


5 maneiras especializadas de programar um robô FANUC
Você decidiu que um robô FANUC é a melhor escolha para o aplicativo escolhido.
Mas qual é a melhor maneira de programar um FANUC?
Você tem alguma escolha real ou precisa usar a opção padrão fornecida pelo fabricante?
Com seus distintos robôs amarelos brilhantes, o fabricante japonês de robôs FANUC é uma escolha popular para pessoas que desejam adicionar automação robótica aos seus negócios.
Você quer garantir que você obtenha o máximo do seu robô escolhido... e isso significa escolher o melhor método de programação.
Por que a maneira padrão de programar um FANUC é restritiva
Você pode presumir que é necessário usar o método de programação padrão fornecido pela FANUC. Esta é uma suposição comum; é certamente verdade que muitas pessoas usam o método padrão para programar seus robôs FANUC.
Existem 2 métodos predefinidos de programação com um robô FANUC.
Estes são:
- TP — Este é o idioma usado pelos pingentes de ensino da FANUC. Eles são editáveis pelo pingente de ensino e armazenados como um arquivo binário.
- Karel — Esta é uma linguagem de programação derivada de Pascal (como muitas linguagens de robôs industriais). Isso pode ser usado para programar o robô usando um editor de texto.
Se você ou alguém da sua equipe tiver experiência em programação Karel, ou se tiver experiência com o uso de pingentes de ensino da FANUC, esses métodos de programação podem ser uma opção viável para você.

No entanto, os métodos padrão de programação de robôs geralmente são muito mais difíceis de usar do que deveriam. Eles também perdem a funcionalidade poderosa que vem com outros métodos de programação.
Você pode estar perdendo uma programação mais intuitiva e poderosa se optar apenas pela opção padrão.
5 maneiras especializadas de programar um robô FANUC
A melhor maneira de programar um robô é aquela que usa suas habilidades existentes em toda a sua extensão. Um que também permite acessar todos os recursos que você precisa do robô.
Aqui estão 5 ótimas maneiras de programar seu robô FANUC; maneiras que fazem o melhor uso de suas habilidades e as habilidades do robô:
1. Com o pingente de ensino
Obviamente, a forma padrão de programar um robô é amplamente utilizada por especialistas em programação FANUC. O pingente de instrução que acompanha o robô permitirá que você acesse muitos aspectos de sua funcionalidade principal.
Ensinar programação pendente envolve muito trabalho; pressionando o botão, navegando nos menus e empurrando o robô para a posição desejada a olho nu (uma técnica conhecida como “jogging”). Criar um programa de qualquer tamanho e complexidade razoável é um processo longo. É um processo igualmente meticuloso para fazer alterações no programa mais tarde.
Ensinar a programação pendente pode ser poderoso nas mãos certas. No entanto, o grande problema é que é um método de programação online que leva muito tempo. Isso significa que o robô precisa ser retirado de ação para reprogramá-lo, o que degrada sua produtividade.
2. Com programação offline baseada em texto
Pode reduzir os efeitos negativos da programação online utilizando a programação offline com o seu robô FANUC. Isso significa que você cria o programa em um computador. Você pode baixá-lo para o controlador do robô quando terminar.
A forma mais rudimentar de programação offline é codificar o programa em um editor de texto; usando a linguagem de programação Karel da FANUC. No entanto, isso requer que você tenha muita experiência em programação de robôs FANUC. Falta qualquer maneira de você depurar o programa à medida que avança. Como resultado, a fase de depuração no robô físico será mais longa e causará atrasos semelhantes à programação online.
3. Com programação gráfica offline
A melhor forma de programar offline o seu robô FANUC é utilizar um software de programação offline dedicado. Isso permite que você crie e depure o programa do robô. Você pode fazer isso usando um simulador gráfico antes de precisar tirar o robô da produção.
Claro, algumas ferramentas de programação offline são mais fáceis de usar do que outras. Por exemplo, RoboDK é um software de programação e simulação offline que qualquer pessoa pode usar, mesmo sem experiência em robótica.
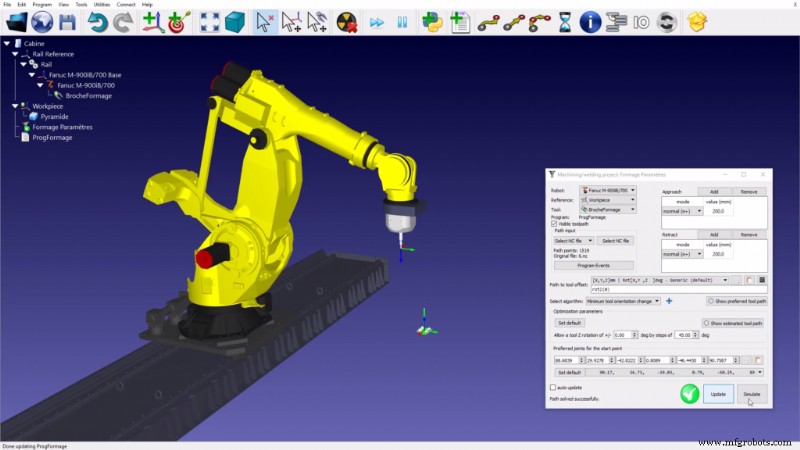
O RoboDK fornece uma interface gráfica intuitiva e traz recursos extras para a programação do seu robô. Estes não estão disponíveis com métodos convencionais como; assistente de usinagem dedicado, capacidade de impressão 3D e muito mais.
4. Com sua linguagem de programação favorita
Se você é um programador experiente, mas não tem muita experiência específica com FANUCs ou robótica, pode se perguntar se pode programar seu robô usando sua linguagem favorita.
No passado, isso teria sido difícil, pois envolveria a criação de bibliotecas de wrapper e possivelmente bibliotecas de comunicação de rede para fazer interface com o controlador do robô. Mas, agora é possível e fácil.
Com o RoboDK, você pode usar qualquer uma das várias linguagens de programação de alto nível para programar seu FANUC. Você pode testar o programa offline no simulador antes de baixá-lo para o robô.
5. Com uma sonda portátil
Todos os quatro métodos anteriores envolvem pelo menos algum entendimento de geometria e programação de robôs. Mesmo com software gráfico offline, onde você pode arrastar o robô na simulação gráfica. Você ainda precisa pensar em como o ambiente simulado se relaciona com o ambiente do mundo real.
Com tudo isso dito, há mais uma maneira especializada de programar um robô FANUC que é ainda mais fácil de usar do que todo o resto.
Com o RoboDK TwinTrack, você pode criar o programa simplesmente traçando o movimento desejado do robô usando uma sonda portátil. O robô então repete esse movimento exato. O TwinTrack também é compatível com programação offline, portanto, não precisa afetar a produção do robô.
Qual é a melhor maneira de programar seu robô FANUC?
Então, qual desses métodos de programação será melhor para você?
Como mencionado, o melhor método de programação é aquele que faz o melhor uso de suas habilidades existentes como programador e permite que você acesse o máximo de recursos do robô.
Claro, o método padrão que vem com os robôs FANUC pode atender a esses critérios.
Com as outras opções listadas neste artigo, você pode acessar funcionalidades mais poderosas com mais facilidade. Você não precisa pressionar sem parar os botões no pingente de ensino do robô ou se amarrar com a linguagem de programação Karel.
Se você quiser tentar programar seu FANUC com o RoboDK, você pode obter uma versão de teste gratuitamente na página de download do RoboDK.
Para obter mais instruções sobre como programar um robô FANUC com o RoboDK, consulte a nossa página de documentação dedicada.
Que dificuldades você tem para programar robôs FANUC? Conte-nos nos comentários abaixo ou participe da discussão no LinkedIn, Twitter, Facebook, Instagram ou no RoboDK Forum.
Como alcançar o corte ágil de tubos com a Sunrob Robotics
Os 11 conceitos básicos de programação de robôs mais úteis
Robô industrial
- Programação do microprocessador
- 5 passos para usar a programação offline com um robô FANUC
- Programação de robôs CNC em 7 etapas fáceis
- Os 11 conceitos básicos de programação de robôs mais úteis
- Programação de robôs industriais para iniciantes
- Novas formas de automação com robótica em 2022
- O mercado de robôs:Fanuc Robotics
- Robô de revestimento Fanuc:o P-250iA
- Robô coletor de alta velocidade
- O robô de pintura Fanuc P-50iB