


Tito - Robô impresso em 3D Arduino UNO
Componentes e suprimentos
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 20 | |||
 |
| × | 1 | |||
 |
| × | 16 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 6 |
Ferramentas e máquinas necessárias
 |
| |||
 |
| |||
 |
|
Aplicativos e serviços online
 |
| |||
 |
| |||
 |
|
Sobre este projeto
Se você não tem ou é difícil conseguir a peça, você pode simplesmente comprar nossos kits completos!
Visite www.ottodiy.com
Tito é um robô DIY dança Bi-ped, derivado de Zowi e Bob. Basicamente, foi adaptado para uma placa Arduino UNO padrão com conexões e suportes mais fáceis. Foi a primeira iteração para Otto DIY

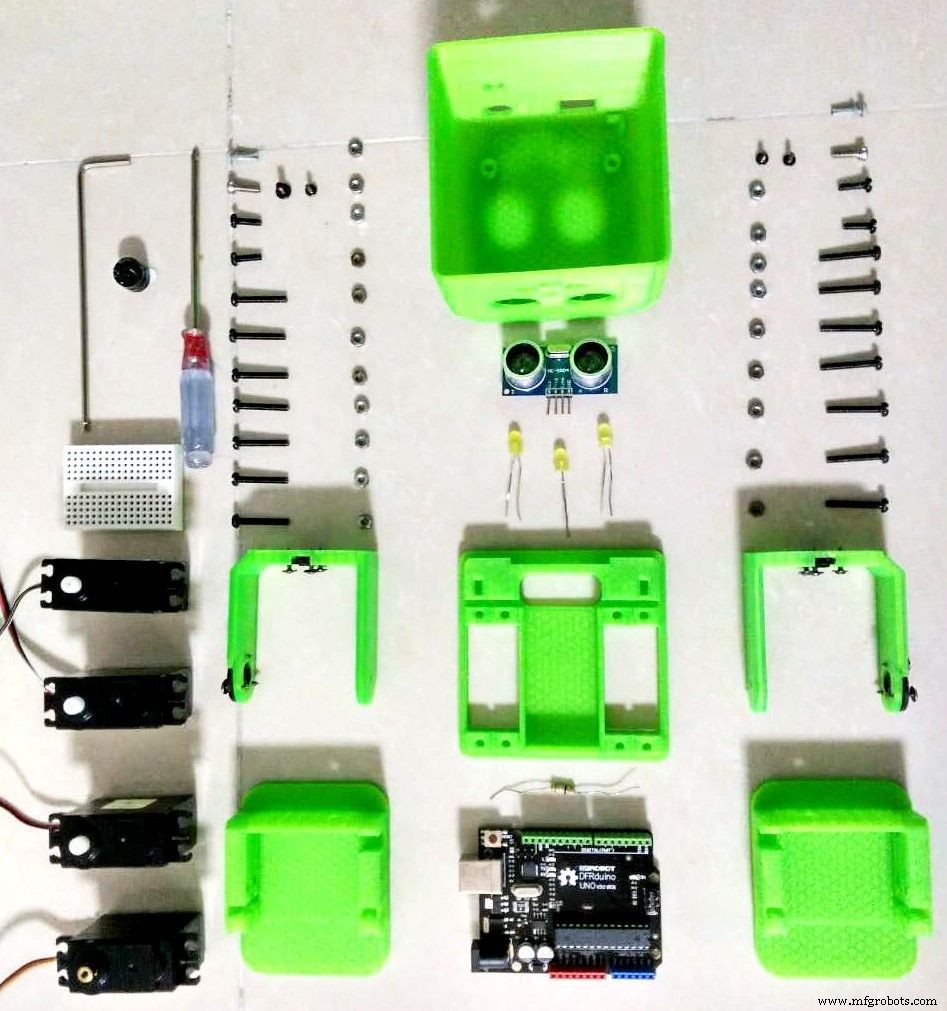
Ferramentas e materiais
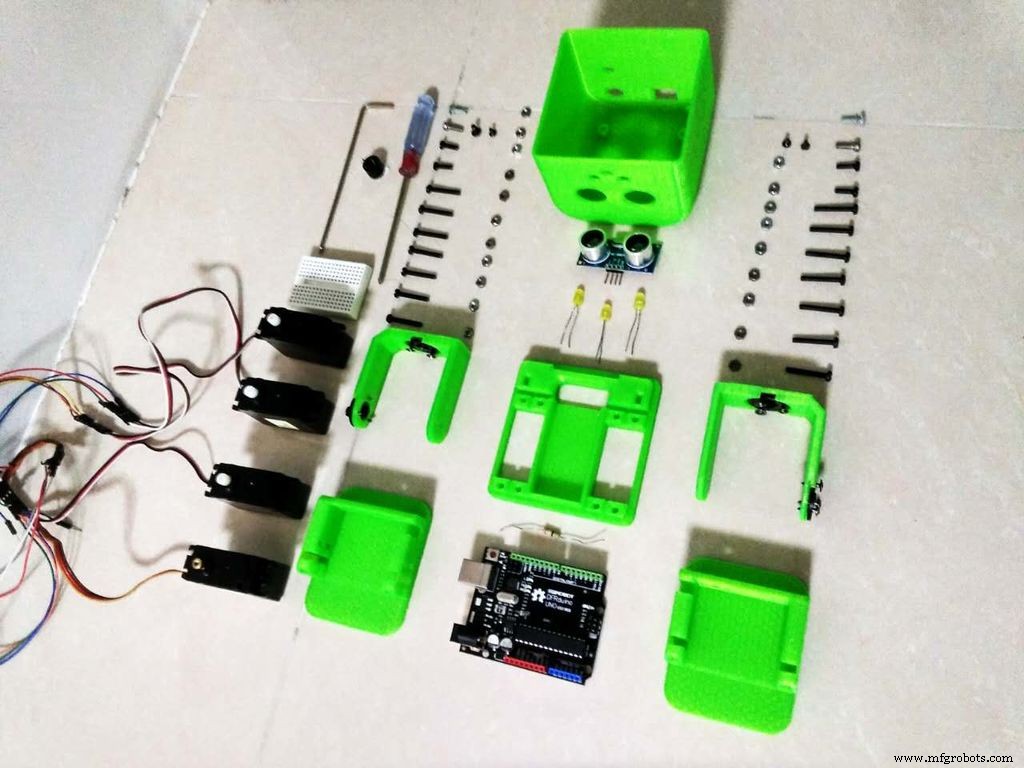
- placa Arduino UNO ou compatível (no meu caso, um DFRduino UNO)
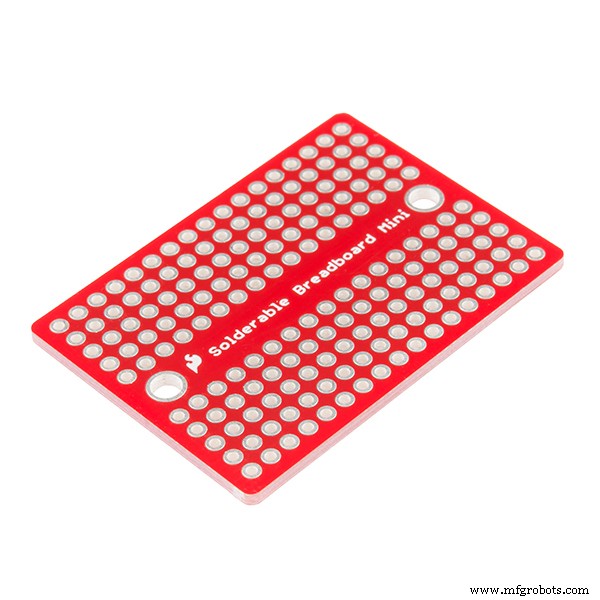
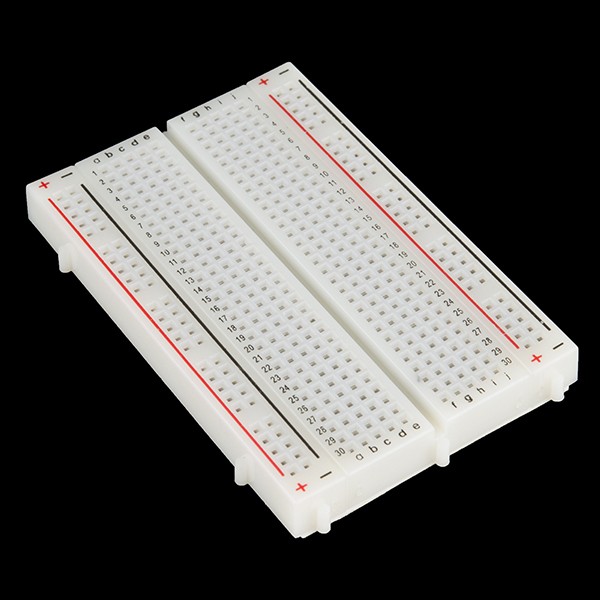
- Nano breadboard
- Buzzer
- Futaba servo S3003 x4
- Sensor de ultrassom HC-SR04
- Powerbank (opcional)
- Porca M3 x20
- Parafuso M3 x20
- Cabeça impressa em 3D
- Base impressa em 3D
- Perna x2 impressa em 3D
- Foot R impresso em 3D
- Pé L impresso em 3D
Ferramentas:
- impressora 3D
- chave Allen
- Chave de fenda
Peças de impressão 3D

Arquivos 3D.stl aqui. Encontre uma maneira de imprimir as peças em 3D, elas são projetadas para nenhum suporte, então é muito fácil de imprimir com 20% de preenchimento e resolução de 0,2 mm. Uma vez que Tito é totalmente de código aberto, você pode encontrar o projeto dos arquivos de modelo 3D feitos no Autodesk 123D Design aqui:
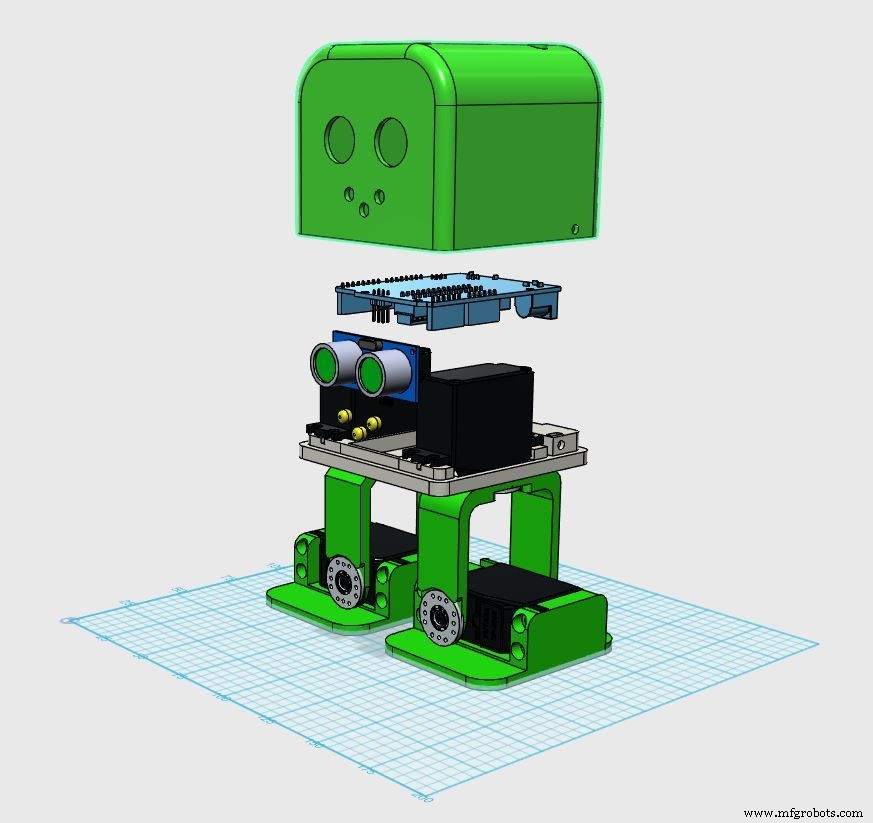
Pré-montagem
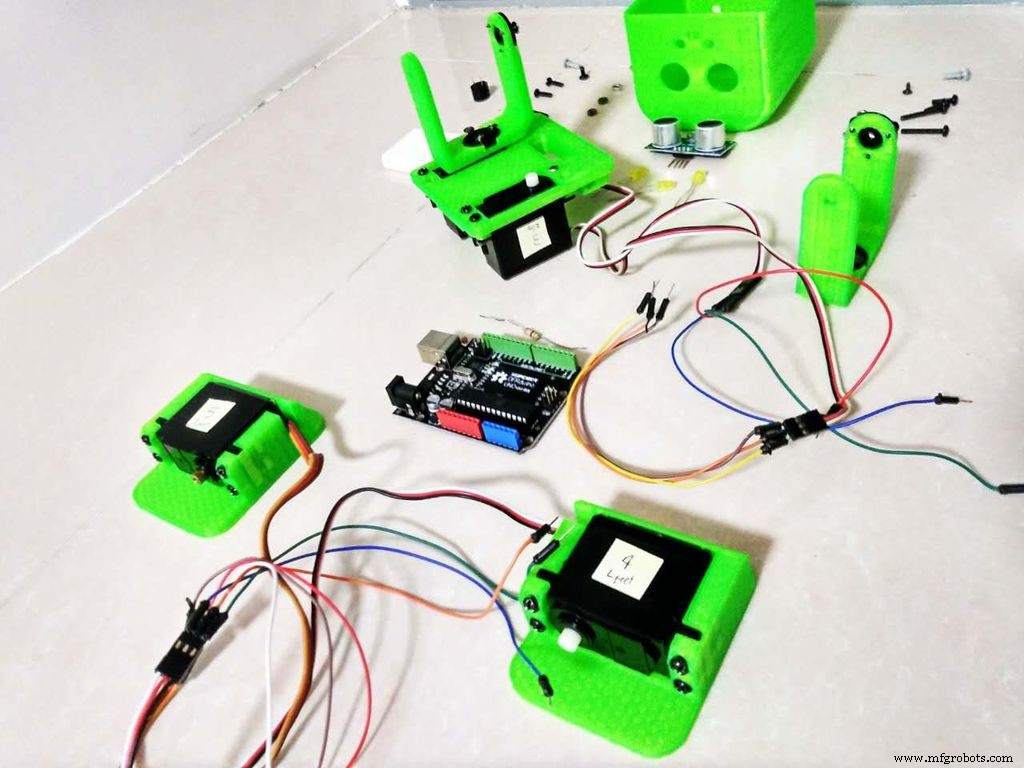
Existem várias formas de construir o Tito, mas uma recomendação é:antes de conectar os servos, monte as peças do servo disco nas pernas, depois coloque os servos no corpo e nos pés.
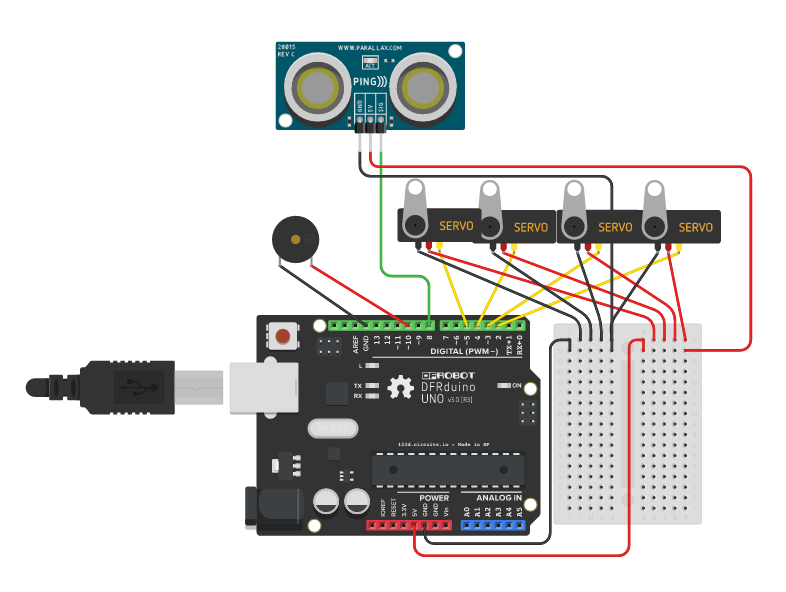
O Esquemático
Siga a foto para as conexões. Sensor de ultrassom HC-SR04 (trigonométrica para pino 8 e eco para pino 9). Durante o processo de criação, você pode precisar desconectar e conectar constantemente, portanto, mantenha este esquema presente para futuras correções.
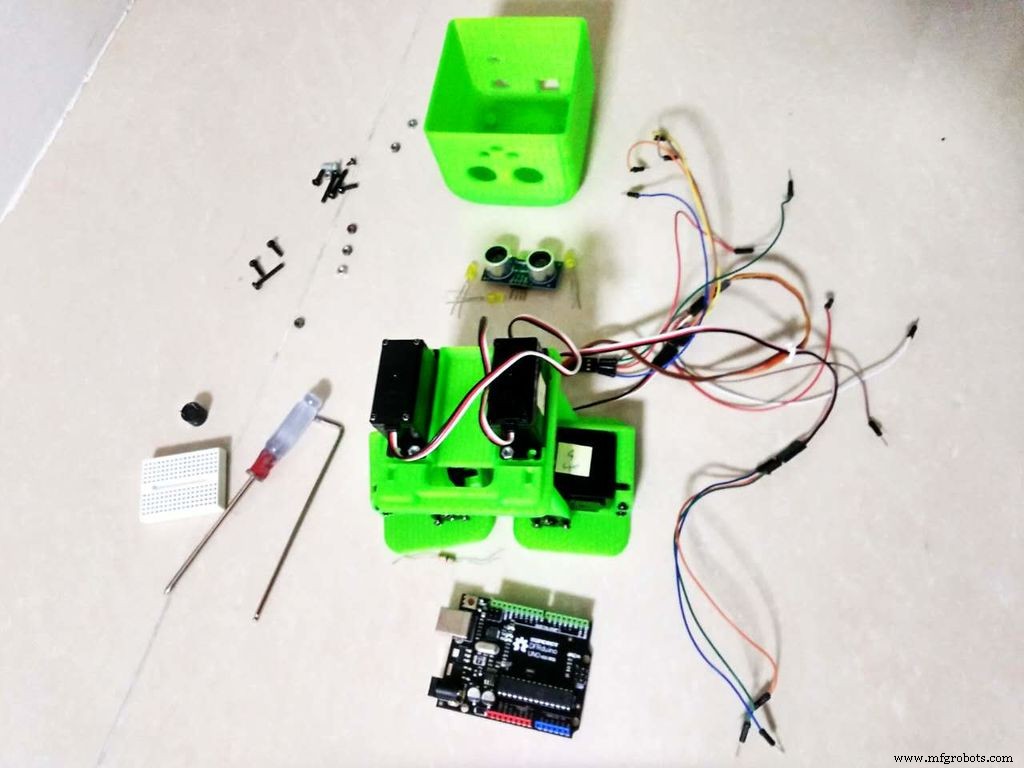
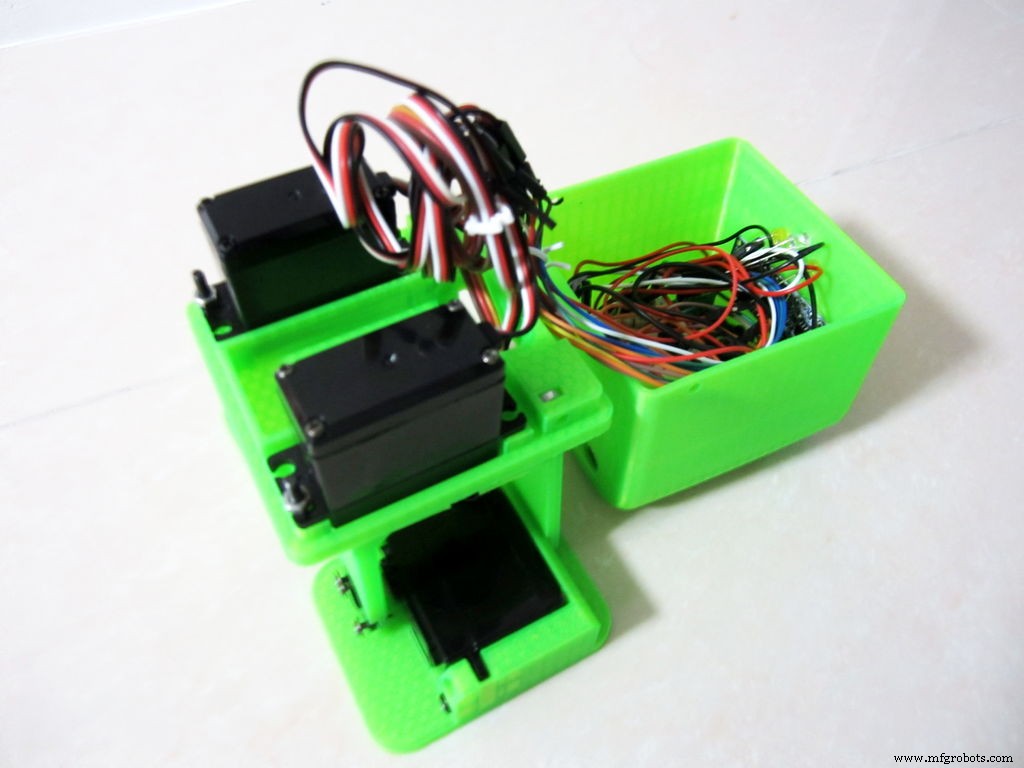
Teste a posição dos Servos

Na foto, os cabos estão desconectados mas a ideia aqui é fazer o upload de um código para a placa Arduino UNO que vai colocar todos os servos em 90 graus. Em seguida, combine o ângulo certo para os discos de manivela no corpo e nos pés. Tito deve estar na posição da foto. Então você pode consertar todos os servos com o eixo do parafuso.
Monte a placa Arduino UNO
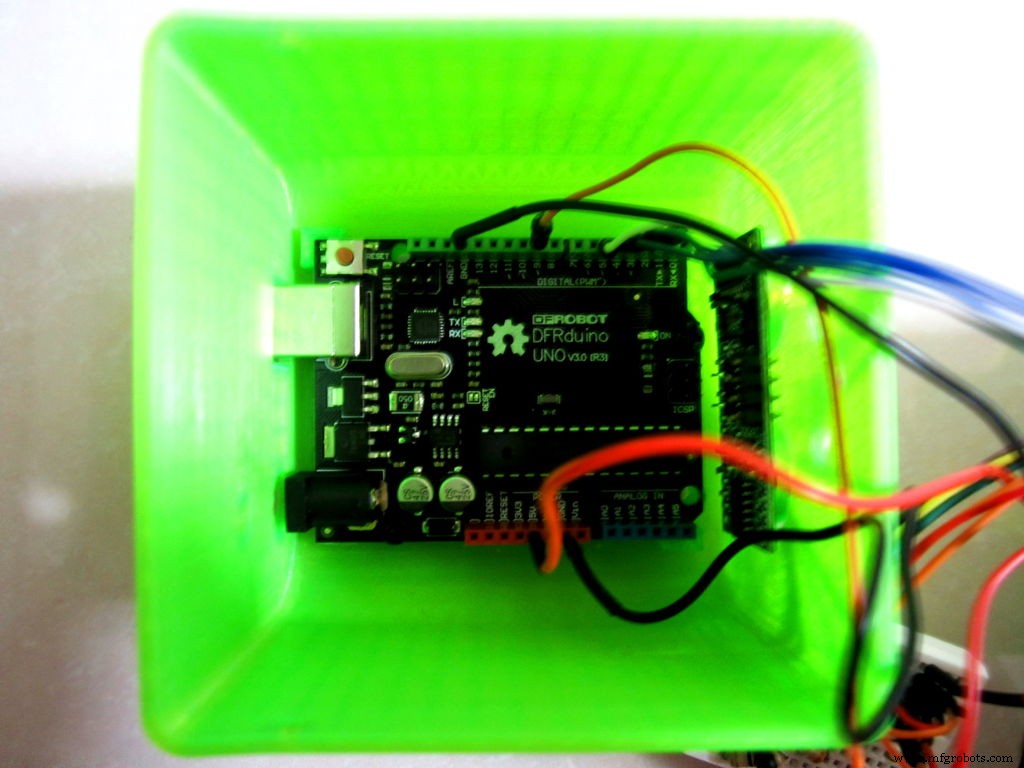
Este projeto facilita a fixação de qualquer placa compatível com Arduino Uno (no meu caso, um DFRduino UNO) na parte da cabeça, você pode usar até 4 parafusos.
Montagem final
Se todas as conexões estiverem firmes, você pode fechar a parte da cabeça e fixá-la ao corpo usando os parafusos laterais.
Programação do IDE do Arduino


Todas as bibliotecas e códigos de esboço estão neste repositório Github. Basta conectar o cabo USB ao Arduino UNO e fazer o upload dos códigos. Existem muitos movimentos programados para o robô, como caminhar em diferentes direções, ultrassom, levantar, inclinar e dançar.
poste seu remix e modificações na comunidade hackster ou Thingiverse
ottodiy.com
Código
Github
https://github.com/OttoDIY/OttoDIYPeças personalizadas e gabinetes
Thingiverse
Arquivo CAD em thingiverse.comEsquemas
Controle uma tela de 7 segmentos com um teclado!
Hackeando Qualcomm (Quick Charge) QC 2.0 / 3.0 com ATtiny85
Processo de manufatura