


Radar 360 (que codifica os dados em uma imagem)
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 |
Ferramentas e máquinas necessárias
| ||||
 |
|
Aplicativos e serviços online
 |
| |||
| |
|
Sobre este projeto
Estou aqui e vou mostrar como fazer um radar 360. Envie os dados para o computador, e após processá-los desenhe o Radar em tempo real e após uma volta (360 giros) salve o Radar anterior e desenhe o novo. e depois de tudo isso ENCODE os dados e os esconda em uma imagem. Por exemplo se você enviar apenas os dados codificados e alguém observar esta transferência de dados, ele descobrirá que você transferiu os dados ENCODED . Mas, se você ocultar os dados codificados em uma imagem, ele nunca descobrirá o que você fez e apenas pensará que você enviou uma foto para outra pessoa.
Etapa 1 (colete o que você precisa)
Neste projeto, você precisará de:
- Arduino (usei Uno R3)
- Servo motor (precisamos de 2 deles porque devemos ter 360 ° de movimento disponível)
- Sensor ultrassônico (usamos este para calcular a distância)
- Fios para que você possa conectar o sensor ultrassônico e o servo.
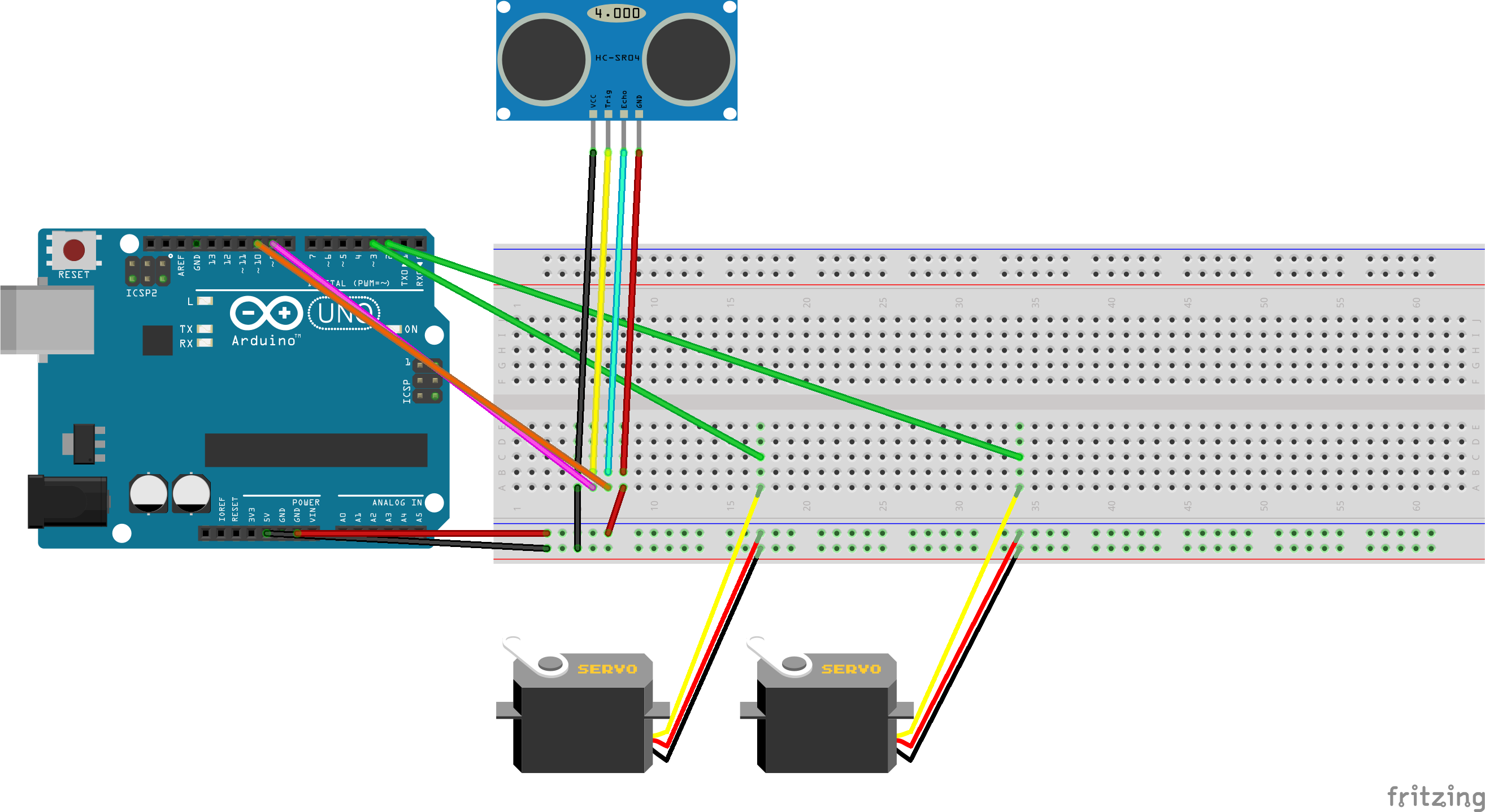
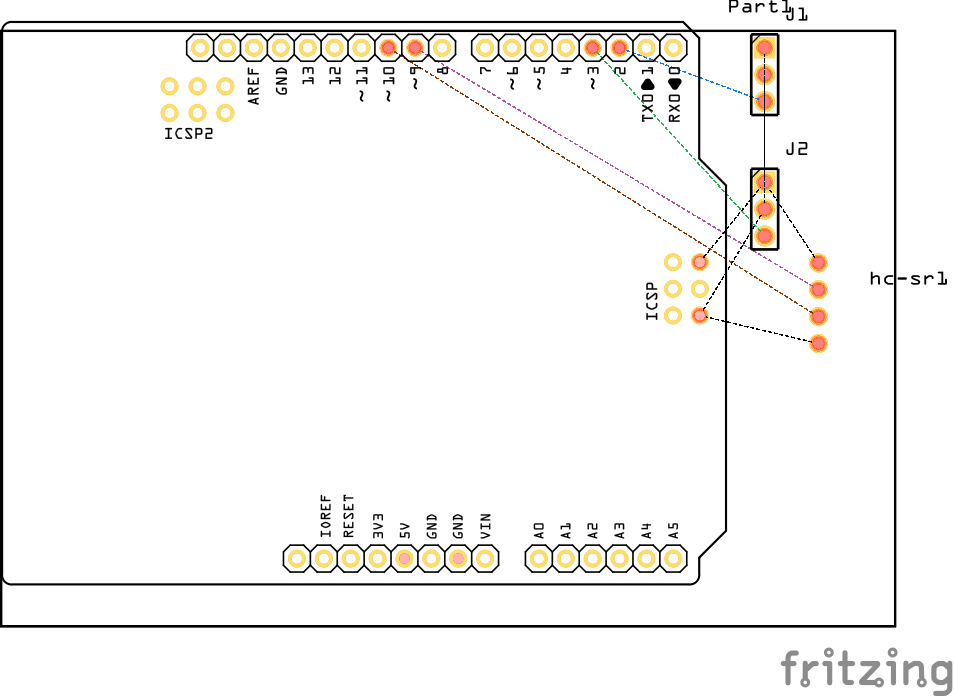
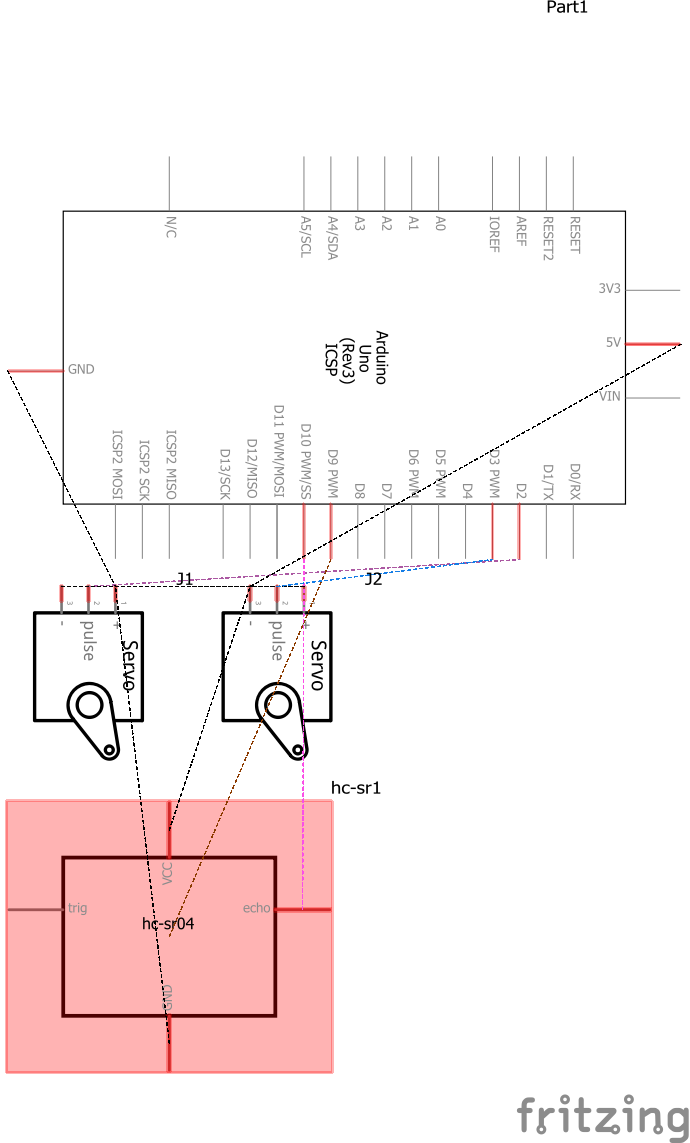
Etapa 2 (montá-los)
Conecte o servo e o sensor ultrassônico ao Arduino exatamente como no esquema abaixo (logo acima do código C ++). Você pode fazer o upload do código e vê-los no computador.
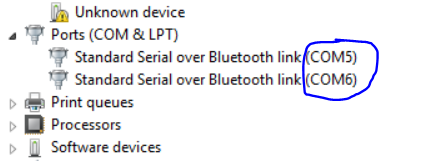
Atenção:Se você não sabe qual é o nome da porta, vá para o Gerenciador de Dispositivos e encontre as Portas. você pode ver o nome lá (COM3 ou COM5).
Se você terminar o projeto, é só me pedir para enviar o EXE do Gaveta do Radar.
* Atualizar *:Baixe o arquivo EXE nesta página.
Se você tiver problemas para trabalhar com EXE ou quiser fazer seu próprio EXE, é só me perguntar e eu estou aqui para ajudar.
Ao importar uma foto para codificar o AI, escolha o melhor método para torná-la mais precisa.
Código
- Servo controle
Servo controle C / C ++
Este código em C ++ é para controlar o servo e deve ser carregado no Arduino#includeServo para baixo; Servo para cima; const int trigPin =9; const int echoPin =10; longa duração; int pos =0; int pos2 =0; distância interna; int _degrees; configuração vazia () {pinMode (trigPin, OUTPUT); pinMode (echoPin, INPUT); Down.attach (2); Up.attach (3); Serial.begin (9600); } void loop () {Down.write (0); Up.write (0); para (pos =0; pos <=180; pos + =1) {Down.write (pos); _degrees =pos; dis (); atraso (50); if (pos ==180) {for (pos2 =0; pos2 <=180; pos2 + =1) {Up.write (pos2); _degrees =pos + pos2; dis (); atraso (50); }}} para (pos =180; pos> =0; pos - =1) {Down.write (pos); Up.write (pos); atraso (5); }} void dis () {digitalWrite (trigPin, LOW); atrasoMicrosegundos (2); digitalWrite (trigPin, HIGH); atrasoMicrosegundos (10); digitalWrite (trigPin, LOW); duração =pulseIn (echoPin, HIGH); distância =duração * 0,034 / 2; Serial.print (distância); Serial.print (","); Serial.println (_degrees); }
Peças personalizadas e gabinetes
Baixe o arquivo EXE aqui circular_draw_qP2ROsoPds.rarEsquemas
Processo de manufatura