


A estrela-do-mar-robô do MIT CSAIL permite um estudo mais detalhado da vida aquática
Os cientistas inventaram uma 'estrela-do-mar-robô' que nos dá mais informações sobre a vida aquática, como relata Adam Conner-Simons, ou MIT CSAIL. (Veja o vídeo abaixo.)
Os biólogos há muito enfrentam os desafios de documentar a vida oceânica, com muitas espécies de peixes se mostrando bastante sensíveis aos movimentos subaquáticos dos humanos.
Como uma possível solução, os cientistas da computação vêm desenvolvendo robôs marinhos especiais que podem se mover furtivamente entre suas contrapartes baseadas em carbono. Em 2018, por exemplo, uma equipe do Laboratório de Ciência da Computação e Inteligência Artificial do MIT (CSAIL) fabricou um peixe robótico macio que nadava de forma autônoma com peixes reais ao longo dos recifes de coral de Fiji.
No entanto, a dinâmica complexa de como a água se move – e sua capacidade de arruinar rapidamente alguns sistemas eletrônicos perfeitamente bons – tornaram os robôs subaquáticos especialmente difíceis de desenvolver em comparação com os do ar ou da terra.
Com o peixe, a equipe do CSAIL teve que passar por meses de tentativa e erro para ajustar manualmente o design para que pudesse realmente funcionar de maneira confiável na água.
Embora esse robô fosse especialmente complexo, um grupo liderado pelos professores do MIT Wojciech Matusik e Daniela Rus ainda achava que havia espaço para acelerar o processo de produção. Com isso em mente, eles agora criaram uma nova ferramenta para simular e fabricar um robô funcional em questão de horas.
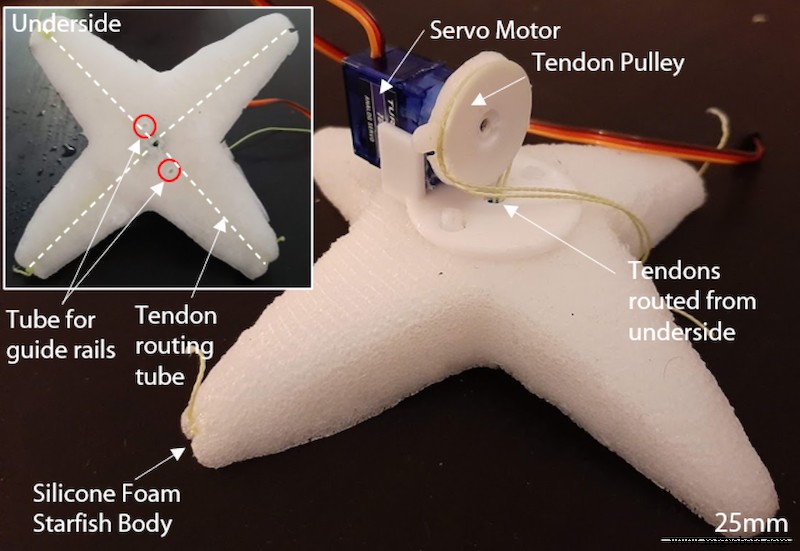
A equipe usou seu sistema para fazer uma estrela do mar robótica macia feita de espuma de silício e capaz de se mover com um único atuador de baixa potência. A estrela do mar se move por meio de tendões em suas quatro pernas, que são conectados a um servo motor que é usado para flexionar e relaxar as pernas.
A pós-doutoranda do CSAIL Josephine Hughes, coautora principal de um novo artigo ao lado do estudante de doutorado Tao Du sobre a estrela do mar, diz:“As interações passivas entre um robô subaquático e as forças do fluido ao seu redor – seja uma corrente calma ou uma onda ondulante – muito mais complicado do que quando um robô está andando em terreno estável, o que dificulta bastante a criação de seus sistemas de controle.
“Mas usando este simulador, um processo que normalmente pode levar dias ou semanas pode acontecer em apenas algumas horas.”
Du diz que a equipe escolheu um design de estrela do mar por causa da simplicidade e elegância de seu movimento, com o aperto e a liberação de suas pernas criando um movimento para frente.
No entanto, a equipe descobriu que o simulador funciona para uma variedade de tipos de corpo e, a seguir, eles explorarão designs inspirados em tartarugas marinhas, arraias manta e tubarões que envolvem estruturas mais complexas, como articulações, nadadeiras e nadadeiras.
A ferramenta do grupo envolve um modelo de aprendizado de máquina fazendo uma simulação inicial e projeto dos mecanismos de controle do robô, que é rapidamente fabricado.
Experimentos do mundo real com o robô são então usados para adquirir mais dados para melhorar e otimizar repetidamente seu design. O resultado é que o robô normalmente só precisa ser refabricado mais uma vez. (Um artigo separado sobre o desenvolvimento da ferramenta de simulação está atualmente em revisão.)
“Ao fazer simulação robótica, temos que fazer aproximações que, por definição, criam uma lacuna entre simulação e realidade”, diz Cecilia Laschi, professora de controle e mecatrônica da Universidade Nacional de Cingapura, que não participou da pesquisa.
“Este trabalho visa reduzir essa lacuna de realidade, com um loop misto de experimentos simulados e reais que é bastante eficaz.”
Para o corpo da estrela do mar, a equipe usou espuma de silicone por causa de suas propriedades elásticas, flutuabilidade natural e capacidade de ser fabricada de forma rápida e fácil. por um especialista humano.
De fato, Hughes diz que a equipe descobriu que o simulador parece empregar estratégias de controle que os humanos não teriam pensado em si mesmos.
“Com a estrela-do-mar robô, aprendemos que, além das propulsões de perna bastante visíveis que fazem, existem alguns movimentos mais sutis de alta frequência que podem dar um impulso importante”, diz Hughes.
O projeto se baseia em uma série de projetos CSAIL focados em robôs macios, que, segundo Rus, têm potencial para serem mais seguros, robustos e ágeis do que seus equivalentes de corpo rígido.
Os pesquisadores têm se voltado cada vez mais para robôs macios para ambientes que exigem movimentação em locais apertados, uma vez que esses robôs são mais resilientes na capacidade de se recuperar de colisões.
Laschi diz que a ferramenta da equipe pode ser usada para desenvolver robôs para medir dados em diferentes locais no oceano profundo e para prever robôs que podem se mover de novas maneiras que os pesquisadores ainda não pensaram.
“Robôs de inspiração biológica, como o robô estrela do mar e o SoFi, podem se aproximar da vida marinha sem perturbá-la”, diz Rus. “No futuro, ao projetar e construir rapidamente instrumentos robóticos de inspiração biológica, será possível criar observatórios personalizados que podem ser implantados no deserto para observar a vida.”
Du e Hughes co-escreveram o artigo com Matusik, Rus e o estudante do MIT Sebastien Wah. O artigo foi publicado esta semana no Journal of Robotics Automation Letters e também será apresentado virtualmente no próximo mês na International Conference on Soft Robotics (RoboSoft) do IEEE.
A startup de impressão robótica em metal 3D MX3D levanta € 2,25 milhões em novos financiamentos
IDS revela controle de tampa baseado em câmera com IA para indústria de bebidas e garrafas
Sistema de controle de automação
- Sepro apresenta seu primeiro robô ‘Made-in-America’
- Robôs na NPE:mais rápidos, mais fortes, mais inteligentes
- Mantendo os robôs ocupados
- Moldagem por injeção:Robôs e Cobots mais rápidos
- Robô e Cobot Makers estão se emparelhando
- Alcance do robô de 5 eixos de uso geral reprojetado
- Omron lança novo robô SCARA
- Nachi-Fujikoshi expande linha de séries de robôs compactos
- 5 coisas a considerar antes de comprar um robô
- Robôs recebem coordenação olho-mão