


Como decidir qual robô é melhor com a visualização do espaço de trabalho
Como você pode saber se um robô atenderá às necessidades de espaço de sua tarefa antes de comprá-lo?
Mesmo depois de restringir sua seleção por todas as especificações e métricas usuais, você ainda pode ter algumas dúvidas incômodas.
O robô será tão grande que não cabe no espaço que você tem disponível para ele?
Se você usar um robô menor, ele poderá alcançar todas as áreas necessárias para a tarefa?
Existe uma maneira de otimizar o tamanho do robô para ser mais eficiente?
Antes de comprar um robô específico, é difícil dizer como será tê-lo em suas instalações ao seu lado. Você pode assistir a todos os vídeos do YouTube que quiser, ler todas as fichas técnicas e até mesmo ver outros robôs nas instalações de outras pessoas…
Sem ver como o robô se encaixará em sua tarefa específica, às vezes pode acabar como um jogo de adivinhação. Você faz o máximo de cálculos que puder, então é só esperar.
Ou você opta por ser excessivamente conservador e ceder grandes quantidades de espaço para um robô que não precisa dele.
Talvez você já tenha lido nosso Guia para Escolher um Robô para Fabricação.
Você identificou que tipo de robô você precisa, qual finalizador e quais acessórios. Você reduziu suas opções a uma seleção de robôs com base em sua carga útil e repetibilidade. E você usou nossas ferramentas para selecionar um alcance que parece mais ou menos razoável.
Mas você ainda não consegue visualizar todo o espaço que cada robô irá ocupar.
Por que é difícil imaginar o espaço que um robô vai ocupar
O problema com os robôs é que eles são muito dinâmicos.
Com uma máquina CNC, por exemplo, você pode caminhar até uma máquina em uma feira e ver exatamente quanto espaço ela ocupará em sua área de trabalho. O tamanho total da máquina é simples de calcular – é basicamente um grande paralelepípedo.
Com um robô, o espaço que ele ocupa não é tão simples. Além das dimensões físicas do próprio robô, ele também ocupa um espaço estendido contendo todos os locais que o efetor final do robô alcançará quando o robô estiver em movimento. Isso é conhecido como o “espaço de trabalho” do robô.
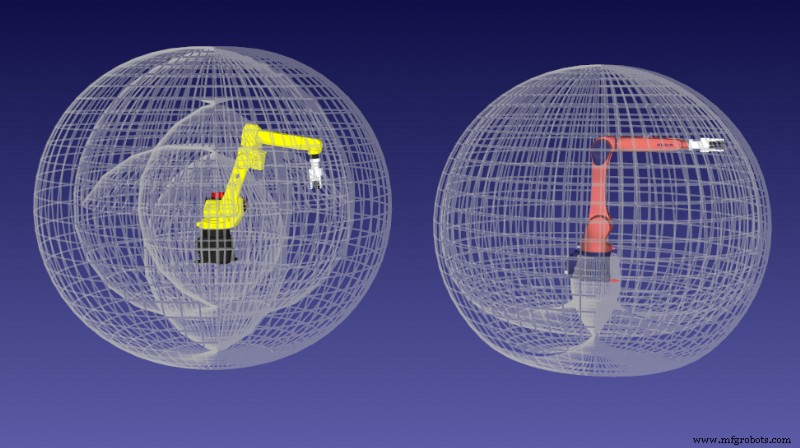
A maioria dos robôs industriais de 6 DoF tem um espaço de trabalho que é um pouco como uma esfera. Os robôs delta têm um espaço de trabalho complexo que se parece com um arco tridimensional. Os robôs SCARA têm um espaço de trabalho cilíndrico.
É difícil dizer apenas olhando para um robô como será seu espaço de trabalho.

Como você pode garantir que o robô que você está considerando terá um espaço de trabalho adequado às suas necessidades?
A visualização do espaço de trabalho ajuda você a tomar uma decisão melhor
Felizmente, existe uma maneira de ver facilmente o espaço de trabalho do robô e descobrir como isso afetará sua tarefa específica.
E você pode fazer isso antes mesmo de escolher qual robô deseja comprar.
A visualização do espaço de trabalho é uma ferramenta que permite visualizar os limites externos do espaço de trabalho de um robô como uma forma 3D. No RoboDK, este espaço é mostrado como um contorno cinza que é colocado ao redor do modelo simulado do robô.
Você pode usar esse recurso para informar sua decisão sobre qual robô é o melhor para sua tarefa.
Ao criar uma maquete virtual de seu aplicativo, você pode alternar rapidamente entre diferentes modelos de robôs (sem ter que programar a tarefa em si) e usar o recurso de visualização do espaço de trabalho para ver se cada robô específico será o melhor para atender às suas necessidades.
Depois de encontrar um robô que se encaixe na tarefa - com base em seu espaço de trabalho - você pode programar o aplicativo no simulador para garantir que o robô escolhido realmente seja capaz de fazer o trabalho.
Como funciona a visualização do espaço de trabalho
Quando você olha para a folha de dados de um robô, normalmente verá uma representação pictórica básica do espaço de trabalho desse robô. Normalmente, isso consiste em uma visão lateral e outra na parte superior do robô.
Essas imagens são úteis, mas não o suficiente.
Uma visualização do espaço de trabalho é basicamente uma versão 3D dessas imagens. Ele é produzido movendo algoritmicamente todas as articulações do robô através de todas as posições possíveis e mapeando a posição resultante do efetor final em uma forma 3D.
Como o cálculo é feito em 3D, ele oferece uma perspectiva muito mais holística sobre os recursos de um robô específico do que você teria se apenas analisasse a folha de dados do robô.
O impacto de adicionar um agente final
As alterações feitas no robô às vezes também afetarão seu espaço de trabalho. Por exemplo, quando você adiciona um efetuador final, as dimensões desse efetuador final alteram o tamanho e, às vezes, também a forma da área de trabalho. No RoboDK, você pode optar por ver a área de trabalho do robô com e sem seu efetor final.
Sempre que você adiciona um efetor final ao seu robô, é uma boa prática usar o recurso de visualização da área de trabalho para ver como isso afetará a área de trabalho do robô.
Como começar a usar a visualização do espaço de trabalho
Com o RoboDK, é muito fácil usar a visualização do espaço de trabalho para ajudá-lo em suas decisões de compra de robôs.
Aqui estão as etapas para visualizar o espaço de trabalho de qualquer robô em particular:
- Carregue o modelo do robô no RoboDK a partir de nossa extensa Biblioteca de robôs.
- Abra o painel de propriedades do robô clicando com o botão direito do mouse na árvore do programa.
- Vá para a seção intitulada WorkSpace e opte por visualizar a área de trabalho do próprio robô (a partir de seu flange) ou com a ferramenta atual anexada.
- Agora você verá o espaço de trabalho do robô visualizado ao redor do próprio robô.
Claro, você não está restrito a apenas visualizar o espaço de trabalho de um robô por vez. Você pode carregar vários robôs na simulação e comparar seus espaços de trabalho lado a lado.
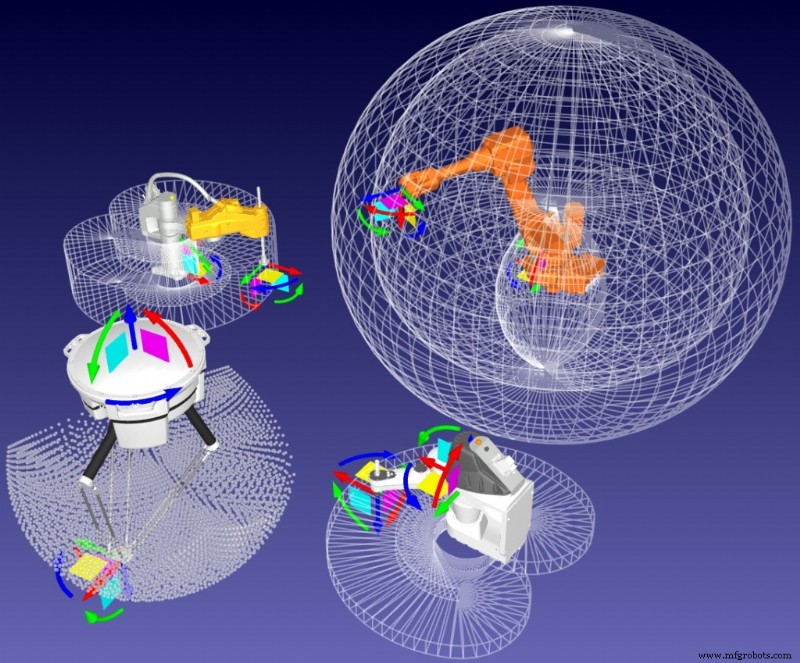
Isso pode ser útil quando você está tentando decidir entre dois modelos de robô diferentes. Mas também pode ser útil quando você está usando vários robôs em uma única tarefa e deseja descobrir como seus espaços de trabalho podem interagir e se sobrepor.
Como a visualização do espaço de trabalho pode ajudar na implantação do seu robô? Conte-nos nos comentários abaixo ou participe da discussão no LinkedIn, Twitter, Facebook, Instagram ou no RoboDK Forum.
Cinemática inversa em robótica:o que você precisa saber
5 maneiras comprovadas que a indústria de plásticos pode usar robôs
Robô industrial
- Quais robôs de pintura industrial funcionam melhor?
- Os 10 melhores fabricantes de robôs SCARA
- Como decidir qual empresa de engenharia é a certa para você
- Treinamento de Robô Gratuito com RoboDK
- Robot Drilling 101:Como implantar um Robot Drilling System
- Como Hollywood faz adereços impressionantes com o Robot Milling
- 10 truques para alcançar os melhores resultados com soldagem robótica
- Como convencer a gerência a concordar com a usinagem de robôs
- Como começar com a programação de robôs Yaskawa
- Calibração do robô:quais peças precisam ser calibradas?