


Motor do driver L293D:como conectá-lo a um motor DC usando Arduino
Suponha que você pretenda projetar um robô ou um carro de brinquedo, o conhecimento sobre motores é primordial. Uma maneira muito econômica e fácil de controlar esses motores é usar uma blindagem do motor do driver L293D. Melhor ainda, use-o em uma interface com um microcontrolador como o Arduino.
Entre os outros, o driver do motor L293D é um dos chipsets mais populares do gênero. Mais ainda, por suas diversas aplicações em construções eletrônicas, como servos, motores de passo e motores CC. No entanto, seu atributo crucial parece ser seu controle de direção e velocidade em dois motores DC independentes. E é sobre isso que você aprende mais adiante neste instrutivo.
1. O que é o driver do motor L293D?
Este chipset de 16 pinos é um driver de ponte H de dois canais para motores. Muitas vezes, sua função principal é como uma interface de controle para pares de motores CC ou em um único motor de passo.
Por padrão, o chipset de proteção do driver do motor L293D vem em dois. Portanto, é capaz de acionar quatro motores DC. Por esse motivo, o chipset L293D é um valioso ativo de construção em robôs de quatro rodas.
No total, o escudo oferece quatro pontes H. Portanto, cada ponte h fornece uma corrente de motor de 0,6 A. Além disso, o registrador de deslocamento 74HC595 é um recurso da segurança. Este registro, como resultado, estende os oito pinos de controle do dual L293D IC para os pinos de quatro dígitos do Arduino.

(Um driver de motor L293D de 16 pinos de ponte H quádrupla de alta corrente).
2. Recursos do driver de motor l293D
Alguns recursos que tornam o driver de motor L293D um componente tão bom em projetos de CNC e robôs incluem:
- Permite controlar os níveis de direção e velocidade no dispositivo aplicado.
- O mais interessante é que o driver possibilita a operação de dois motores DC duplos semelhantes.
- A tensão do motor, Vs. (Vcc2) está entre 4,5 V e 36 V.
- Além disso, a corrente máxima contínua do motor é de 600mA.
- Por outro lado, o pico máximo de corrente do motor é 1,2A.
- A tensão de alimentação Vss(Vcc1) varia entre 4,5 V e 7 V.
- O tempo de transição é de 300 ns entre 5 V e 24 V, no máximo.
- Através da ativação térmica, é possível acionar o desligamento automático.
- Finalmente, o IC está disponível em pacotes de SOIC, DIP e TSSOP.
3.L293D Motor Driver Shield Configuração do pino de saída
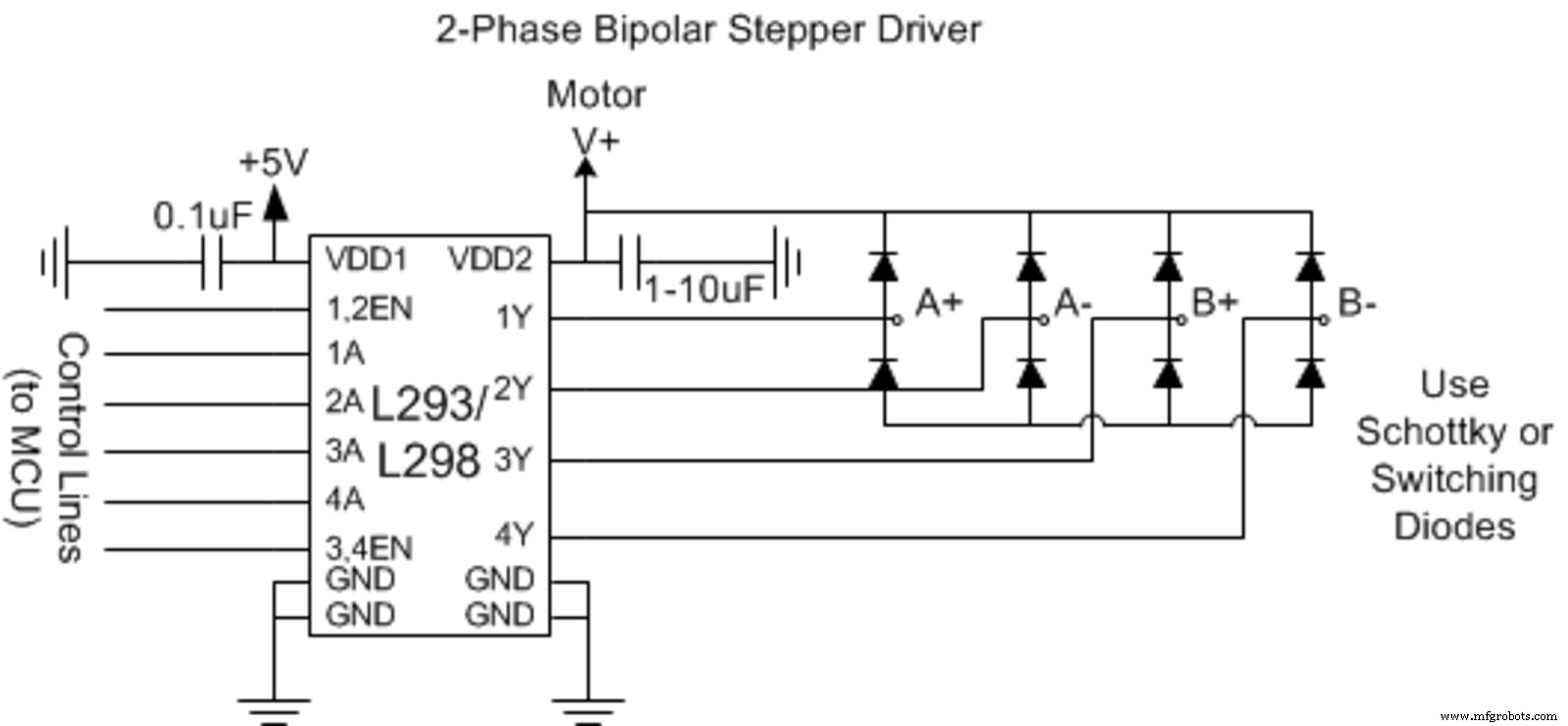
(Um diagrama de pinos esquemático mostrando um driver de motor de passo L293D bipolar).
| Número do PIN | Nome do Pin | Descrição do pino |
| 1 | Ativar 1,2 | Este terminal ativa os pinos de entrada:Entrada 1(2) e Entrada 2(7). |
| 2 | Insira o pino 1 | Funciona como um controle direto para o pino de saída 1. Muitas vezes, você acha aplicável no controle de circuitos digitais. |
| 3 | Pino de saída 1 | Este pino se conecta a uma extremidade, Motor 1. |
| 4 | Terra | Em uma extremidade, este pino vai para o terra do circuito (0V). |
| 5 | Terra | Temos este outro pino terra (0V) do outro lado. |
| 6 | Pino de saída 2 | Como no pino de saída 1, este terminal se conecta à outra extremidade do Motor 1. |
| 7 | Insira o pino 2 | Ele controla diretamente o pino de saída 2. Também é aplicável em controles de circuitos digitais. |
| 8 | Vs. (Vcc2) | Com uma classificação de 4,5V-36V, ele se conecta ao pino de tensão e alimenta os motores. |
| 9 | Ativar 3,4 | Este terminal habilita apenas os pinos de entrada:Entrada 3(10) e Entrada 4(15). |
| 10 | Entrada 3 | Ele oferece controle direto para a saída 3 pinos. Além disso, funciona como outra saída de controle de circuito digital. |
| 11 | Saída 3 | Este pino se conecta a uma extremidade do Motor 2. |
| 12 | Terra | Aqui, o pino terra conecta o terra do circuito (0V) |
| 13 | Terra | Mais um pino terra conectado ao terra do circuito (0V) |
| 14 | Saída 4 | Como a Saída 3, este pino também vai para a outra extremidade do Motor 2. |
| 15 | Entrada 4 | Neste fim, oferece controle direto para a saída de 4 pinos. Ele também funciona como um controle de circuito digital. |
| 16 | Vss (Vcc2) | Por fim, o pino se conecta a uma tensão externa de +5V responsável por alimentar o IC. |
4. Princípio de Funcionamento do Motorista L293D
Conforme destacado anteriormente, o driver do motor L293D pode controlar motores DC duplos. Portanto, é essencial entender como esse IC de ponte H de canal duplo funciona.
(Um diagrama mostrando um motor unipolar de 5 volts conectado a um L293D).
A primeira etapa do princípio de funcionamento envolve a criação de uma ponte H. Em outras palavras, ele usa pares duplos de transistores Darlington que chamamos de Q2/Q3 e Q1/4. Do outro lado de cada um, um diodo se conecta ao coletor e emissor dos transistores. Como resultado, evita que o EMF gerado pelo motor danifique os transistores.
Assim, quando os transistores Q1/Q4 estão na posição ON, os transistores Q2/Q3 desligam. Assim, há fluxo de corrente de Vcc, através do motor e para o terra.
Esta ação solicita uma rotação no sentido horário/anti-horário do motor. Em resumo, a polaridade do motor e o modo de conexão à fonte de alimentação determinam o sentido de rotação.
Por outro lado, quando os transistores Q1/Q4 estão desligados, o Q2/Q3 liga automaticamente. Assim, há um reverso na corrente que flui através do motor. Assim, quando essa corrente reversa flui, o sentido de rotação do motor também se alterna.
5. Como usamos o driver de motor L293D?
Como mencionado anteriormente, o driver do motor L293D usa uma corrente de acionamento bidirecional de cerca de 600mA e uma faixa de 4,5V-36V. No entanto, esses recursos envolvem o uso deste chip de driver de motor de 16 pinos com o Arduino Uno.
Assim, apresentamos um projeto que conecta motores DC e L293D ao ARDUINO. Então, aqui está um procedimento passo a passo para definir o circuito que controla a direção e a velocidade do motor CC.
Primeiro passo:reúna os materiais necessários para o projeto.
- Dois potenciômetros de 10K.
- Chipset de driver de motor L293D.
- Dois motores CC pequenos.
- Arduino Uno ou Arduino Pro Mini.
- Breadboard.
- Fios de ligação.
Etapa Dois:Configurando o Circuito
As conexões envolvidas neste circuito são bastante simples.
No entanto, empregamos um tutorial em vídeo para configurar o circuito para uma ilustração mais precisa.
O motor geralmente fica melhor com uma fonte de alimentação diferente. Neste caso, usamos 12V para o motor. Por outro lado, uma fonte de 5V alimenta o L293D e o Arduino.
Nota:A fonte de alimentação externa vai para o pino 8 do L293D. Tome precauções ao fazer essas conexões. Caso contrário, você corre o risco de danificar os motores.
Etapa três:o código para programar um motor CC
Nós vamos fazer isso, e duas etapas básicas são necessárias.
Instale a biblioteca AFMotor.h.
Em primeiro lugar, precisamos de um meio de comunicação com o IC L293D. Para isso, temos que instalar a biblioteca AFMotor.h.
Essa biblioteca nos permite emitir comandos que controlam motores CC, solenóides e motores de passo.
Para instalar a biblioteca AFMotor.h, primeiro, role até Sketch. Em seguida, localize “Incluir Biblioteca”, após o qual você localiza “Gerenciar Bibliotecas”. O gerenciador de bibliotecas atualiza a lista de bibliotecas instaladas à medida que o gerenciador de bibliotecas faz download do índice.
Depois, use o filtro de pesquisa para encontrar ""Motor Shield". Entre as entradas, selecione a Biblioteca Adafruit Motor Shield da Adafruit e clique em Instalar.
Execute o código Arduino
Em seguida, temos que executar o código Arduino abaixo:
#include
AF_DCMotor(4);
void configuração()
{
//Configura a velocidade de partida para o motor e para
motor.setSpeed(200);
motor.run(RELEASE);
}
void loop()
{
uint8_ti;
// Liga o motor
motor.run(FORWARD);
// Acelera de 0 a velocidade máxima
para (i=0; i<255; i++)
{
motor.setSpeed(i);
atraso(10);
}
// Desacelera da velocidade máxima para 0
para (i=255; i!=0; i–)
{
motor.setSpeed(i);
atraso(10);
}
// Em seguida, altere a direção do motor
motor.run(ATRÁS);
// Acelera de 0 a velocidade máxima
para (i=0; i<255; i++)
{
motor.setSpeed(i);
atraso(10);
}
// Desacelera da velocidade máxima para 0
para (i=255; i!=0; i–)
{
motor.setSpeed(i);
atraso(10);
}
// Agora desligue o motor
motor.run(RELEASE);
atraso(1000);
}
Etapa 4:configuração concluída
Nesta fase, a configuração do seu circuito DIY está concluída. Agora você tem um mecanismo de controle para qualquer dispositivo de motor DC usando este chip L293D e o microcontrolador Arduino Uno.
6.L293D CI de temporizador duplo equivalente
Outros ICs semelhantes a L293D incluem ULN2003, SN754410, LB1909MC.
(Um IC ULN2003 em um PCB mostrando os pinos rotulados e os pontos de conexão)
7. As aplicações do L293D
- Ajuda você a conduzir dispositivos de LED de alta corrente.
- Além disso, é aplicável em motores de alta corrente operados por circuitos digitais, como robôs.
- O driver L293D é parte integrante de steppers e motores em geral.
- Para uso em módulos de driver de relé. Portanto, torna possível um relé de travamento.
Resumo
Existem outros métodos diferentes para controlar motores DC usando o Arduino de mais de uma maneira. No entanto, uma das maneiras mais fáceis é usar um IC de driver de motor L293D. Um IC L293D oferece uma vantagem para controlar simultaneamente a velocidade e a direção de dois motores DC separados.
Em conclusão, aprendemos como configurar e programar um motor CC com este CI. Mas, talvez, você queira tentar algo mais desafiador. Para obter mais tutoriais sobre como fazer isso, entre em contato com nossa página de contato para obter orientação completa.
Alarme de carro caseiro:os benefícios e como fazer o dispositivo
Circuito controlador de LED RGB:o princípio de funcionamento e como fazer um
Tecnologia industrial
- Sistema de detecção de humanos usando Arduino Uno
- Leitura do sinal PPM do receptor RC usando Arduino
- Brinquedo controlado pelo Android usando Raspberry Motor Shield
- Como medir a massa da Terra usando o Arduino
- Como criar um site de comunicação do Arduino usando PHP
- Braço do robô Arduino DIY - Controlado por gestos manuais
- Arduino - Desenho via Web usando o controlador de motor de passo
- Como funciona um motor CC escovado
- Como fazer uma bússola usando Arduino e IDE de processamento
- Como verificar um motor CC