


Guia do posicionador de soldagem 2026:escolha de sistemas de 1, 2 e 3 eixos

Pela equipe editorial da EVST · Última atualização:11 de junho de 2026
Um posicionador de soldagem é uma máquina motorizada que gira, inclina ou levanta uma peça de trabalho para que cada costura de solda possa ser acessada em uma orientação plana ou horizontal – as posições que proporcionam a mais alta qualidade de solda e taxas de deposição. Os posicionadores são categorizados pelo número de eixos motorizados:as unidades de eixo único giram em um eixo, as unidades de dois eixos adicionam uma função de inclinação e as unidades de três eixos introduzem uma segunda rotação ou elevação vertical. A seleção da configuração correta depende da geometria da peça, do peso e se a soldagem é realizada por um operador humano ou por um robô.
Por que um posicionador de soldagem é importante
A qualidade da solda está intrinsecamente ligada à posição da solda. AWS D1.1, o código de soldagem de aço estrutural, especifica que as posições plana (1G/1F) e horizontal permitem maior corrente, deslocamento mais rápido e fusão superior porque a gravidade estabiliza a poça fundida. Um posicionador mantém as costuras nessas orientações favoráveis à medida que a soldagem avança, eliminando a necessidade do soldador ou do robô perseguir a costura ao redor de uma peça fixa.
Os benefícios são triplos:taxas de deposição mais altas a partir de parâmetros ideais, taxas de defeitos mais baixas ao evitar soldagem fora de posição (a principal causa de porosidade e falta de fusão) e tempos de ciclo reduzidos porque a peça indexa automaticamente para a próxima costura em vez de ser desfixada, girada e fixada novamente manualmente. Em uma célula robótica, um posicionador permite que um único braço solde geometrias complexas em um programa contínuo. Para uma visão mais ampla da soldagem robótica, consulte nosso guia de robôs de soldagem para a indústria pesada.
As três classes de posicionadores por contagem de eixos
Cada posicionador de soldagem se enquadra em uma das três famílias com base em seus eixos motorizados. A contagem de eixos determina quais junções podem ser apresentadas planas e define a primeira especificação para o dimensionamento da célula.
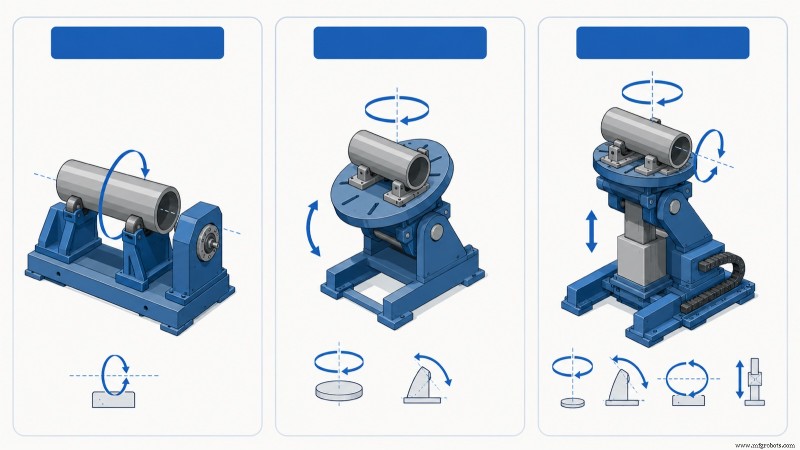
Posicionadores de eixo único
As unidades de eixo único fornecem um movimento motorizado único – geralmente rotação em torno de um eixo horizontal ou quase horizontal. Eles são a força de trabalho para peças cilíndricas e rotacionalmente simétricas, como tubos, reservatórios de pressão, flanges e eixos. A peça gira sob uma tocha fixa enquanto a costura permanece na posição plana, ideal para soldas circunferenciais. A linha de eixo único da EVST - Servoposicionador de caixa principal de eixo único, Servoposicionador horizontal de eixo único e Posicionador de soldagem de eixo único de cabeçote e cauda - fixa uma peça longa entre um cabeçote acionado e um cabeçote móvel de giro livre para que possa girar em sua própria linha central.
Posicionadores de dois eixos
Adicionando inclinação à rotação, as unidades de dois eixos giram e inclinam, permitindo que qualquer face de uma peça quadrada ou irregular seja colocada na posição plana. Esta classe é a mais versátil para fabricação geral, soldagens, suportes, estruturas e bases de máquinas com costuras em múltiplos planos. O catálogo de dois eixos da EVST inclui configurações tipo L, tipo U, tipo C e tipo plataforma, diferindo principalmente no suporte da mesa e na folga de inclinação em torno de peças volumosas.
Posicionadores de três eixos
Os posicionadores de três eixos combinam rotação, inclinação e um terceiro movimento motorizado – normalmente uma segunda rotação ou elevação vertical. O eixo adicionado mantém a costura não apenas plana, mas também em uma altura e orientação de trabalho constantes em relação a um robô, simplificando a programação em montagens grandes ou altas. A EVST lista servoposicionadores de três eixos com giro vertical e giro horizontal para essas aplicações pesadas e ricas em geometria.
| Classe | Movimentos motorizados | Adequado para | Emparelhamento típico |
|---|---|---|---|
| Eixo único | Somente rotação | Tubos, carcaças, flanges, eixos, costuras circunferenciais | Robô manual ou único, tocha fixa |
| Dois eixos | Rotação + inclinação | Soldagens, estruturas, suportes com costuras multiplanas | Manual ou robótico, fabricação geral |
| Três eixos | Rotação + inclinação + segunda rotação/elevação | Montagens grandes, altas ou ricas em geometria | Célula robótica, movimento coordenado |
Headstock/Tailstock vs Turntable:um ponto comum de confusão
Os compradores costumam perguntar se precisam de um “posicionador” ou de um “cabeçote/cabeçote móvel”. Esses termos descrevem como a peça é apoiada, em vez de categorias concorrentes. Um posicionador tipo mesa giratória apoia a peça em uma única mesa giratória, suspensa de um lado. Um arranjo cabeçote/cabeçote móvel suporta uma peça longa em ambas as extremidades – uma extremidade é acionada enquanto a outra fica ociosa – de modo que a peça gira em uma linha central estável, semelhante a um torno.
Comprimento e esbeltez ditam a escolha. Peças curtas e compactas cabem confortavelmente em uma única plataforma giratória. Eixos longos, vigas ou rotores cederiam ou chicoteariam se estivessem em balanço, tornando o cabeçote/cabeçote móvel a solução correta. Para peças extremamente longas, um contraponto com suporte motorizado próprio ou apoios intermediários estáveis mantém a deflexão dentro da tolerância. Na prática, os engenheiros da EVST frequentemente projetam configurações de duas estações:uma mesa de dois eixos para suportes compactos e um cabeçote/cabeçote móvel para estruturas longas, em vez de forçar uma única máquina a executar mal ambas as tarefas.
Especificações que orientam a seleção
Uma vez escolhida a classe, uma lista concisa de parâmetros determina a máquina exata. Esses são os números que um fornecedor precisa cotar e que um comprador deve comparar com a parte maior e mais pesada da família.
- Carga nominal — a massa máxima que a mesa carrega. Dimensione em relação à peça e seu suporte, não à peça nua.
- Centro de gravidade e excentricidade — a capacidade de carga diminui à medida que o centro de gravidade da peça se afasta da face da mesa e do eixo de rotação. Um posicionador classificado para uma carga com o CoG no eixo pode ficar sobrecarregado quando a mesma massa é montada fora do centro.
- Velocidade de rotação e torque — deve corresponder à velocidade de soldagem para o maior diâmetro, garantindo que a velocidade da superfície na costura permaneça dentro da janela do processo.
- Alcance e velocidade de inclinação — para unidades de dois e três eixos, o curso angular que nivela cada costura, geralmente até 90 ou 135 graus, dependendo do tipo de estrutura.
- Diâmetro da mesa e padrão de ranhura em T — define como o acessório é montado e o tamanho máximo da peça que a face suporta.
- Caminho atual do solo/anel coletor — para soldagem, o posicionador deve transportar corrente através da junta rotativa sem formar arco através dos rolamentos, o que é fornecido por um anel coletor classificado para soldagem.
O erro de dimensionamento mais comum é avaliar um posicionador apenas com base no peso da peça, ignorando a carga excêntrica. Uma peça pesada montada com sua massa deslocada do eixo de rotação impõe um momento de giro que o acionamento deve manter em todos os ângulos; exceder a inclinação nominal ou o torque de rotação causa travamento ou retrocesso sob carga. A EVST publica limites de carga e momento por modelo, mediante solicitação, em vez de um único número de título, porque o limite seguro depende da localização da massa.
Posicionamento manual versus robótico
Um posicionador atende a dois mestres distintos. Numa oficina manual ou semiautomática, ele simplesmente apresenta a costura a um soldador humano em uma altura e ângulo confortáveis, com o operador controlando a indexação. Em uma célula robótica, o posicionador se torna um eixo de movimento coordenado:o controlador do robô aciona o posicionador e o braço juntos para que a tocha e a costura se movam em conjunto, mantendo o ângulo de trabalho ideal através de soldas curvas ou compostas.
O movimento coordenado distingue um posicionador de soldagem robótico de uma simples mesa giratória. Ele exige que os servoeixos do posicionador sejam controlados ou totalmente sincronizados com o controlador do robô, e é por isso que os posicionadores de nível robótico usam servoacionamentos com encoders absolutos em vez de motores de frequência variável. Para uma construção completa da célula - incluindo fonte de energia, robô e cotação do posicionador - consulte o guia de seleção de células do robô de soldagem da EVST.
Como escolher:um caminho de cinco etapas
- Perfil da família de peças. Liste as partes maiores, mais pesadas e mais complicadas que a célula deve suportar. Dimensione para o pior caso, não para a média.
- Corrija a contagem de eixos. Rotação somente para peças cilíndricas; adicione inclinação para costuras em vários planos; adicione um terceiro eixo somente quando uma geometria grande ou alta exigir uma altura de trabalho constante sob um robô.
- Escolha o método de retenção. Plataforma giratória única para peças compactas; cabeçote/cabeçote móvel para peças longas ou finas que podem desviar.
- Confirme a carga com excentricidade. Verifique a carga nominal no deslocamento real do centro de gravidade, incluindo o acessório, e não apenas o peso da peça desencapada no eixo.
- Corresponda à interface de soldagem. Anel coletor com classificação de soldagem para caminho de corrente, servocontrole para coordenação do robô e velocidades de deslocamento que se alinham ao seu processo.
Para obter um passo a passo modelo por modelo da linha de posicionadores da EVST em relação aos requisitos de carga útil e inclinação/rotação, com um caminho para uma cotação, consulte o guia complementar, Seleção de posicionador de soldagem EVST 2026. Para comparar um posicionador com máquinas alternativas de manuseio de peças, leia posicionador de soldagem vs mesa giratória vs manipulador.
Gama de Posicionadores de Soldagem da EVST
A EVST, com sede em Chengdu e fabricação em Wenling, produz posicionadores de soldagem em todas as três classes de eixos como parte de seu portfólio de soldagem robótica. A linha publicada abrange unidades de eixo único (servo de caixa principal, servo horizontal e cabeçote e cauda), unidades de dois eixos (tipo L, tipo U, tipo C e tipo de plataforma) e servoposicionadores de três eixos (giro vertical e giro horizontal). As classificações de carga, os tamanhos da mesa e as faixas de inclinação são cotadas por aplicação, mediante solicitação, porque a capacidade segura depende da geometria da peça e do deslocamento do centro de gravidade, e não apenas da massa.
De acordo com o registro de certificação da EVST, sua linha de produção robótica e de automação de soldagem possui certificação de qualidade automotiva IATF 16949, e seus produtos possuem certificações de terceiros CE, SGS e TUV. Os posicionadores são normalmente fornecidos como parte de uma célula de soldagem completa junto com os robôs de soldagem QJAR da EVST e integração de fonte de energia, de modo que os eixos de rotação e inclinação são comissionados como movimento coordenado com o braço, em vez de como uma mesa independente.
Perguntas frequentes
Para que serve um posicionador de soldagem?
Um posicionador de soldagem gira, inclina ou levanta uma peça de trabalho para que cada costura de solda possa ser colocada na posição plana ou horizontal, onde a qualidade da solda e a taxa de deposição são mais altas. Ele melhora a qualidade da soldagem, aumenta o rendimento evitando a soldagem fora de posição e, em uma célula robótica, permite que um braço solde uma peça complexa em um único programa contínuo.
Qual é a diferença entre posicionadores de um, dois e três eixos?
Um posicionador de eixo único gira a peça em um eixo, adequado para peças cilíndricas e costuras circunferenciais. Um posicionador de dois eixos adiciona inclinação, para que as costuras em múltiplas faces de uma peça quadrada possam ser apresentadas planas. Um posicionador de três eixos adiciona uma segunda rotação ou elevação vertical, usado em montagens grandes ou altas onde um robô precisa que a costura seja mantida em altura e orientação constantes.
Quando preciso de um cabeçote/cabeçote móvel em vez de uma plataforma giratória?
Use um cabeçote/cabeçote móvel quando a peça for longa ou delgada, como um eixo, viga ou rotor, que cederia ou chicotearia se fosse apoiada apenas em um lado. O cabeçote acionado e o cabeçote móvel em marcha lenta mantêm a peça em uma linha central estável para que ela gire corretamente. Peças curtas e compactas podem ser colocadas em uma única plataforma giratória.
Como dimensionar corretamente um posicionador de soldagem?
Dimensione em relação à peça maior e mais pesada da família, incluindo sua fixação, e verifique a carga nominal no deslocamento real do centro de gravidade, e não apenas o peso bruto no eixo de rotação. A carga excêntrica impõe um momento de giro que o acionamento deve manter em todos os ângulos; ignorá-lo é o erro de dimensionamento mais comum. Confirme o torque de rotação e inclinação em relação ao deslocamento do pior caso com o fornecedor.
Um posicionador de soldagem pode funcionar com um robô?
Sim. Em uma célula robótica, o posicionador se torna um eixo de movimento coordenado acionado ou sincronizado com o controlador do robô, de modo que a tocha e a costura se movem juntas para manter o ângulo de trabalho ideal. Os posicionadores de nível robótico usam servoacionamentos com codificadores absolutos e um anel coletor classificado para soldagem para transportar corrente através da junta rotativa. Isto é o que distingue um posicionador de soldagem robótico de uma simples mesa giratória.
Onde ir a seguir
Para combinar um posicionador com uma carga útil específica e requisitos de inclinação/rotação com um caminho para uma cotação, consulte o guia do site do produto EVST para seleção do posicionador de soldagem EVST de um a três eixos. Para decidir entre um posicionador e outras máquinas de manuseio, leia posicionador de soldagem versus mesa giratória versus manipulador. Para a célula de soldagem robótica completa, consulte nosso guia do robô de soldagem e o guia de seleção de células. Para questões de aquisição, as vendas da EVST podem ser contatadas através da página de contato.
Sobre o autor:A equipe editorial da EVST escreve sobre robótica industrial e manufatura inteligente para engenheiros e líderes de operações que avaliam projetos de automação. A EVST (EVS TECH CO., LTD), fundada em Chengdu em 2018, já entregou mais de 600 projetos de automação e envia para mais de 100 países, com certificação de nível automotivo IATF 16949 e certificações de terceiros CE/SGS/TUV nas famílias de produtos QJAR, robô colaborativo, SCARA e delta.
Posicionador, plataforma giratória ou manipulador? Guia especializado para automação de soldagem 2026
Cobot vs Robô Industrial:Qual escolher em 2026
Robô industrial
- O que é um Cobot? Um guia para robôs colaborativos
- Quando usar o RoboDK para Desktop vs Web vs Mobile vs Embedded
- Robótica Industrial:Uma Introdução e Guia para Iniciantes
- TwinBox da RoboDK:a solução compacta e confiável para integração perfeita de robôs de produção
- Processamento de carne com Motoman Robotics
- Riscos e recompensas de robôs colaborativos
- Robôs SCARA:Guia para o robô mais versátil e procurado
- Um pouco sobre servoamplificadores
- Guia de peças e componentes do robô e como obtê-los
- GMAW vs. FCAW – As vantagens e desvantagens