


Controle de motor de passo 28BYJ-48 com joystick
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Sobre este projeto
Hardware necessário:
- placa Arduino UNO
- motor de passo 28BYJ-48 (com placa de driver ULN2003A)
- Joystick
- fonte de alimentação de 5 V
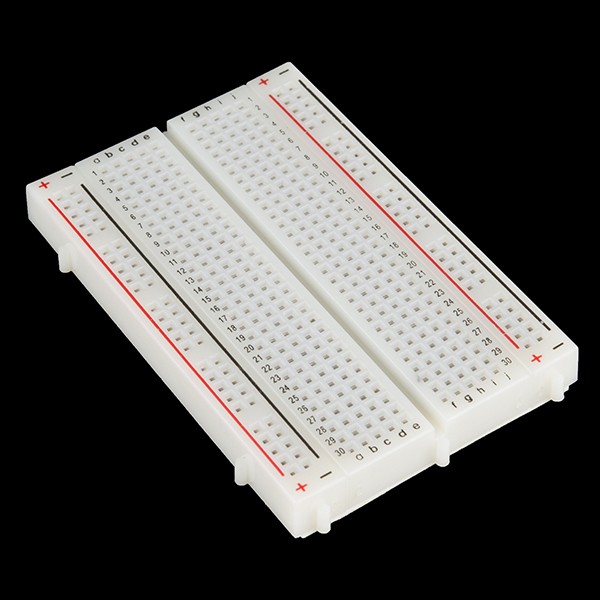
- tábua de pão
- Jumper fios
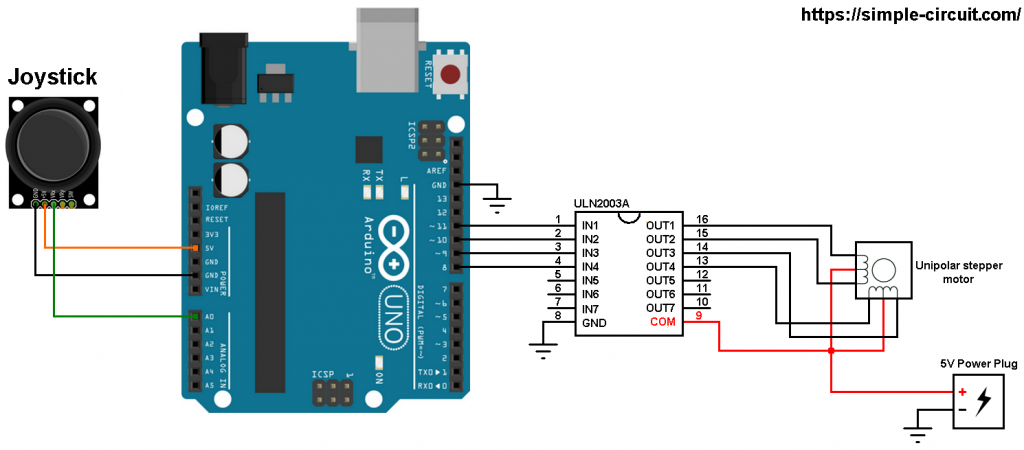
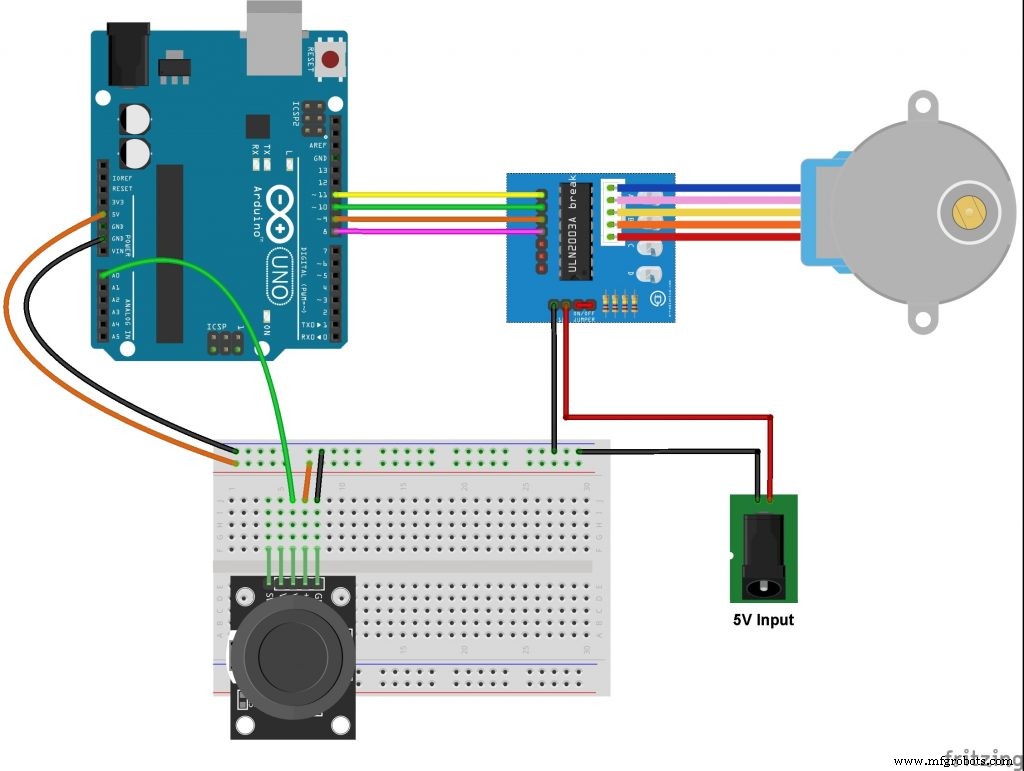
Controle de motor de passo com Arduino e circuito de joystick:O diagrama esquemático do circuito do projeto é mostrado abaixo (todos os terminais aterrados são conectados juntos).
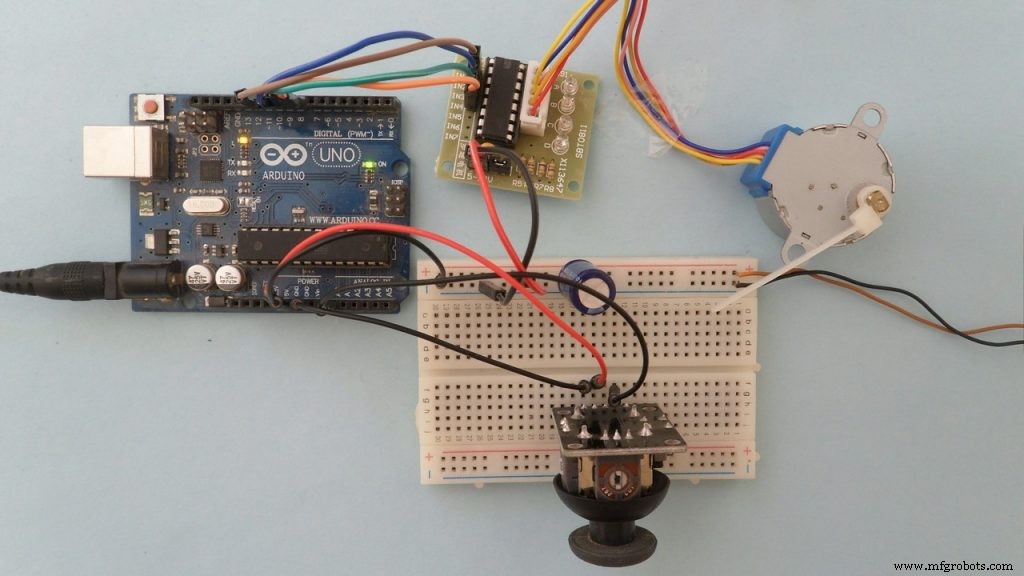
e a imagem a seguir mostra o circuito de congelamento:
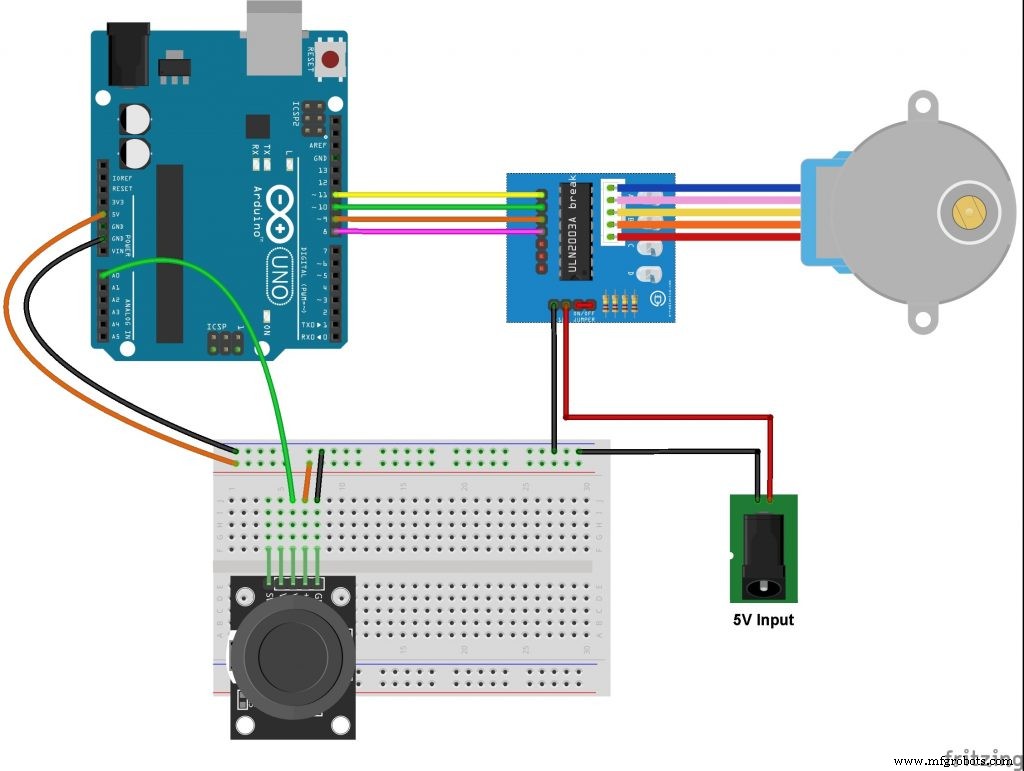
O motor de passo é conectado à placa ULN2003A que é fornecida com fonte de alimentação externa de 5V. As linhas de controle (IN1, IN2, IN3 e IN4) desta placa são conectadas ao Arduino da seguinte forma:IN1 para Arduino pino 11IN2 para Arduino pino 10IN3 para Arduino pino 9IN4 para Arduino pino 8
A placa do joystick tem 5 pinos:GND, + 5V, VRX, VRY e SW onde:GND e + 5V são os pinos da fonte de alimentação VRX é a saída do potenciômetro do eixo XVRY é a saída do potenciômetro do eixo YSW é o terminal do botão de pressão (o outro terminal está conectado ao GND). A saída do potenciômetro do eixo X (VRX) é conectada ao pino analógico A0 do Arduino, a saída do potenciômetro do eixo Y (VRY) também pode ser usada. O pino da chave (SW) não é usado neste exemplo. Usando os potenciômetros do eixo X e do eixo Y, podemos controlar dois motores de passo independentemente.
"Então pessoal se você curtir o projeto, então não se esqueça de seguir e curtir "
Código
- CÓDIGO:
CÓDIGO: C / C ++
por favor, certifique-se de adicionar todas as bibliotecas ou seja incluem neste código// este projecto é feita por BEASTIDREES62 https://id.arduino.cc/?code=MTxqeHweG6vL2cur&state=amxEcTB2bnNiYjluTUxmRExWaWZnOXIzUk1BLWRqZTZYUGtJNGtxODB%2Bdg%3D%3D // incluem Arduino biblioteca de motor de passo # include// define o número de passos por revolução # define STEPS 32 // define os pinos de controle do motor de passo # define IN1 11 # define IN2 10 # define IN3 9 # define IN4 8 // inicializa a biblioteca stepperStepper passo a passo (STEPS, IN4, IN2, IN3, IN1); // a saída do potenciômetro do joystick está conectada ao Arduino A0 # define o joystick A0 void setup () {} void loop () {// lê o valor analógico do potenciômetro int val =analogRead (joystick); // se o joystic estiver no meio ===> pare o motor if ((val> 500) &&(val <523)) {digitalWrite (IN1, LOW); digitalWrite (IN2, LOW); digitalWrite (IN3, LOW); digitalWrite (IN4, LOW); } else {// move o motor na primeira direção while (val> =523) {// mapeia a velocidade entre 5 e 500 rpm int speed_ =map (val, 523, 1023, 5, 500); // define a velocidade do motor stepper.setSpeed (speed_); // move o motor (1 passo) stepper.step (1); val =analogRead (joystick); } // move o motor na outra direção enquanto (val <=500) {// mapeia a velocidade entre 5 e 500 rpm int speed_ =map (val, 500, 0, 5, 500); // define a velocidade do motor stepper.setSpeed (speed_); // move o motor (1 passo) stepper.step (-1); val =analogRead (joystick); }}}
Esquemas
Processo de manufatura
- Circuitos de controle do motor
- Motores de passo
- Suavizando o desempenho do trem de força EV com um algoritmo de controle orientado para o campo
- Controle de acesso com QR, RFID e verificação de temperatura
- Torre Sentinela Nerf Autônoma
- Aceitar moeda de controle com Arduino
- Biblioteca de motor de passo bipolar
- Obstáculos para evitar o robô com servo motor
- Swiper - Auto Tinder / Bumble Swiper
- Torno com CNC