


DDTv3:O robô de combate impresso em 3D de nylon-Kevlar
DDTv3:O robô de combate impresso em 3D de Nylon-Kevlar
Não tive a chance de escrever o relatório do evento Bot Blast 2015 no início deste ano, em julho, mas se o fizesse não teria muito a dizer. Nem o DDT nem a Silent Spring se saíram muito bem e totalizaram um W-L total de 2-4. Além disso, a estrutura do DDT estava pronta e eu vi esta oportunidade de revisitar alguns dos credos do design que venho defendendo no ano passado, como o "entretenimento com grandes armas" e "direção indireta". Esses conceitos são bons para o valor do entretenimento e confiabilidade de longo prazo, mas não são necessariamente a chave para vencer lutas. Com um pouco de aparição na TV, eu tinha um alvo nas minhas costas e muitos construtores adorariam uma chance de provar seu valor contra um dos construtores de robôs da “nata da cultura”, conforme descrito pelos fundadores do Battlebots. Eu não me importo com isso, mas se for esse o caso, é melhor eu viver de acordo com o exagero. E assim, começando com o DDT, vou evoluir cada robô da minha frota.
Um novo design
Recentemente, Charles comprou uma impressora Mark One 3D da empresa Mark Forged. Esta impressora é única porque tem a capacidade de incorporar fios CONTÍNUOS de fibra (fibra de vidro, kevlar, fibra de carbono) em cada camada de sua impressão. Embora não possa colocar a fibra no eixo vertical de construção, esta é uma melhoria monumental na resistência à tração.
Além disso, imprime náilon como seu material de base, que é mecanicamente superior ao ABS em nossa aplicação. Para demonstrar ainda mais as capacidades e aplicações de sua tecnologia, optei por imprimir DDT como um monobloco de náilon-kevlar.
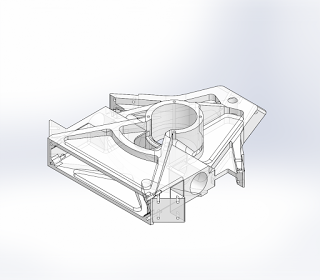
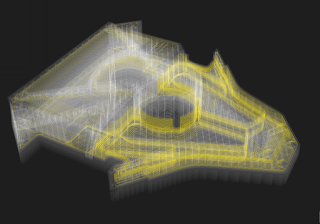
Projetar para uma estrutura unibody é um pouco desafiador porque muitos detalhes sobre as peças, suas conexões e sua ordem de montagem devem ser conhecidos com antecedência. CAD tornou-se uma ferramenta inestimável neste processo; cada peça foi modelada com detalhes excruciantes e uma ordem de montagem detalhada foi desenvolvida para o compartimento de componentes traseiro.
Tenho plena consciência de que este design não é ideal para impressão 3D e talvez possa explicar em outro post se as pessoas estiverem interessadas. O raciocínio para o projeto das treliças eram complementos para enrijecer recursos longos ou finos. Um projeto melhor teria deixado o robô mais compacto, mas teria sido esteticamente chato na minha opinião.
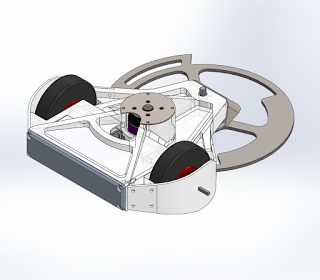
O DDT manteve sua forma única e sua marca registrada “lâmina de bunda enorme”, mas com algumas modificações. Primeiro, o tamanho da lâmina foi reduzido para 6 ″ (em vez de 6,5 ″). Essa decisão foi tomada para liberar algum peso a ser alocado em outro lugar, especificamente nas nervuras das lâminas. Eu mandei fazer duas lâminas para DDT v2 e ambas estavam horrivelmente dobradas depois de mais ou menos um ano em serviço. O design da lâmina mais recente reforçou as seções em cerca de 1,5x e ainda era mais leve do que as lâminas antigas.

Em segundo lugar, mais armadura foi adicionada ao corpo. Essa decisão foi tomada após o número de batidas nas polias e rodas. As partes do quadro seriam engrossadas em geral e a blindagem lateral seria incluída.
Terceiro, o acionamento indireto foi abandonado em favor do acionamento direto para faíscas de prata 22:1 com rodas de espuma macias. Os pequenos motoredutores de latão provaram não ser confiáveis e as relações que eu estava usando eram de longe a moderadas para serem manobráveis. O DDT original usava aproximadamente 20:1 caixas de câmbio e tinha mobilidade superior.
Finalmente, o material da lâmina foi alterado. Desta vez, eu queria usar materiais pré-endurecidos porque minhas tentativas de endurecimento foram abaixo da média. As lâminas padrão de 6 ″ foram feitas por jato de água de aço de mola 1075/74 duro 60C. Um conjunto alternativo de lâminas foi feito para tipos específicos de oponentes. Eles também eram feitos de materiais diferentes e tinham geometrias diferentes.

Fabricação
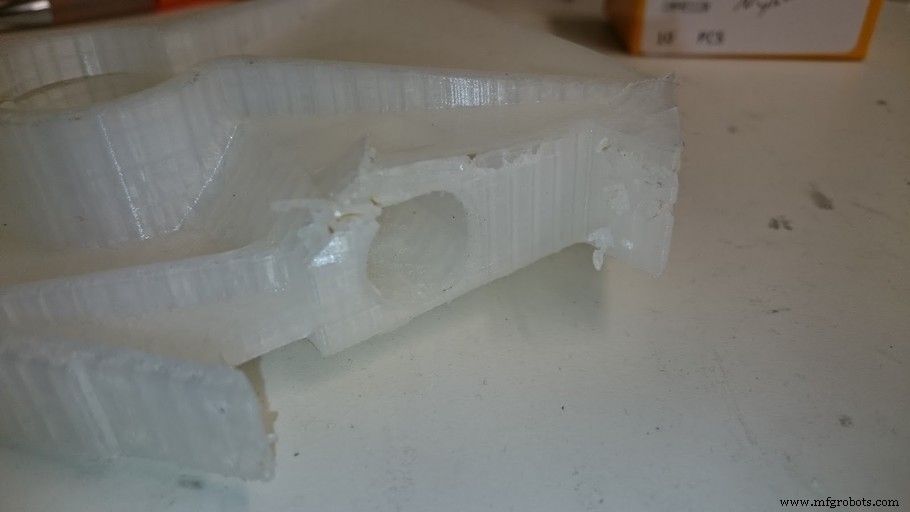
O quadro levou quase 36 horas para imprimir! A impressora atualmente é reconhecidamente lenta, especialmente com a adição de fibra. Embora o quadro certamente pudesse ter usado mais fibra, decidi otimizar para mais “altura” de fibra do que profundidade e, portanto, todas as camadas tinham fibra, mas apenas as camadas selecionadas tinham camadas completas.

O quadro precisava de alguma limpeza para permitir o encaixe adequado das peças. Quaisquer recursos de rebaixamento foram finalizados com uma ferramenta de lixa rotativa para limpar as áreas onde as estruturas de suporte foram colocadas. Isso era crítico para os motores de acionamento, orifícios dos parafusos e outros componentes a serem colocados.

Os componentes eletrônicos essenciais foram empacotados em um pequeno cubo que projetei usando minhas habilidades de nível de especialista em tetris. Este pequeno cubo contém um receptor Orange RX, um Turnigy Plush 10 ESC para a arma e dois controladores de motor Vex 29 para cada motor de ignição.

O cubo eletrônico se destina a caber no quadro dessa forma.

O motor foi reciclado da v2 e o robô foi conectado. Nenhum interruptor de alimentação dedicado foi usado, pois tive azar com os interruptores Fingertech recentemente e estava me sentindo cético; em vez disso, optei por usar uma conexão direta com a bateria.
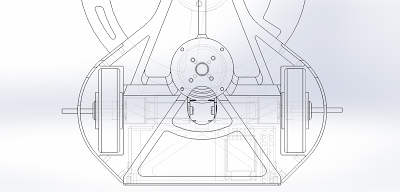
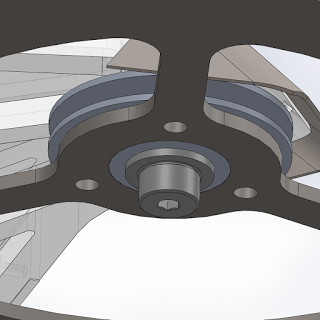
A interface da lâmina e da polia também foi modificada. Em vez de colocar o rolamento diretamente dentro do orifício da lâmina como feito anteriormente, os dois rolamentos seriam colocados no cubo e a lâmina aparafusada à polia. Um recurso redondo na polia acasalaria a lâmina concentricamente com a polia. Este método é melhor porque permite que as lâminas sejam trocadas sem desmontar todo o conjunto do eixo, reduz o desalinhamento porque a inclinação não depende mais do alinhamento da lâmina e da polia e reduz o choque dos rolamentos ao colocar um meio entre o diâmetro externo do rolamento e a lâmina.
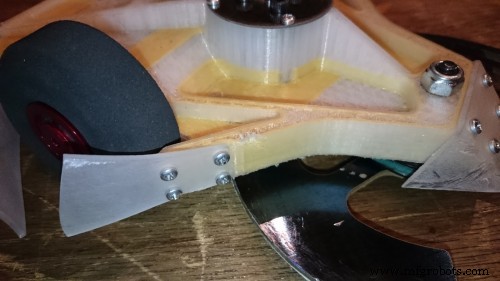
Por último, a armadura lateral foi feita para se encaixar nas laterais. Eles foram cortados de policarbonato 0,0625, que é resistente, mas flexível. No entanto, com este comprimento e espessura curtos, os lados eram difíceis de colocar e fortemente pré-carregados. Não tenho grandes esperanças quanto a isso; em antecipação, fiz várias cópias.


O peso final foi de 15,5 onças! Um peso muito confortável e algum espaço de manobra para melhorar.
Desempenho preliminar
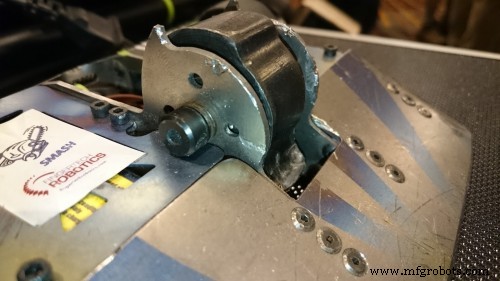
O DDT teve a oportunidade de destruir vários itens. No entanto, nenhum deles realmente pesava meio quilo. Ainda assim, esses testes demonstraram danos notáveis em UHMW, alumínio e até mesmo outras peças de nylon impressas em 3D. Eu não conseguia pensar em uma maneira melhor de enviar o frame v2 permanentemente!

Dragon Con 2015 Microbattles
A estreia do DDT v3 foi no Dragon Con 2015, onde teve quatro lutas e teve 3 vitórias, 1 derrota. Estou extremamente feliz com seu desempenho e a resiliência da moldura impressa. Eu meio que esperava que o cano da arma se abrisse depois de tantos acertos (incluindo acertos na parede da arena), mas continua tão verdadeiro quanto quando foi feito pela primeira vez, provavelmente devido em parte ao pesado enchimento de kevlar em torno das dimensões críticas. As lutas do DDT estão incorporadas abaixo. Tive muita sorte de não voar para fora da cava em várias ocasiões, mas infelizmente minha sorte acabou quando um golpe sólido em Algos lançou o DDT para a cova.
O DDT sofreu alguns danos do Green Reaper quando ele escalou a lâmina e começou a mastigar a estrutura. Fiquei surpreso ao ver que não houve muito dano, mas apenas porque minha lâmina o estava impedindo de empurrar a moldura, caso contrário, mais danos certamente teriam ocorrido; parte da fibra está exposta, o que significa que ele atingiu cerca de 0,6 mm de profundidade. Ambos os protetores de roda explodiram contra Algos, mas eu fui capaz de deixar uma boa marca em seu Ti 0,0625 de espessura antes de voar.


Eu quero encontrar mais oportunidades para o DDT desafiar outros antweights. Há duas competições se aproximando em outubro; Vou tentar o meu melhor para trazer o DDT para lá. Fique ligado!
impressao 3D