


Abordagem torna os agentes não tripulados autossuficientes
Pesquisadores desenvolveram uma abordagem que permite que um veículo aéreo não tripulado de asa rotativa (UAV) pouse em um veículo terrestre não tripulado em movimento (UGV) sem o auxílio de GPS e recarregue antes de seguir em frente. Equipes de agentes aéreos e terrestres autônomos permitirão operações em ambientes de busca e salvamento que são muito remotos ou perigosos para humanos, mas muitas vezes exigem uma extensa infraestrutura de posicionamento e comunicação.
Uma função crítica dos UAVs é pousar de forma autônoma em veículos terrestres estáticos e em movimento, recarregar e depois decolar para realizar novas missões. Os UAVs não poderão confiar no GPS, pois é facilmente interrompido, portanto, esses comportamentos precisarão ser realizados usando outras fontes, como visão a bordo.
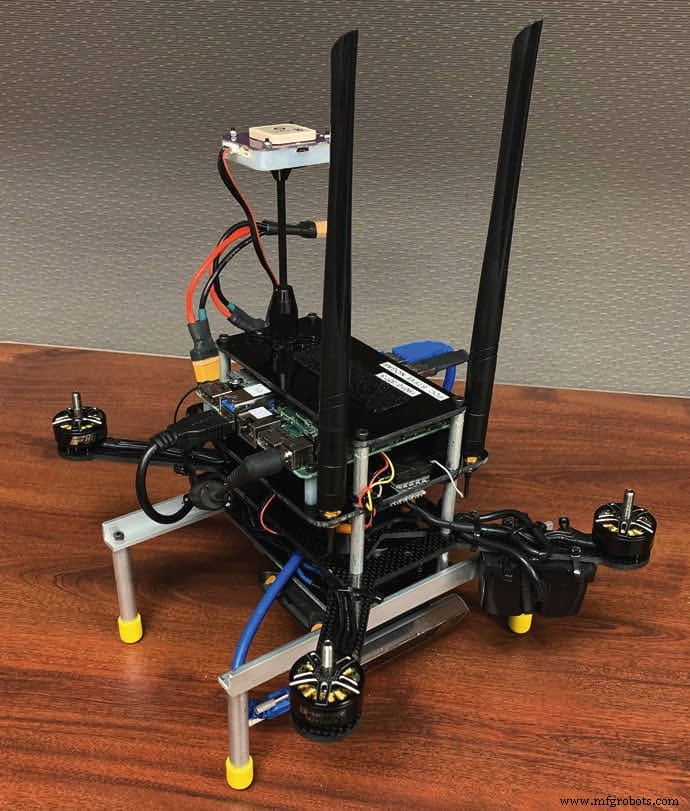
Os pesquisadores realizaram cálculos a bordo do veículo usando sensores e computadores de baixo custo. Além disso, nenhuma comunicação ocorreu entre o UAV e o UGV. A equipe realizou simulações de software no circuito e experimentos ao ar livre e demonstrou que o algoritmo é eficaz na realização de manobras de pouso. Usando um quadrotor pequeno e personalizado e um UGV em velocidades de corrida, os pesquisadores experimentaram pousos.
O trabalho combina comportamentos negados por GPS e um comportamento comprovado experimentalmente. Ele usa localização baseada em visão com odometria inercial visual, um marcador exclusivo no topo do veículo terrestre projetado para esta aplicação e comportamentos e controle a bordo. Além disso, esses comportamentos foram realizados a bordo de um pequeno UAS com restrições computacionais significativas.
O marcador personalizado na parte superior do veículo terrestre é projetado especificamente para a tarefa de pouso. Ele contém marcadores menores dentro do marcador maior que ainda podem ser vistos mesmo quando a câmera se aproxima do marcador. A abordagem poderia reduzir a dependência do marcador fiducial em cima do veículo terrestre e substituí-lo por inteligência artificial que reconhece o veículo em que deseja pousar.
Sensor
- O que é um alternador?
- Agentes de software portátil:Uma abordagem ‘Goldilocks’ para conectividade IoT
- O que torna um inovador?
- Detector de aerossol de agente rápido para agentes biológicos
- EV vs. ICE:como o design do chicote elétrico difere?
- Adaptador torna todos os fones de ouvido inteligentes
- Veículo aéreo não tripulado de alta altitude (UAV) para monitoramento de parâmetros meteorológicos
- Porta de carregamento para enxames de drones autônomos
- O público está pronto para um veículo autônomo de nível 4?
- O que é um Chassi Ground?