


Como programar um transportador de robô sem enlouquecer
Programar um transportador robótico é mais complicado do que muitas pessoas imaginam. Uma boa simulação é a chave para o sucesso, mas como fazer isso sem enlouquecer?
As esteiras transportadoras são uma maneira fácil de mover produtos para o seu robô, certo?
Bem, na verdade não. Muitas vezes pensamos em transportadores como uma solução simples, mas, na verdade, eles são um dos métodos mais complicados de entrega de peças. Eles exigem que o robô detecte e rastreie objetos em movimento no transportador. Eles precisam ser controlados através do programa do robô. Eles também sofrem de vários problemas mecânicos ao longo da vida, como rastreamento ruim, desgaste da correia e deslizamento. Tudo isso significa que os transportadores podem deixá-lo um pouco louco.
Em vez de serem simples, eles podem ser complicados de usar.
Não podemos resolver os problemas mecânicos de seus transportadores - para isso, você precisa de um bom cronograma de manutenção, como o mostrado nesta lista de verificação útil da Cisco-Eagle. No entanto, podemos ajudá-lo a simular o transportador facilmente para que você possa testá-lo e integrá-lo à programação do seu robô.
Veja como programar seu transportador robótico sem enlouquecer.
As 5 partes móveis complicadas de um transportador de robô
Primeiro, é importante entender por que programar um transportador é um desafio.
Existem 5 “partes móveis” que dificultam a integração da programação do robô com os transportadores.
1. Controle do próprio transportador
Pode parecer que o controle do transportador é apenas um negócio “ligado/desligado”, mas geralmente é um pouco mais complexo do que isso. Os transportadores têm uma variedade de opções de controle, dependendo do modelo. Alguns têm uma velocidade fixa, enquanto outros podem ser controlados com velocidades variáveis. Alguns têm um modo reverso, frenagem ativa ou comutação rápida. Depois, existem diferentes métodos de controle, sendo os três mais comuns o controle de pulso, o controle de velocidade e o controle distribuído.

Você pode ter que controlar o transportador dentro do próprio programa do robô. Caso contrário, pode ser necessário fazer interface com o transportador por meio de uma rede. Ambas as opções adicionam complexidade de programação.
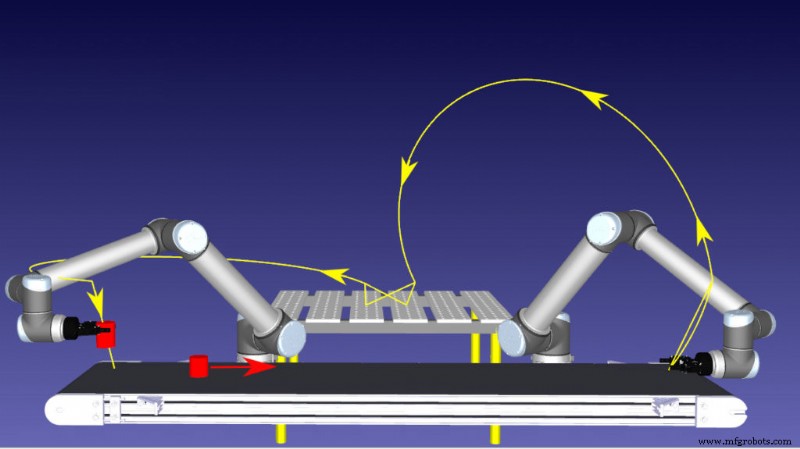
2. Rastreamento e detecção de objetos
Para pegar objetos de um transportador em movimento, o robô deve ser capaz de localizá-los de forma confiável. Isso significa que você precisa de algum tipo de sensor para detectar quando um objeto chega na frente do robô. Além disso, o robô pode precisar de alguma maneira de rastrear os objetos à medida que o transportador se move.
Os sensores mais comuns para isso são sensores de visão (por exemplo, câmeras 2D ou 3D) e sensores de detecção de peças (por exemplo, feixes de luz, sensores magnéticos, sensores indutivos, etc). Alguns são mais simples de integrar do que outros, mas todos adicionam complexidade extra ao seu programa.
3. Manipulando objetos em movimento
Um alvo em movimento é sempre mais difícil de manusear do que um estático. Isso introduz complexidade ao agarrar de uma correia transportadora. O robô deve ser capaz de se mover para a posição, agarrar o objeto com firmeza e se afastar enquanto novos objetos continuam chegando.
A velocidade do transportador deve ser ajustada com precisão à velocidade do robô, caso contrário, os objetos podem ser perdidos. Se você já viu a famosa “cena do chocolate” da comédia dos anos 1950 I Love Lucy, você sabe o que quero dizer (e aqui está, se você ainda não viu).
4. Escolha do efetor final
O braço do robô não é a única parte do sistema que precisa manter a velocidade. O efetor final pode ter um efeito significativo no tempo de ciclo e, portanto, na velocidade do transportador. Alguns tipos de efetores finais são mais rápidos que outros.
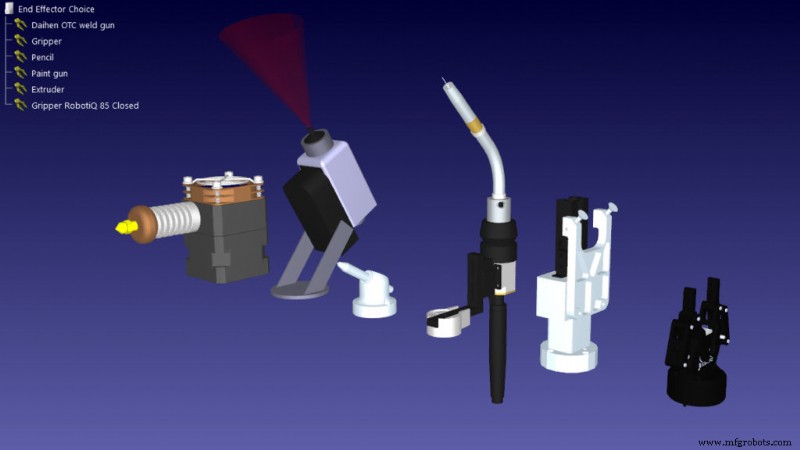
Isso significa que agora temos que controlar e coordenar 3 velocidades independentes simultaneamente:a velocidade do transportador, a velocidade do braço do robô e a velocidade de preensão do efetor final.
5. Uso de acessórios
A parte móvel final não é, na verdade, uma parte móvel. As luminárias são peças mecânicas estáticas que são fixadas ao transportador para mover os objetos para a posição. Eles são uma maneira confiável de ordenar os objetos no transportador sem usar sensores.
Por exemplo, você pode usar um acessório como alternativa ao uso de um sensor de visão. Com chapas de metal especialmente formadas, você pode afunilar objetos em uma fila estática, permitindo que o robô os pegue sem sensores extras. Eles simplificam a programação, mas aumentam a complexidade do projeto mecânico.
Como simular um transportador com RoboDK
Você pode superar os cinco desafios acima simulando seu sistema robótico e testando-o completamente antes de usar o sistema físico. Isso nem sempre é fácil com simuladores de robôs, muitos dos quais não possuem um recurso simples para adicionar transportadores.
Felizmente, os transportadores são bastante simples no RoboDK. Existem até duas opções para adicioná-los, dependendo de quanto controle você precisa.
Os dois tipos de transportador no RoboDK são:
Opção 1:programação em Python
O método mais flexível de criar um transportador no RoboDK é programá-lo em Python. Você pode ver isso em ação no vídeo de exemplo Simulação de transportador com RoboDK.
As vantagens da programação python são:
- É muito flexível. O movimento do transportador é limitado apenas pela sua habilidade de programação. Você pode programar o transportador simulado para corresponder às propriedades da sua correia real.
- É totalmente personalizável. Você pode programar o transportador para se mover da maneira que desejar. Você tem controle total sobre seus movimentos e como ele lida com objetos.
- Permite transportadores mais complexos. Se o seu transportador tiver modos de controle avançados, eles podem ser incluídos no código python. Além disso, se você colocou um acessório para mover objetos para o lado do cinto, por exemplo, isso pode ser programado no código.
As desvantagens da programação python são:
- Requer habilidade de programação . Você tem que ser capaz de programar em python. Esta é uma das linguagens mais fáceis de aprender, mas ainda requer uma curva de aprendizado se você tiver usado apenas a interface gráfica do RoboDK até agora.
- Demora um pouco mais . Comparado com a opção de mecanismo linear, a programação python leva tempo. Além disso, quanto mais complexo for o transportador, mais tempo levará para programar.
Opção 2:mecanismo linear
A outra opção é criar um mecanismo linear usando o assistente “Model Mechanism”. Isso permite que você crie um transportador simples com um único eixo linear.
As vantagens do mecanismo linear são:
- É rápido. Você pode criar um mecanismo linear em questão de minutos e adicionar o transportador à sua simulação de robô muito rapidamente.
- Ele usa o assistente gráfico. Você pode criar o mecanismo usando o assistente usando apenas quadros de referência e destinos.
- Requer pouca ou nenhuma programação. Você não precisa fazer nenhuma programação python para criar o transportador. No entanto, esteja ciente de que você provavelmente terá que fazer alguma programação para detectar objetos no transportador.
As desvantagens do mecanismo linear são:
- É limitado. A natureza simples do mecanismo significa que você só pode modelar um transportador de eixo único.
- É inflexível. Essa opção dificulta a modelagem das opções de controle mais avançadas do seu transportador. Também torna difícil detectar quando objetos caem do transportador.
Como começar
Qual opção você escolhe depende muito de quanto você deseja evitar a programação python. A menos que você tenha um bom motivo para escolher o mecanismo linear, geralmente recomendamos escolher a opção python. É muito mais flexível e — acho (apesar de ser programador) — mais fácil de entender e implementar.
Qualquer que seja a opção escolhida, você não precisa criar a simulação do transportador do zero.
Temos ambas as opções disponíveis para download em nossa Biblioteca de Robôs. Basta escolher “Objeto” no menu “Tipo” e você verá as duas opções:“Modelo Python” para a opção python; e “Model Mechanism” para a opção de mecanismo linear.
Se você ficar preso, você sempre pode postar um comentário no Fórum RoboDK e faremos o nosso melhor para ajudá-lo.
Como Hollywood faz adereços impressionantes com o Robot Milling
6 coisas incríveis que você pode fazer com o Rhino e o RoboDK
Robô industrial
- Como robôs de pulverização melhoram a consistência
- Como os robôs de pintura reduzem o retrabalho
- Como um robô alcança total autonomia?
- Crazy Conveyors
- Whitepaper:Como Encontrar o Potencial do Seu Robô
- Guia definitivo:como escolher um robô SCARA correto
- Robot Machine Tending:O que é e como funciona
- Como reduzir o tempo de treinamento para soldagem de robôs
- A maneira correta de simular um transportador de robô
- Como escolher a estrutura do transportador