCommand ("H", receiveGesture); // sendAck &sendFinalAck SCmd.addCommand ("K", receiveSing); // sendAck &sendFinalAck SCmd.addCommand ("C", receiveTrims); // sendAck &sendFinalAck SCmd.addCommand ("G", receiveServo); // sendAck &sendFinalAck SCmd.addCommand ("D", requestDistance); SCmd.addCommand ("N", requestNoise); SCmd.addCommand ("B", requestBattery); SCmd.addCommand ("I", requestProgramId); SCmd.addDefaultHandler (receiveStop); // Otto acorde! Otto.sing (S_connection); Otto.home (); atraso (50); // Animação Uuuuuh - Um pequeno momento de surpresa inicial // ----- for (int i =0; i <2; i ++) {for (int i =0; i <8; i ++) {if (buttonPushed) {pausa;} Otto.putAnimationMouth (littleUuh, i); atraso (150); }} // ----- // Sorria para um Otto feliz :) if (! ButtonPushed) {Otto.putMouth (smile); Otto.sing (S_happy); atraso (200); } // Se o nome de Otto for '#' significa que Otto não foi batizado // Neste caso, Otto faz uma saudação mais longa // 5 =endereço EEPROM que contém o caractere do primeiro nome if (EEPROM.read (5) ==name_fir) {if (! buttonPushed) {Otto.jump (1.700); atraso (200); } if (! buttonPushed) {Otto.shakeLeg (1, T, 1); } if (! buttonPushed) {Otto.putMouth (smallSurprise); Otto.swing (2.800,20); Otto.home (); }} if (! buttonPushed) {Otto.putMouth (happyOpen); } previousMillis =millis ();} ////////////////////////////////////////////// /////////////////////////////// - Principal Loop ------------------- -------------------------- ////////////////////////// //////////////////////////////////////////////////// void loop () { // - MODO 2 - Modo detector de obstáculo if (obstacleDetected) {Otto.sing (S_surprise); Otto.playGesture (OttoFretful); Otto.sing (S_fart3); Otto.walk (2,1300, -1); Otto.turn (2,1000, -1); atraso (50); obstacleDetector (); } else {Otto.walk (1,1000,1); obstacleDetector (); }} //////////////////////////////////////////////////// /////////////////////-- Funções -------------------------- ------------------------ ////////////////////////// /////////////////////////////////////////////////// - Função executada quando o segundo botão é pushvoid secondButtonPushed () {buttonAPushed =true; if (! buttonPushed) {buttonPushed =true; Otto.putMouth (smallSurprise); }} // - Função executada quando o terceiro botão é pressionado para evitar o thirdButtonPushed () {buttonBPushed =true; if (! buttonPushed) {buttonPushed =true; Otto.putMouth (smallSurprise); }} // - Função para ler o sensor de distância e atualizar obstacleDetected variablevoid obstacleDetector () {int distance =Otto.getDistance (); if (distância <15) {obstacleDetected =true; } else {obstacleDetected =false; }} // - Função para receber o comando Stop.void receiveStop () {sendAck (); Otto.home (); sendFinalAck ();} // - Função para receber comandos LEDvoid receiveLED () {// sendAck ¶r se necessário sendAck (); Otto.home (); // Exemplos de comandos Bluetooth recebidosLED // L 000000001000010100100011000000000 // L 0011111111111111111111111111111111111 (todos los LED encendidos) unsigned long int matrix; char * arg; char * endstr; arg =SCmd.next (); //Serial.println (arg); if (arg! =NULL) {matriz =strtoul (arg, &endstr, 2); // Converte uma string de caracteres em um inteiro longo sem sinal Otto.putMouth (matrix, false); } else {Otto.putMouth (xMouth); atraso (2000); Otto.clearMouth (); } sendFinalAck ();} // - Função para receber comandos da campainha evite recieveBuzzer () {// sendAck ¶r se necessário sendAck (); Otto.home (); erro bool =falso; int frec; duração interna; char * arg; arg =SCmd.next (); if (arg! =NULL) {frec =atoi (arg); } // Converte uma string de caracteres em um inteiro else {error =true;} arg =SCmd.next (); if (arg! =NULL) {duração =atoi (arg); } // Converte uma string char em um inteiro else {error =true;} if (error ==true) {Otto.putMouth (xMouth); atraso (2000); Otto.clearMouth (); } else {Otto._tone (frec, duração, 1); } sendFinalAck ();} // - Função para receber comandos TRimsvoid receiveTrims () {// sendAck ¶r se necessário sendAck (); Otto.home (); int trim_YL, trim_YR, trim_RL, trim_RR; // Definição do comando Servo Bluetooth // C trim_YL trim_YR trim_RL trim_RR // Exemplos de comandos receiveTrims Bluetooth // C 20 0 -8 3 bool error =false; char * arg; arg =SCmd.next (); if (arg! =NULL) {trim_YL =atoi (arg); } // Converte uma string de caracteres em um inteiro else {error =true;} arg =SCmd.next (); if (arg! =NULL) {trim_YR =atoi (arg); } // Converte uma string de caracteres em um inteiro else {error =true;} arg =SCmd.next (); if (arg! =NULL) {trim_RL =atoi (arg); } // Converte uma string de caracteres em um inteiro else {error =true;} arg =SCmd.next (); if (arg! =NULL) {trim_RR =atoi (arg); } // Converte uma string char em um inteiro else {error =true;} if (error ==true) {Otto.putMouth (xMouth); atraso (2000); Otto.clearMouth (); } else {// Salvar no EEPROM Otto.setTrims (trim_YL, trim_YR, trim_RL, trim_RR); Otto.saveTrimsOnEEPROM (); // Remova o comentário apenas para um upload quando você finalmente definir os cortes. } sendFinalAck ();} // - Função para receber comandos Servo evitar receiveServo () {sendAck (); moveId =30; // Definição do comando Servo Bluetooth // G servo_YL servo_YR servo_RL servo_RR // Exemplo de comandos receiveServo Bluetooth // G 90 85 96 78 bool error =false; char * arg; int servo_YL, servo_YR, servo_RL, servo_RR; arg =SCmd.next (); if (arg! =NULL) {servo_YL =atoi (arg); } // Converte uma string de caracteres em um inteiro else {error =true;} arg =SCmd.next (); if (arg! =NULL) {servo_YR =atoi (arg); } // Converte uma string de caracteres em um inteiro else {error =true;} arg =SCmd.next (); if (arg! =NULL) {servo_RL =atoi (arg); } // Converte uma string de caracteres em um inteiro else {error =true;} arg =SCmd.next (); if (arg! =NULL) {servo_RR =atoi (arg); } // Converte uma string char em um inteiro else {error =true;} if (error ==true) {Otto.putMouth (xMouth); atraso (2000); Otto.clearMouth (); } else {// Atualizar Servo:int servoPos [4] ={servo_YL, servo_YR, servo_RL, servo_RR}; Otto._moveServos (200, servoPos); // Mover 200ms} sendFinalAck ();} // - Função para receber comandos de movimentovoid receiveMovement () {sendAck (); if (Otto.getRestState () ==true) {Otto.setRestState (false); } // Definição dos comandos Bluetooth de movimento // M MoveID T MoveSize char * arg; arg =SCmd.next (); if (arg! =NULL) {moveId =atoi (arg);} else {Otto.putMouth (xMouth); atraso (2000); Otto.clearMouth (); moveId =0; // parar} arg =SCmd.next (); if (arg! =NULL) {T =atoi (arg);} else {T =1000; } arg =SCmd.next (); if (arg! =NULL) {moveSize =atoi (arg);} else {moveSize =15; }} // - Função para executar o movimento correto de acordo com o comando de movimento recebido.void move (int moveId) {bool manualMode =false; switch (moveId) {case 0:Otto.home (); pausa; caso 1:// M 1 1000 Otto.walk (1, T, 1); pausa; caso 2:// M2 1000 Otto.walk (1, T, -1); pausa; caso 3:// M 3 1000 Otto.turn (1, T, 1); pausa; caso 4:// M 4 1000 Otto.turn (1, T, -1); pausa; caso 5:// M 5 1000 30 Otto.updown (1, T, moveSize); pausa; caso 6:// M 6 1000 30 Otto.moonwalker (1, T, moveSize, 1); pausa; caso 7:// M 7 1000 30 Otto.moonwalker (1, T, moveSize, -1); pausa; caso 8:// M 8 1000 30 Otto.swing (1, T, moveSize); pausa; caso 9:// M 9 1000 30 Otto.crusaito (1, T, moveSize, 1); pausa; caso 10:// M 10 1000 30 Otto.crusaito (1, T, moveSize, -1); pausa; caso 11:// M 11 1000 Otto.jump (1, T); pausa; case 12:// M 12 1000 30 Otto.flapping (1, T, moveSize, 1); pausa; case 13:// M 13 1000 30 Otto.flapping (1, T, moveSize, -1); pausa; caso 14:// M 14 1000 20 Otto.tiptoeSwing (1, T, moveSize); pausa; caso 15:// M 15 500 Otto.bend (1, T, 1); pausa; caso 16:// M 16 500 Otto.bend (1, T, -1); pausa; caso 17:// M 17 500 Otto.shakeLeg (1, T, 1); pausa; caso 18:// M 18 500 Otto.shakeLeg (1, T, -1); pausa; caso 19:// M 19 500 20 Otto.jitter (1, T, moveSize); pausa; caso 20:// M 20 500 15 Otto.ascendingTurn (1, T, moveSize); pausa; padrão:manualMode =true; pausa; } if (! manualMode) {sendFinalAck (); }} // - Função para receber comandos de gestosvoid receiveGesture () {// sendAck ¶r se necessário sendAck (); Otto.home (); // Definição de comandos Bluetooth Gesture // H GestureID int Gesture =0; char * arg; arg =SCmd.next (); if (arg! =NULL) {gesto =atoi (arg);} else {Otto.putMouth (xMouth); atraso (2000); Otto.clearMouth (); } switch (gesto) {case 1:// H 1 Otto.playGesture (OttoHappy); pausa; caso 2:// H 2 Otto.playGesture (OttoSuperHappy); pausa; caso 3:// H 3 Otto.playGesture (OttoSad); pausa; caso 4:// H 4 Otto.playGesture (OttoSleeping); pausa; caso 5:// H 5 Otto.playGesture (OttoFart); pausa; case 6:// H 6 Otto.playGesture (OttoConfused); pausa; caso 7:// H 7 Otto.playGesture (OttoLove); pausa; caso 8:// H 8 Otto.playGesture (OttoAngry); pausa; case 9:// H 9 Otto.playGesture (OttoFretful); pausa; case 10:// H 10 Otto.playGesture (OttoMagic); pausa; case 11:// H 11 Otto.playGesture (OttoWave); pausa; case 12:// H 12 Otto.playGesture (OttoVictory); pausa; caso 13:// H 13 Otto.playGesture (OttoFail); pausa; padrão:break; } sendFinalAck ();} // - Função para receber comandos singvoid receiveSing () {// sendAck &stop se necessário sendAck (); Otto.home (); // Definição dos comandos Sing Bluetooth // K SingID int sing =0; char * arg; arg =SCmd.next (); if (arg! =NULL) {sing =atoi (arg);} else {Otto.putMouth (xMouth); atraso (2000); Otto.clearMouth (); } switch (sing) {case 1:// K 1 Otto.sing (S_connection); pausa; caso 2:// K 2 Otto.sing (S_disconnection); pausa; caso 3:// K 3 Otto.sing (S_surprise); pausa; case 4:// K 4 Otto.sing (S_OhOoh); pausa; caso 5:// K 5 Otto.sing (S_OhOoh2); pausa; caso 6:// K 6 Otto.sing (S_cuddly); pausa; caso 7:// K 7 Otto.sing (S_sleeping); pausa; caso 8:// K 8 Otto.sing (S_happy); pausa; case 9:// K 9 Otto.sing (S_superHappy); pausa; case 10:// K 10 Otto.sing (S_happy_short); pausa; caso 11:// K 11 Otto.sing (S_sad); pausa; case 12:// K 12 Otto.sing (S_confused); pausa; caso 13:// K 13 Otto.sing (S_fart1); pausa; caso 14:// K 14 Otto.sing (S_fart2); pausa; caso 15:// K 15 Otto.sing (S_fart3); pausa; case 16:// K 16 Otto.sing (S_mode1); pausa; case 17:// K 17 Otto.sing (S_mode2); pausa; case 18:// K 18 Otto.sing (S_mode3); pausa; caso 19:// K 19 Otto.sing (S_buttonPushed); pausa; padrão:break; } sendFinalAck ();} // - Função para enviar medida do sensor ultrassônico (distância em "cm") void requestDistance () {Otto.home (); // pare se necessário int distance =Otto.getDistance (); Serial.print (F ("&&")); Serial.print (F ("D")); Serial.print (distância); Serial.println (F ("%%")); Serial.flush ();} // - Função para enviar sensor de ruído mensevóide requestNoise () {Otto.home (); // pare se necessário int microfone =Otto.getNoise (); // analogRead (PIN_NoiseSensor); Serial.print (F ("&&")); Serial.print (F ("N")); Serial.print (microfone); Serial.println (F ("%%")); Serial.flush ();} // - Função para enviar percentvoid da tensão da bateria requestBattery () {Otto.home (); // pare se necessário // A primeira leitura da bateria costuma ser uma leitura errada, portanto, iremos descartar este valor. double batteryLevel =Otto.getBatteryLevel (); Serial.print (F ("&&")); Serial.print (F ("B")); Serial.print (batteryLevel); Serial.println (F ("%%")); Serial.flush ();} // - Função para enviar programa IDvoid requestProgramId () {Otto.home (); // pare se necessário Serial.print (F ("&&")); Serial.print (F ("I")); Serial.print (ID do programa); Serial.println (F ("%%")); Serial.flush ();} // - Função para enviar Comando Ack (A) void sendAck () {delay (30); Serial.print (F ("&&")); Serial.print (F ("A")); Serial.println (F ("%%")); Serial.flush ();} // - Função para enviar o comando Ack final (F) void sendFinalAck () {delay (30); Serial.print (F ("&&")); Serial.print (F ("F")); Serial.println (F ("%%")); Serial.flush ();} // - Funções com animatics // ---------------------------------- ---------------------- void OttoLowBatteryAlarm () {double batteryLevel =Otto.getBatteryLevel (); if (batteryLevel <45) {while (! buttonPushed) {Otto.putMouth (thunder); Otto.bendTones (880, 2000, 1.04, 8, 3); // A5 =880 atraso (30); Otto.bendTones (2000, 880, 1.02, 8, 3); // A5 =880 Otto.clearMouth (); atraso (500); }}} void OttoSleeping_withInterrupts () {int bedPos_0 [4] ={100, 80, 60, 120}; if (! buttonPushed) {Otto._moveServos (700, bedPos_0); } para (int i =0; i <4; i ++) {if (buttonPushed) {break;} Otto.putAnimationMouth (dreamMouth, 0); Otto.bendTones (100, 200, 1,04, 10, 10); if (buttonPushed) {break;} Otto.putAnimationMouth (dreamMouth, 1); Otto.bendTones (200, 300, 1,04, 10, 10); if (buttonPushed) {break;} Otto.putAnimationMouth (dreamMouth, 2); Otto.bendTones (300, 500, 1,04, 10, 10); atraso (500); if (buttonPushed) {break;} Otto.putAnimationMouth (dreamMouth, 1); Otto.bendTones (400, 250, 1,04, 10, 1); if (buttonPushed) {break;} Otto.putAnimationMouth (dreamMouth, 0); Otto.bendTones (250, 100, 1,04, 10, 1); atraso (500); } if (! buttonPushed) {Otto.putMouth (lineMouth); Otto.sing (S_cuddly); } Otto.home (); if (! buttonPushed) {Otto.putMouth (happyOpen);}}
Fonte do Arduino
Instale primeiro estas Bibliotecashttps://github.com/OttoDIY/DIYPeças personalizadas e gabinetes
Arquivos para impressão 3D Thingiverse .STL
Peças de impressão 3D para usar no processo de construção do arquivo Otto.CAD em thingiverse.comEsquemas
Servos, sensor de ultrassom, buzzer e conexões de bateria, seguem os cabos. use os cabos DuPont.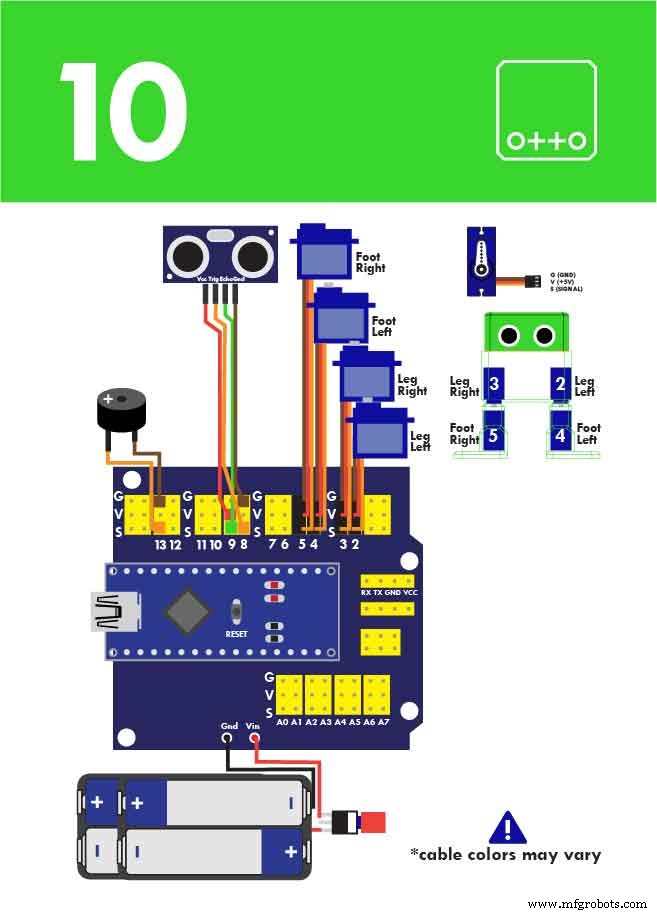
Processo de manufatura
- Construa uma Thermocam DIY
- Hackeando o Lego EV3:Construa seus próprios “olhos” de sensor de objeto
- Faça seu próprio Google Voice HAT
- Construa seu robô de streaming de vídeo controlado pela Internet com Arduino e Raspberry Pi
- Construa um sistema de recuperação de pára-quedas balístico para seu drone
- Como a aprendizagem por reforço pode um dia transformar a operação do seu robô industrial
- Como Construir Sauron, o Senhor dos Robôs
- Construindo seu próprio braço robótico:você deve assumir o risco?
- A melhor maneira de construir seu protótipo de IoT
- Principais compressores de ar:razões para possuir um