


Os 11 conceitos básicos de programação de robôs mais úteis
Quais propriedades básicas são mais úteis para saber quando você está começando com a programação de robôs?
Se você é novo no mundo da robótica ou está apenas procurando melhorar suas habilidades de programação, aqui estão as principais noções básicas de programação de robôs que é bom saber.
Às vezes, pode parecer que você precisa de um diploma em robótica para começar a programar robôs. As abordagens convencionais para programação de robôs industriais parecem difíceis de entender para novos programadores de robótica.
No entanto, com um bom conhecimento básico de robótica e um bom software de programação de robôs, você pode começar com facilidade e rapidez.
Aqui estão os 11 conceitos básicos de programação de robôs mais úteis:
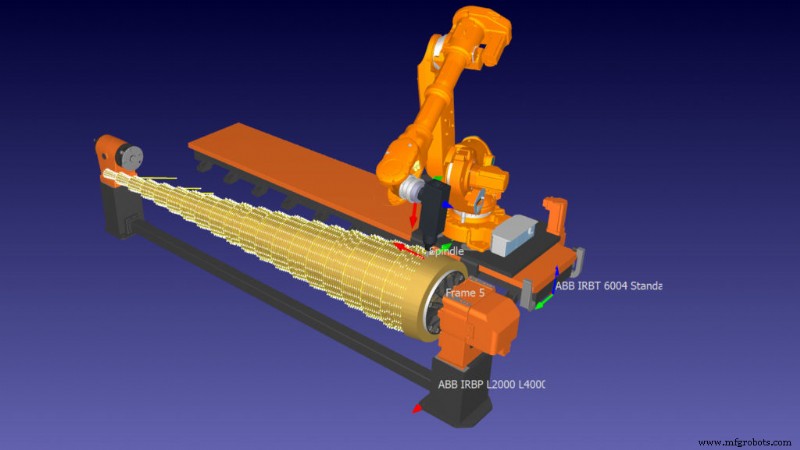
1. Partes básicas de um robô
Antes de começar a aprender a programar um robô, é útil entender as partes básicas de qualquer robô industrial. Dessa forma, você está pelo menos confortável com a máquina física que estará programando.
Por exemplo, as partes mais básicas de um robô industrial de 6 DoF são:
- Braço do manipulador
- Efetor final
- Controlador
- Fonte de energia
- Sensores (se houver)
Os componentes variam um pouco dependendo do tipo de robô.
2. Graus de liberdade
Já apresentei um conceito vital na robótica:Graus de Liberdade (DoF).
A DoF de um robô especifica com quantos eixos independentes o robô pode se mover. Por exemplo, um braço manipulador de 6 DoF terá 6 eixos controláveis independentemente. Alguns DoF são “revolutos” (ou seja, eles giram em torno de um ponto) e alguns são “lineares” (ou seja, eles se movem ao longo de uma linha). É útil se familiarizar com o DoF de qualquer robô antes de programá-lo.
3. Juntas e Efetores Finais
O “fim do negócio” de um robô (ou seja, a parte que opera na tarefa) é conhecido como o “efetor final”. Quando você está programando, geralmente você está mais interessado em direcionar o efetor final do robô para locais específicos.
Para mover o robô, é necessário enviar instruções com as posições desejadas de cada um dos DoF do robô. Se você estiver usando um software como o RoboDK, você pode simplesmente programar a posição final desejada do efetor diretamente em vez de enviar posições específicas da junta.
4. Pose:Posição e Orientação
Como você programa o efetor final para dizer aonde ir?
A posição e orientação do efetor final do robô (ou qualquer outro local que você programar) são combinadas para formar a “pose”. Você precisa especificar a pose de qualquer local para o qual o robô se moverá em seu programa. O método mais comum de especificar uma pose na programação é através dos Ângulos de Euler.
Para obter mais informações, consulte nosso artigo Robot Euler Angles:The Essential Primer.
5. Ponto central da ferramenta (TCP)
Como estamos mais interessados na pose do efetor final quando estamos programando um robô, geralmente usamos o termo Tool Center Point para nos referirmos ao centro operacional da ferramenta.
Aqui estão alguns exemplos para diferentes efetores finais:
- Pistola de cola — Você pode definir o TCP para estar na ponta da arma.
- Pinça — O TCP pode estar no centro dos dedos da garra.
- Pistola de solda — O TCP pode estar a alguns milímetros da ponta da arma, onde a chama é mais quente.
Como programador, você escolhe onde faz mais sentido colocar o TCP do robô.
6. Cinemática
Um dos aspectos mais desafiadores da robótica é a cinemática. Isso significa apenas o arranjo geométrico do robô. A cinemática é representada como uma equação ou algoritmo bastante grande.
A equação Forward Kinematic responde à pergunta “Se eu definir as articulações do robô para uma determinada posição, onde o TCP terminará?”
O algoritmo Inverse Kinematic responde à pergunta oposta “Se eu quiser que o TCP termine nesta pose, em que posição eu preciso definir as juntas?”
Com um bom software de programação de robôs, você provavelmente não precisa formular sua própria cinemática, mas pode ser útil entender o conceito básico.
7. Limites conjuntos
As equações cinemáticas descrevem o robô usando pura geometria e matemática. No entanto, os robôs são máquinas físicas. O robô físico muitas vezes não pode alcançar todas as posições que a geometria diz que pode.
Introduzimos limites de juntas na programação para limitar o movimento das juntas do robô apenas para posições fisicamente possíveis. Eles apenas dizem ao programa “Esta articulação não pode se mover além desse certo ângulo.”
8. Tipos de movimentação
Quando você está programando o robô, existem diferentes tipos de movimento que você pode fazer o robô fazer.
Os 3 movimentos básicos são:
- Movimento Conjunto — Este é um movimento rápido e áspero, onde cada articulação tenta chegar à sua posição alvo o mais rápido possível. Para evitar colisões, os movimentos das articulações só devem ser programados quando o robô estiver se movendo em espaço livre.
- Movimento linear — Este é um movimento controlado ao longo de uma linha entre duas poses. O robô necessariamente se moverá mais devagar com um movimento linear, mas também não apresentará colisões inúteis.
- Movimento circular — Como um movimento linear, o robô se move em uma linha controlada, desta vez ao longo de um caminho circular.
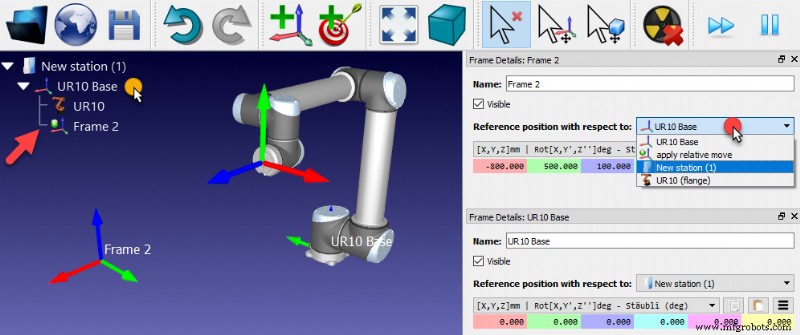
9. Simulação e programação offline
Existem muitas maneiras diferentes de programar um robô, incluindo “sujar as mãos” com a linguagem de programação (geralmente complexa) fornecida pelo fabricante do robô.
A simulação e a programação offline oferecem um método de programação mais fácil. Em vez de programar o robô físico diretamente, você programa um modelo simulado do robô usando comandos intuitivos. O software então converte o programa em código que o robô físico pode entender.
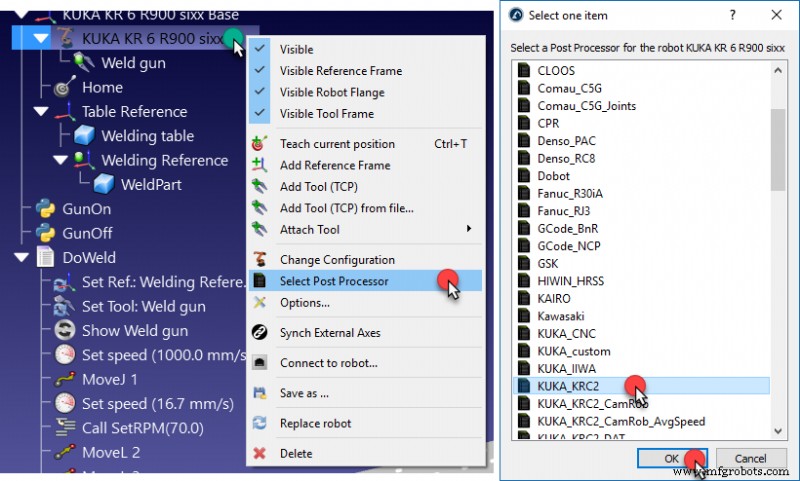
10. Pós-processadores
A parte de um software de programação offline que converte o programa do robô é conhecida como pós-processador. O software de programação terá um pós-processador diferente para cada fabricante de robô, às vezes mais de um.
Você pode descobrir mais sobre pós-processadores em nosso artigo Robot Post-Processors:Everything You Need to Know.
11. Depuração
Qualquer que seja o método de programação que você esteja usando, uma habilidade básica vital é a depuração. Você deve sempre depurar seu programa para ter certeza de que ele está funcionando como você pretende antes de configurar seu robô rodando em um ambiente de produção.
A programação offline fornece uma etapa extra de depuração porque você programa um modelo simulado do robô antes de baixar o programa para o próprio robô físico, o que reduz a possibilidade de erros.
Se você quiser começar a programar robôs imediatamente, você pode baixar uma avaliação gratuita do RoboDK aqui.
Em quais aspectos básicos da programação de robôs você gostaria de ajuda? Conte-nos nos comentários abaixo ou participe da discussão no LinkedIn, Twitter, Facebook, Instagram ou no RoboDK Forum.
5 maneiras especializadas de programar um robô FANUC
Como começar com a programação de robôs Yaskawa
Robô industrial
- Os benefícios do monitoramento remoto, programação remota e manutenção preditiva
- Robôs Articulados:Guia para o Robô Industrial Mais Familiar
- Robôs cartesianos:Guia para a tecnologia de robô mais escalonável
- Robôs SCARA:Guia para o robô mais versátil e procurado
- Comentário:entendendo os métodos de programação de robôs
- O que é filamento de TPU? O Guia Básico e Útil.
- Quando é o momento certo para investir em ferramentas de programação de robôs?
- Programação de robôs industriais para iniciantes
- Escolhendo o software certo para seleção de robôs
- Robô de revestimento Fanuc:o P-250iA