


Trackpad USB controlado por Arduino
Componentes e suprimentos
 |
| × | 1 |
Aplicativos e serviços online
 |
|
Sobre este projeto
Cada vez que um novo Raspberry Pi é lançado, eu dou uma olhada nas especificações e penso comigo mesmo "Eu realmente quero fazer um laptop com isso", mas sempre surge um problema:nunca consigo encontrar um trackpad USB independente para o laptop. Portanto, neste projeto, iremos resgatar um trackpad de um velho laptop quebrado e convertê-lo em um dispositivo USB usando um Arduino Pro Micro.
Etapa 1:peças

As peças necessárias para este projeto são muito simples, vamos precisar de um trackpad de um laptop antigo, um micro Arduino e alguns fios. Infelizmente, existem apenas alguns sabores de Arduino que podemos usar, estes são o Arduino micro, pro micro e Leonardo, pois eles podem ser programados para aparecer como HIDs (dispositivos de interface humana), o que significa que podem aparecer no computador como um mouse ou teclado. Isso é algo que o Arduino Uno não pode fazer. Você pode obter o Arduino pro micro aqui:Aqui Quanto ao trackpad, se você preferir comprar um, ele pode ser encontrado aqui:Aqui
Etapa 2:Por que isso funciona

Portanto, podemos fazer a interface de um trackpad com um Arduino porque a maioria dos trackpads de laptops mais antigos se comunicava com o computador por meio de uma interface PS / 2, o que significa que o circuito do trackpad tem saídas PS / 2 que são dados e relógio, esses dados são então lidos pelo Arduino e convertidos em dados que podem ser enviados ao computador por meio da interface USB. Agora devo observar que nem todos os trackpads de laptop são iguais, quase todos os laptops mais antigos usam uma interface PS / 2, mas alguns mais novos usam interface USB em vez da interface PS / 2. Se você conseguir encontrar um desses trackpads USB em vez do PS / 2, você pode simplesmente pesquisar o nome do trackpad no Google e encontrar a pinagem USB e conectá-lo a um computador USB e ele funcionará. No entanto, para este projeto, usaremos o trackpad PS / 2 mais comum e um Arduino para transformá-lo em um mouse USB.
Etapa 3:Fiação



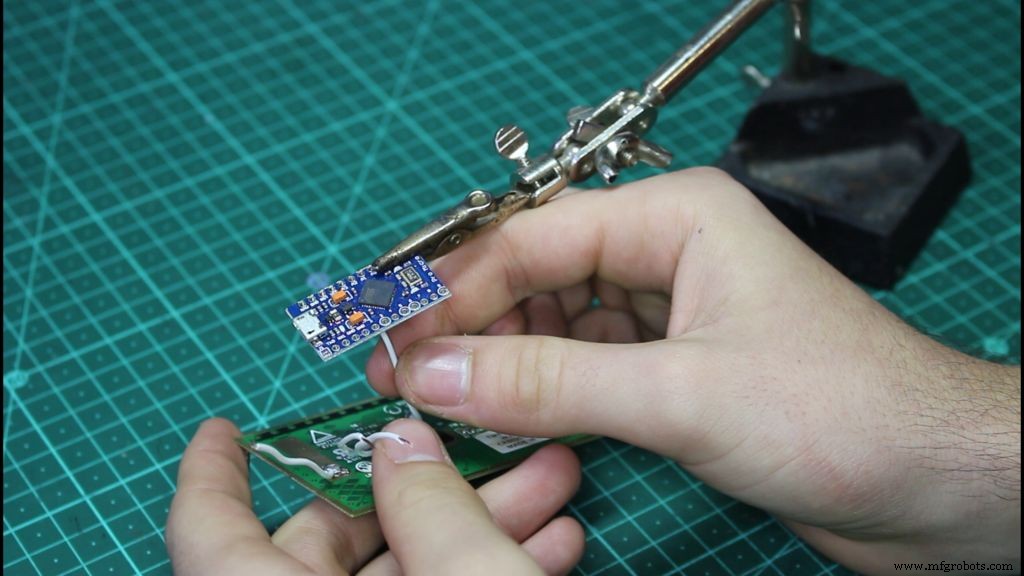
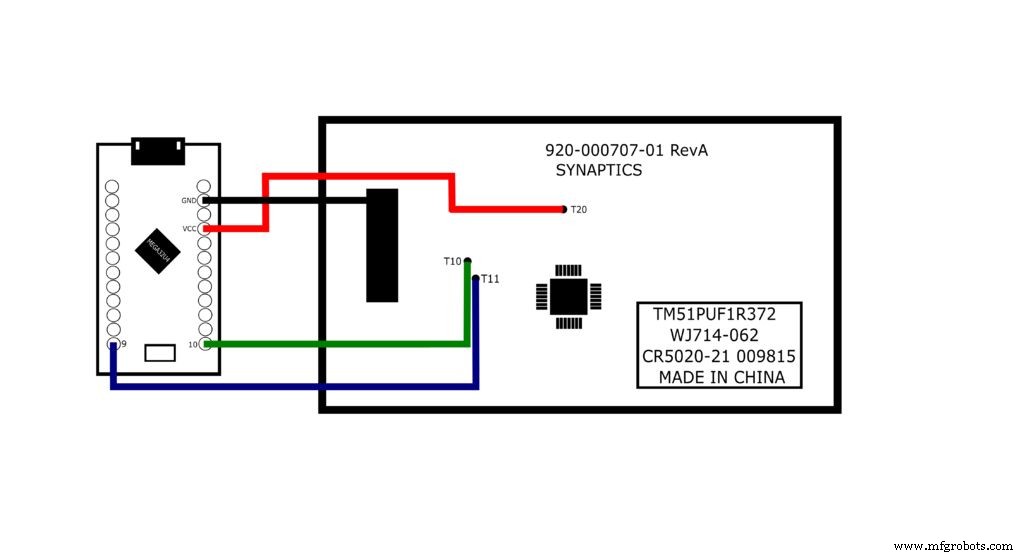
A fiação para este projeto é muito fácil, tudo o que precisamos fazer é encontrar 4 almofadas de solda em nosso trackpad. Eles são muito fáceis de encontrar, pois são rotulados como T10 (dados), T11 (relógio) e T20 e a conexão de aterramento é apenas um grande plano de metal exposto. Precisamos soldar cuidadosamente um fio em cada uma dessas almofadas e, em seguida, conectá-los aos pinos Arduino correspondentes.
- T10 se conecta ao pino 10 no Arduino micro
- T11 se conecta ao pino 9 no Arduino micro
- T20 se conecta a 5v no Arduino micro
- O plano de aterramento se conecta ao aterramento no micro Arduino
Depois de soldar os fios aos pads no trackpad, é crucial que você não coloque nenhuma pressão sobre esses pads, mesmo a menor pressão sobre os pads pode puxá-los completamente e inutilizar o trackpad. É melhor cobrir a conexão com cola quente depois de soldá-la.
Etapa 4:instalando algumas bibliotecas
Para este projeto, precisaremos instalar duas bibliotecas no Arduino IDE, estas bibliotecas são:
- Biblioteca do mouse:aqui
- Biblioteca PS / 2:aqui
Baixe-os, abra seu arquivo de biblioteca do IDE do Arduino e solte-os. A biblioteca PS / 2 é usada para obter os dados do trackpad e a biblioteca do Mouse nos permite pegar esses dados e transformá-los em comandos de mouse que o computador pode ler. a porta USB.
Etapa 5:o código
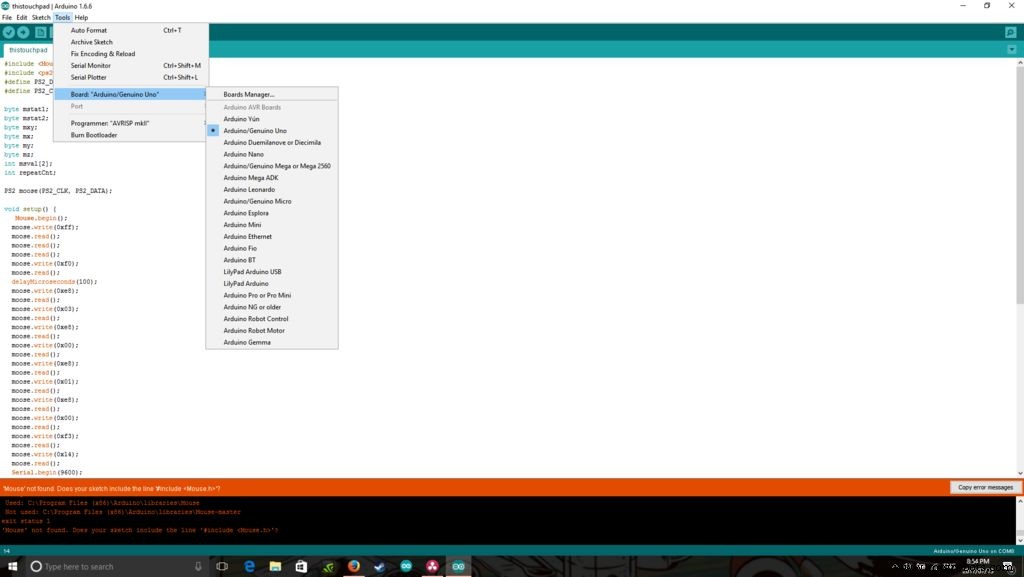
Agora que temos as bibliotecas instaladas, podemos fazer o upload do nosso código para o Arduino, o código pode ser encontrado abaixo, no entanto, devo observar que o código não será carregado ou compilado a menos que a placa selecionada em ferramentas seja o Arduino micro ou Leonardo, portanto, mantenha isso em lembre-se se você obtiver um erro ao compilar o código. Depois de fazer o upload do código, o Arduino deve reiniciar como um dispositivo HID e aparecer no computador como um mouse.
thistouchpad.ino
Etapa 6:Concluir e solucionar problemas
Então, agora, quando você toca o touchpad, você deve obter algum movimento na tela e, como o Arduino está atuando como um dispositivo USB, você pode conectá-lo a qualquer computador e ele irá inicializar instantaneamente como um mouse USB, independentemente do sistema operacional ou tipo de computador . Agora, se você não quiser passar pelo processo de programação e fiação do Arduino, você poderia apenas comprar um conversor PS / 2 para USB, mas eu não recomendaria isso, pois li que isso bagunça os dados vindos de o trackpad e pode torná-lo inutilizável e, ao usar um Arduino, podemos personalizar completamente tudo sobre o mouse de acordo com nossa preferência, como a velocidade do mouse e quais ações como toque duplo e rolagem fazem, informações sobre como você pode personalizar completamente o seu podem ser encontradas na página do mouse do Arduino aqui.
Se o seu trackpad não estiver enviando dados de volta, pode ser uma solução fácil, dê uma olhada na parte de trás do trackpad e tente localizar um número de peça, você pode pesquisar esse número de peça no Google com a palavra pinagem e ele deve mostrar onde estão os dados , relógio e pinos de 5 volts são.
Muito obrigado por ler, como sempre, se você tiver alguma dúvida, deixe nos comentários e eu tentarei o meu melhor para entrar em contato com você.
Código
- Código
Código Arduino
colar no arduino ide#include#include #define PS2_DATA 10 # define PS2_CLK 9byte mstat1; byte mstat2; byte mxy; byte mx; byte meu; byte mz; int msval [2]; int repeatCnt; PS2 alce (PS2_CLK, PS2_DATA); void setup () {Mouse.begin (); moose.write (0xff); moose.read (); moose.read (); moose.read (); moose.write (0xf0); moose.read (); atrasoMicrosegundos (100); moose.write (0xe8); moose.read (); moose.write (0x03); moose.read (); moose.write (0xe8); moose.read (); moose.write (0x00); moose.read (); moose.write (0xe8); moose.read (); moose.write (0x01); moose.read (); moose.write (0xe8); moose.read (); moose.write (0x00); moose.read (); moose.write (0xf3); moose.read (); moose.write (0x14); moose.read (); Serial.begin (9600);} void ms_read () {moose.write (0xeb); moose.read (); mstat1 =moose.read (); mxy =moose.read (); mz =moose.read (); mstat2 =moose.read (); mx =moose.read (); my =moose.read (); msval [0] =(((mstat2 &0x10) <<8) | ((mxy &0x0F) <<8) | mx); msval [1] =(((mstat2 &0x20) <<7) | ((mxy &0xF0) <<4) | my); msval [2] =int (mz);} void loop () {ms_read (); if (msval [0]> 0 e msval [2]> 10) {repeatCnt ++; } else {repeatCnt =0; } if (repeatCnt> 2) {msval [0] =map (msval [0], 580, 5164, -1023, 1023); msval [1] =mapa (msval [1], 1120, 5967, 1023, -1023); Mouse.move (msval [0] / 200, msval [1] / 200); }}
Processo de manufatura
- Robô Raspberry Pi controlado por Bluetooth
- Luz da mesa interativa controlada por gestos
- Brinquedo controlado pelo Android usando Raspberry Motor Shield
- LEDs controlados por Alexa através do Raspberry Pi
- Carro RC controlado por joystick
- Braço robótico controlado por Nunchuk (com Arduino)
- Robô controlado por fala
- MobBob:DIY Arduino Robot Controlado por Smartphone Android
- Dispositivos Bluetooth controlados por voz com OK Google
- Robô de piano controlado por Arduino:PiBot