


Carro-robô controlado por Bolt
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Aplicativos e serviços online
 |
| |||
 |
|
Sobre este projeto
Isenção de responsabilidade:
Nenhum aparelho eletrônico foi danificado durante a realização deste projeto.
Primeiro ato:um belo dia ...
Estávamos trabalhando desde a manhã e tínhamos muita documentação e testes de código restantes em nossas mãos e precisávamos desesperadamente de uma pausa, mas jogar pebolim não era o ideal, pois nos expulsaria da zona. Então, para manter a compostura, começamos a pensar no que poderíamos fazer que nos relaxasse, mas ainda nos manteria naquela "zona de trabalho". Foi quando nosso gerente sugeriu "Por que você não faz um pequeno projeto e coloca no Hackster?". Bem, bom chamar Pranav.
Portanto, decidimos fazer um robô RC controlado pela Internet com um pequeno recurso de bônus (que revelaremos mais tarde porque o suspense é importante).

Tudo bem, então estávamos animados e corremos para a loja de ferragens interna.
Ato dois:a floresta do hardware
Chegamos na loja de ferragens, ela está cheia de kits e componentes que fazem seus olhos brilharem de ganância, suas mãos serão puxadas em direção a eles e antes que você perceba você estará soldando peças para fazer uma Calculadora de 8 bits, mas estávamos focados e não deixamos essas distrações nos obrigar e nós apenas pegamos o que precisávamos (você também deveria)
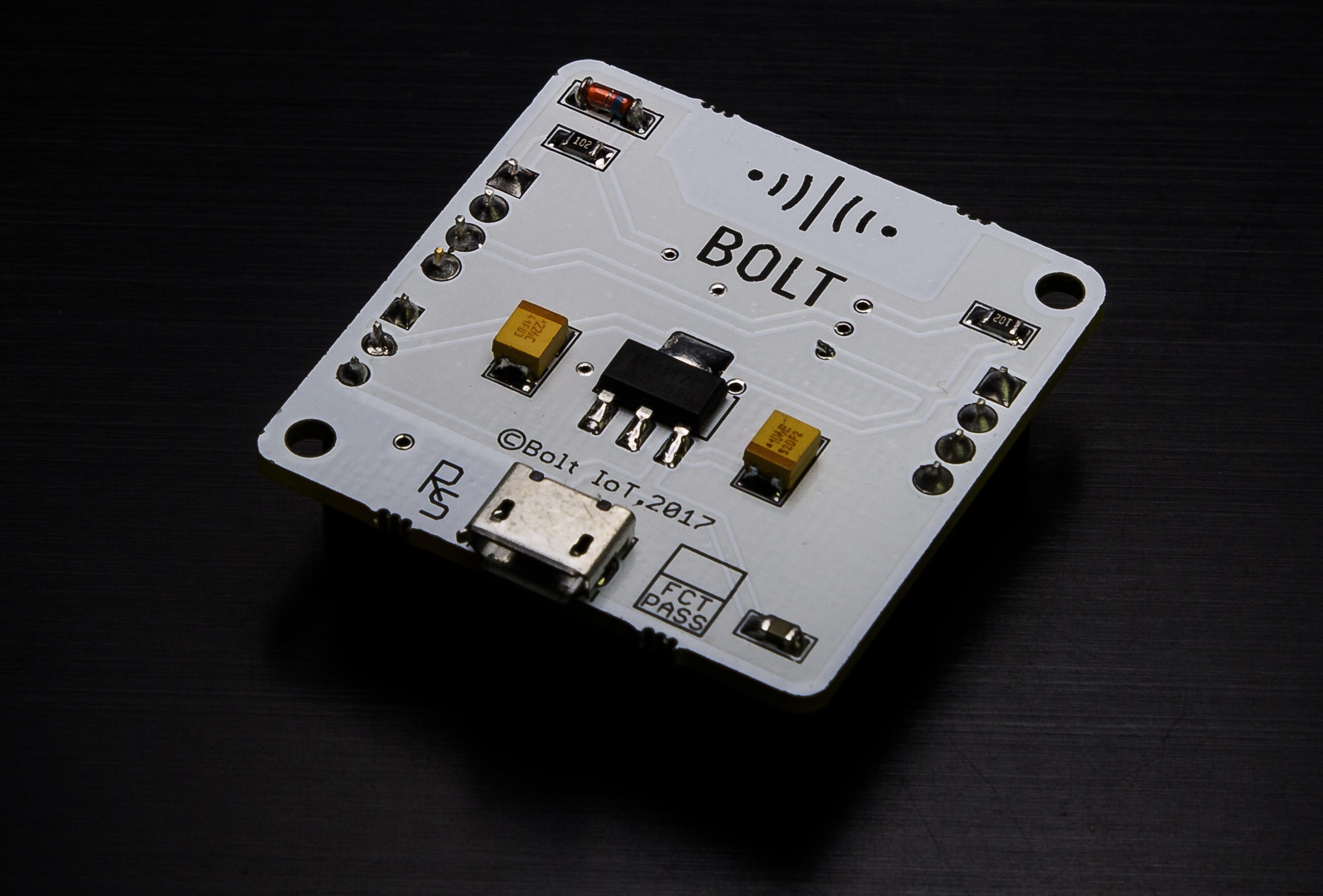
1. Módulo Wifi Bolt

2. Kit Robótico Básico

3. Arduino UNO ou Boltduino


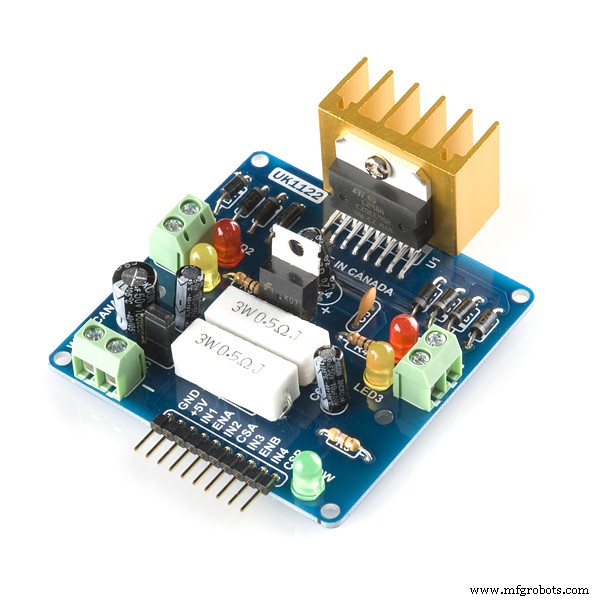
4. Blindagem do driver do motor L298N

5. Sensor de proximidade

6. Fios de ligação

7. Adaptador de energia

Terceiro ato:Forjar
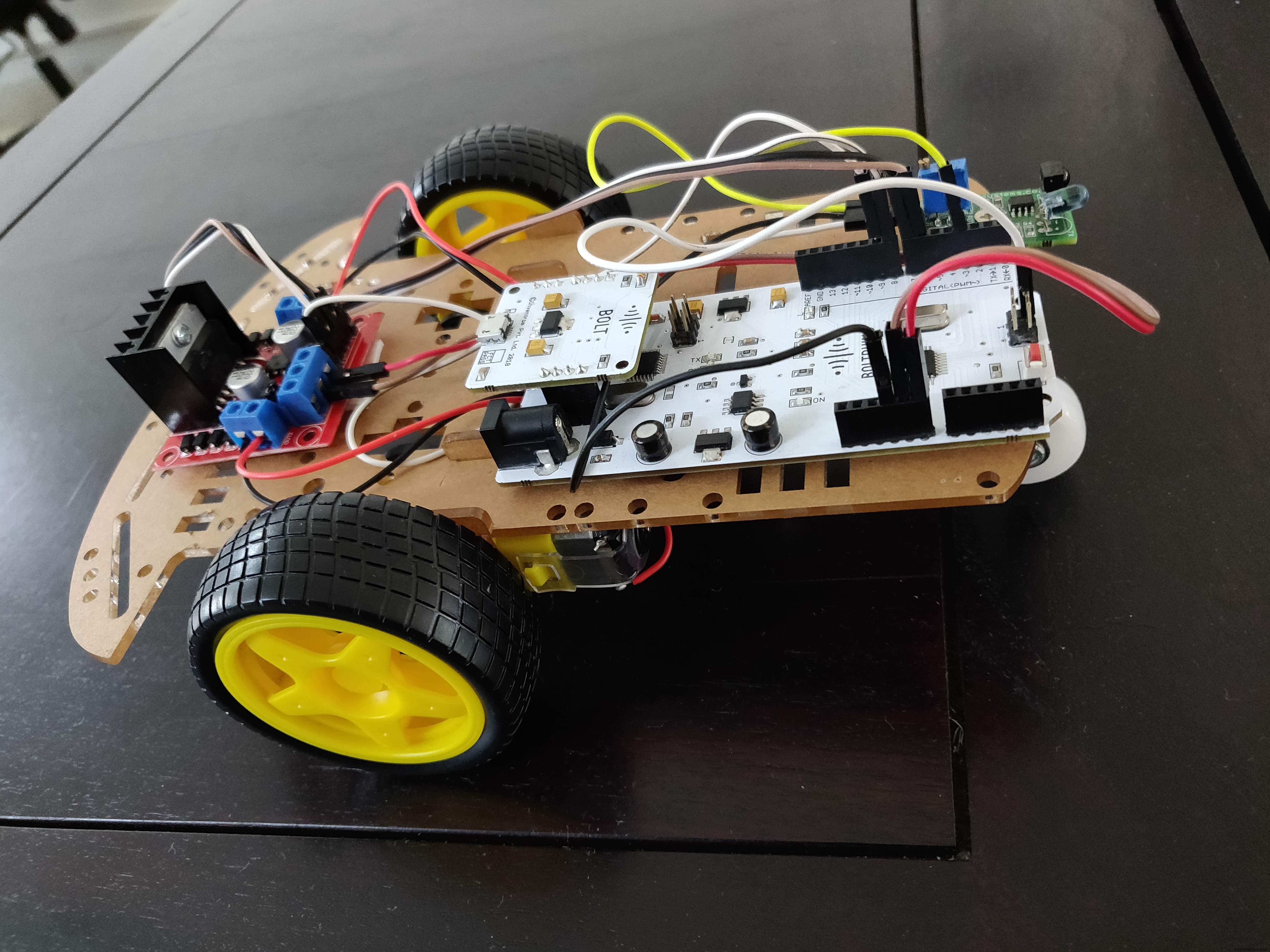
Voltamos em segurança da Floresta de Ferragens com todas as peças de que precisávamos. Era hora de Devashish, o Senhor Supremo de Hardwarey, fazer sua mágica e montar este pequeno Robô.

Veja como ele fez isso.
Montagem do hardware
1. Prenda a roda do rodízio na parte central dianteira do chassi, conforme mostrado.
2. Monte o chassi do carro robótico e prenda os dois motores CC usando as porcas e parafusos junto com as rodas fornecidas, conforme mostrado.
NOTA:Solde os fios ao terminal do motor antes de conectá-lo ao chassi.
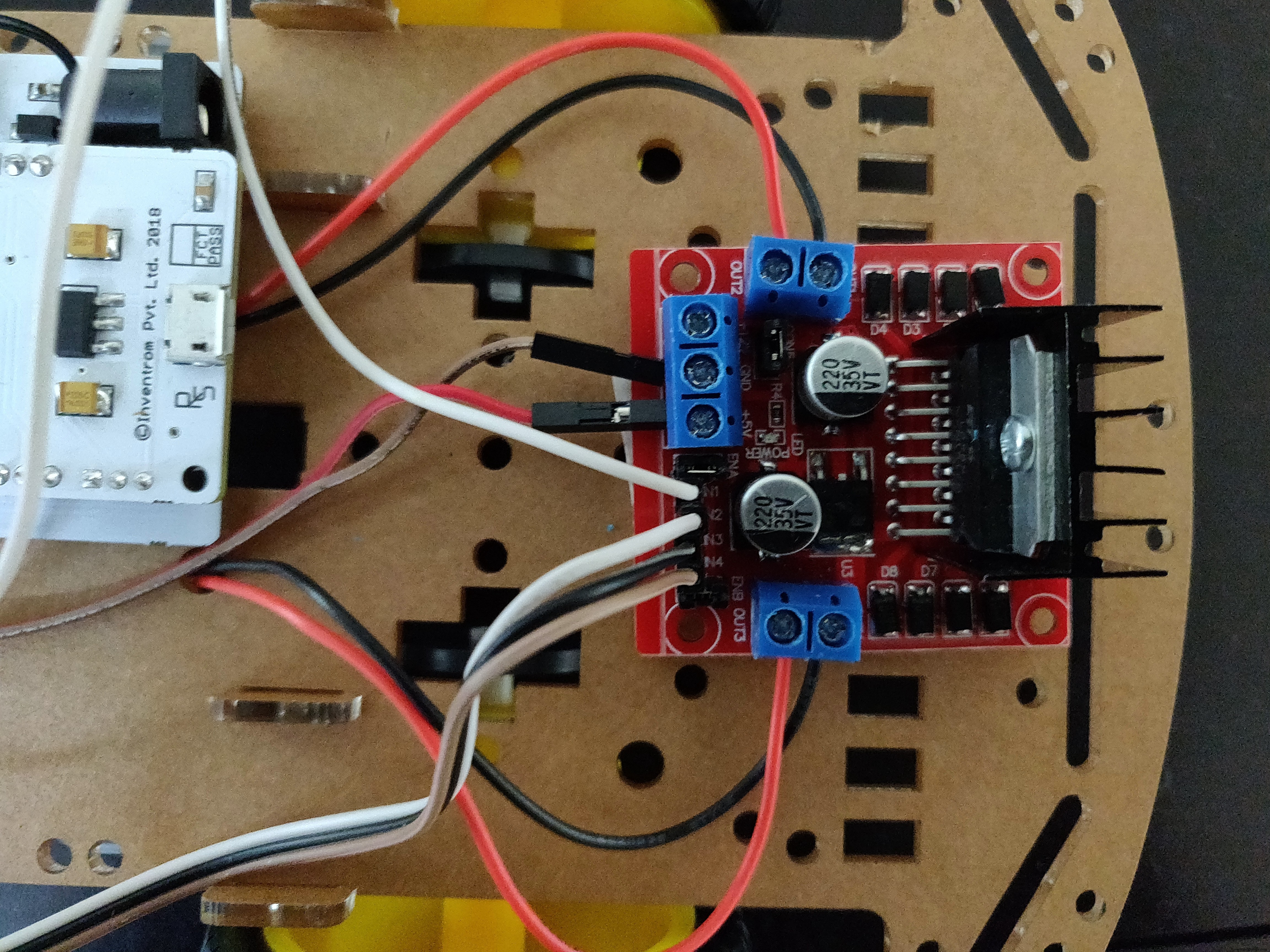
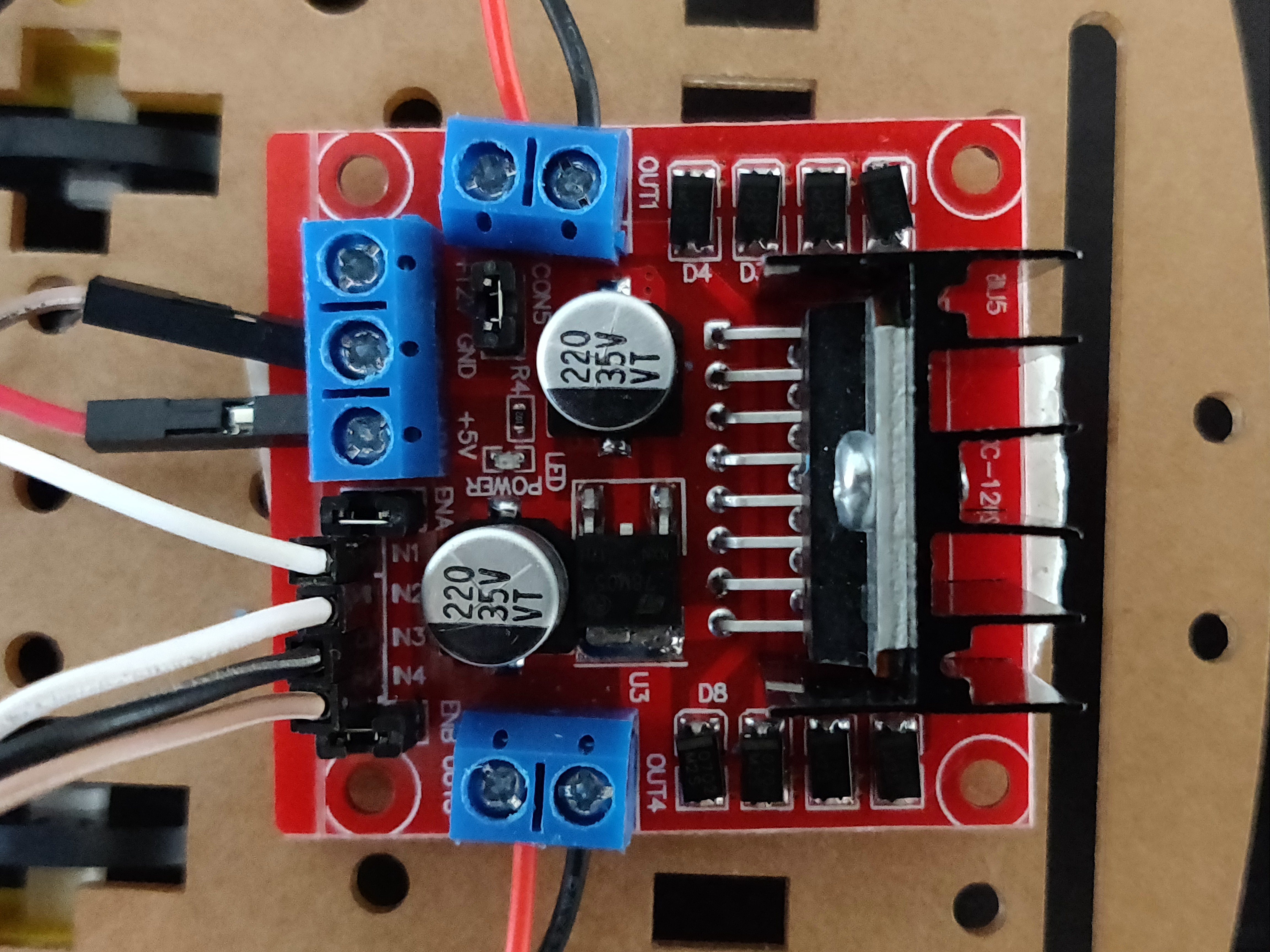
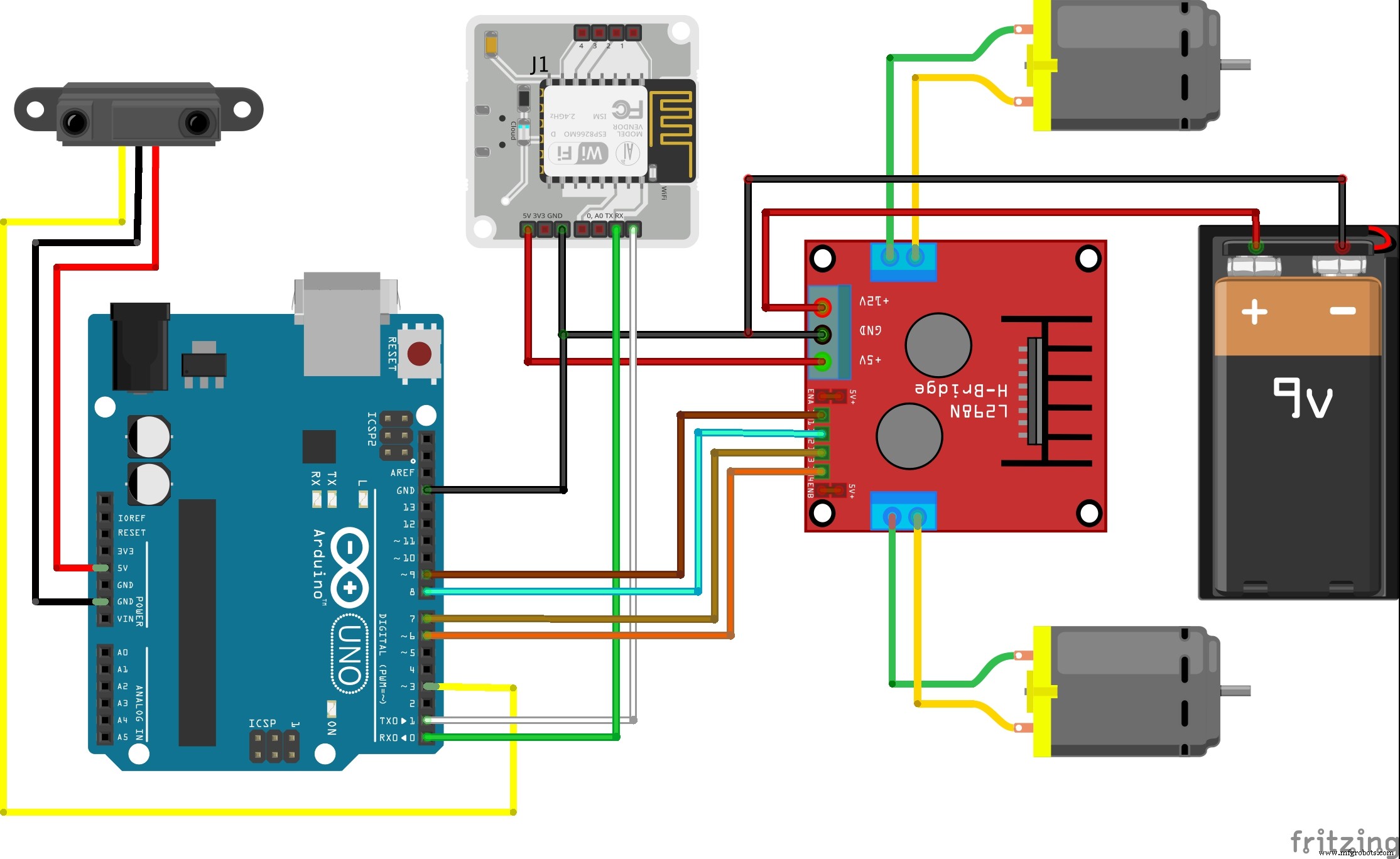
3. Agora conecte os terminais do motor ao módulo acionador de motor L298N conforme mostrado abaixo.
NOTA:Conecte ambos os terminais do motor no mesmo lado do módulo do driver.
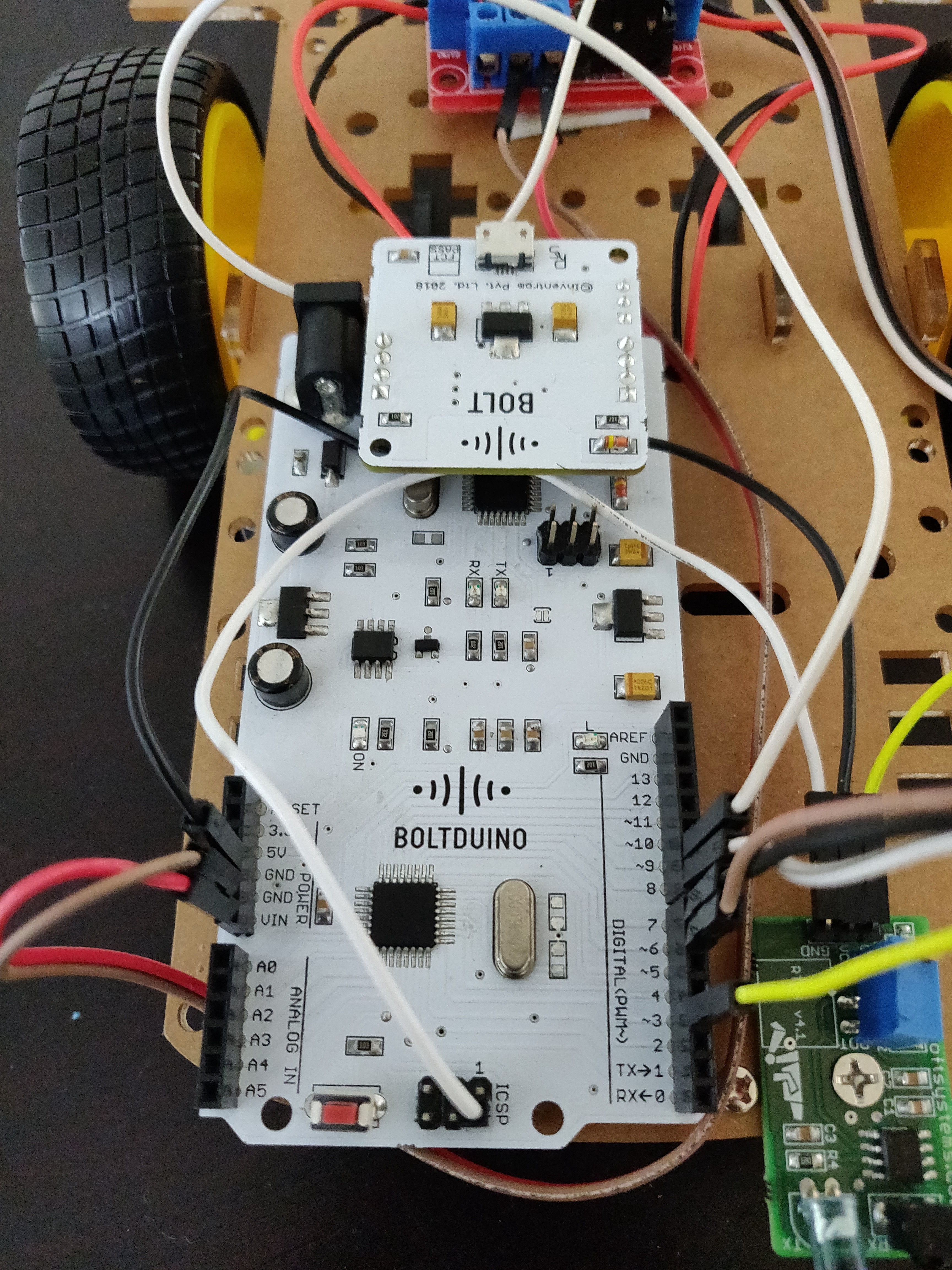
4. Conecte o pino 5V e o pino GND do módulo do driver a 5V e GND do Arduino, respectivamente.
5. Conecte os pinos 5V, GND, Tx e Rx do Bolt aos pinos 5V, GND, Rx e Tx do Arduino respectivamente. Para Boltduino, conecte a unidade do parafuso no slot presente.
6. Conecte os quatro terminais de entrada (IN1, IN2, IN3, IN4) aos pinos 6, 7, 8 e 9, respectivamente.
7. Conecte os pinos 5V, GND e OUT do sensor de proximidade aos pinos 5V, GND e 3 do Arduino, respectivamente.


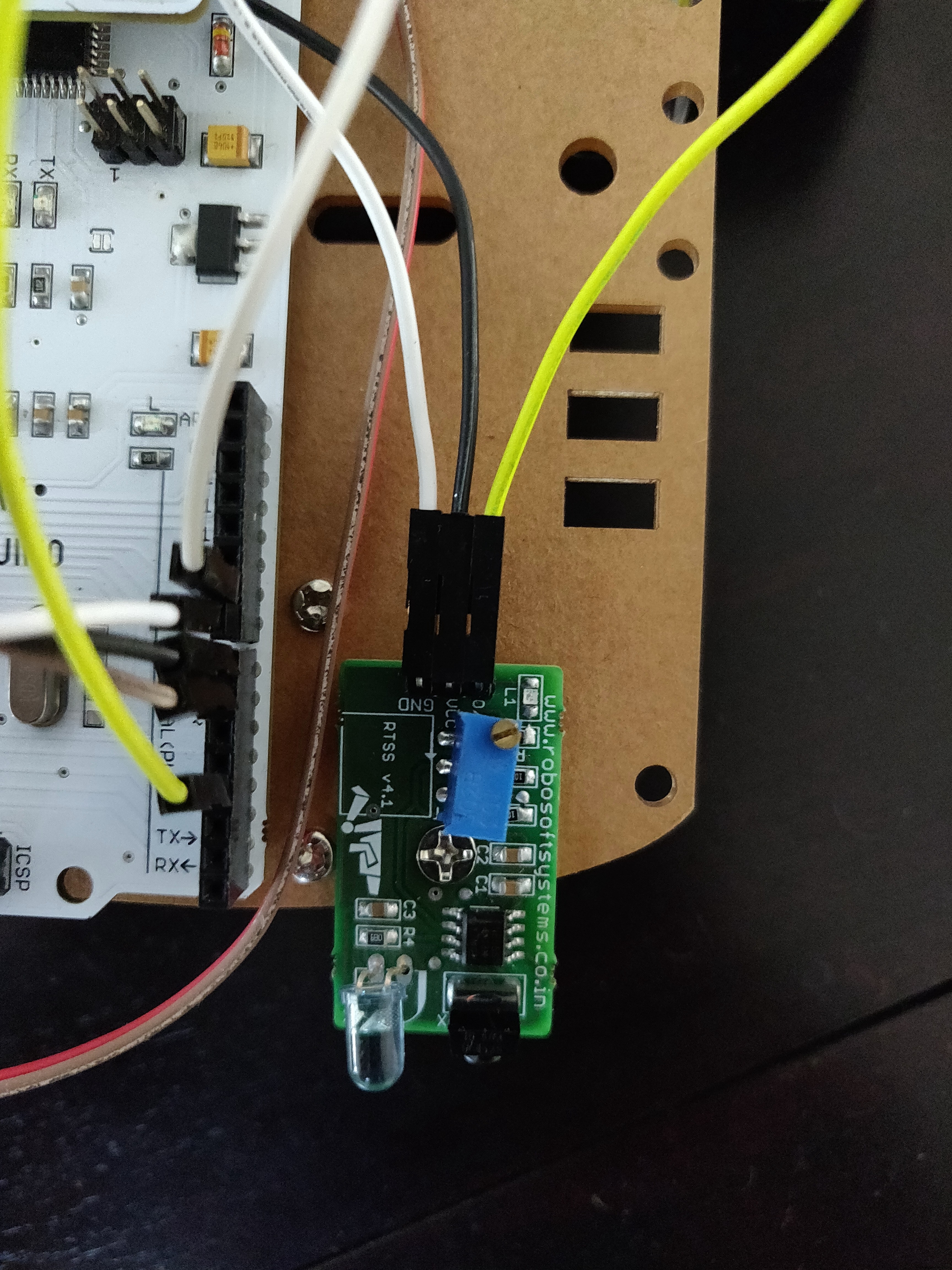
NOTA:Para qualquer ajuda adicional a examinar os esquemas fornecidos abaixo.
Conectando o Bolt à nuvem
Após a montagem do hardware, registre e conecte a unidade Bolt à Bolt Cloud. Saiba mais em registrar e conectar o parafuso à nuvem.
Ato quatro:e então houve a conectividade
Agora, o Senhor Supremo de Hardwarey mandou buscar o Assassino do Forno do Código (ou seja, eu).
Ele foi encarregado de dar vida a esse robô com seu código e conectá-lo à nuvem. Siga seus passos para fazer seu robô funcionar também.
Etapa 1: Obtenha o código.
Obtenha o código do repositório Github deste projeto. Baixe um arquivo .zip ou clone-o em seu sistema, como quiser.
Etapa 2: Trabalhando com o código.
Existem duas partes do código:
- Uma pasta chamada aplicativo
- Dentro desta pasta existem dois arquivos i. controller.html ii. controller.js. Falaremos sobre eles mais tarde.
- Depois, há o firmware para seu Arduino em um arquivo chamado Bolt_Robot_Car.ino . Isso será atualizado / carregado em seu Arduino.
Etapa 3: Configuração para cima Arduino.
Quando terminar de configurar seu hardware e conectar seu bolt à nuvem, carregue o firmware presente no arquivo Bolt_Robot_Car.ino para o seu Arduino. Para saber como configurar o IDE do Arduino e fazer upload de um código para o Arduino, siga este link.
Etapa 4: O Controlador App.
Clique duas vezes em controller.html arquivo e deverá ser apresentada a seguinte página da web.
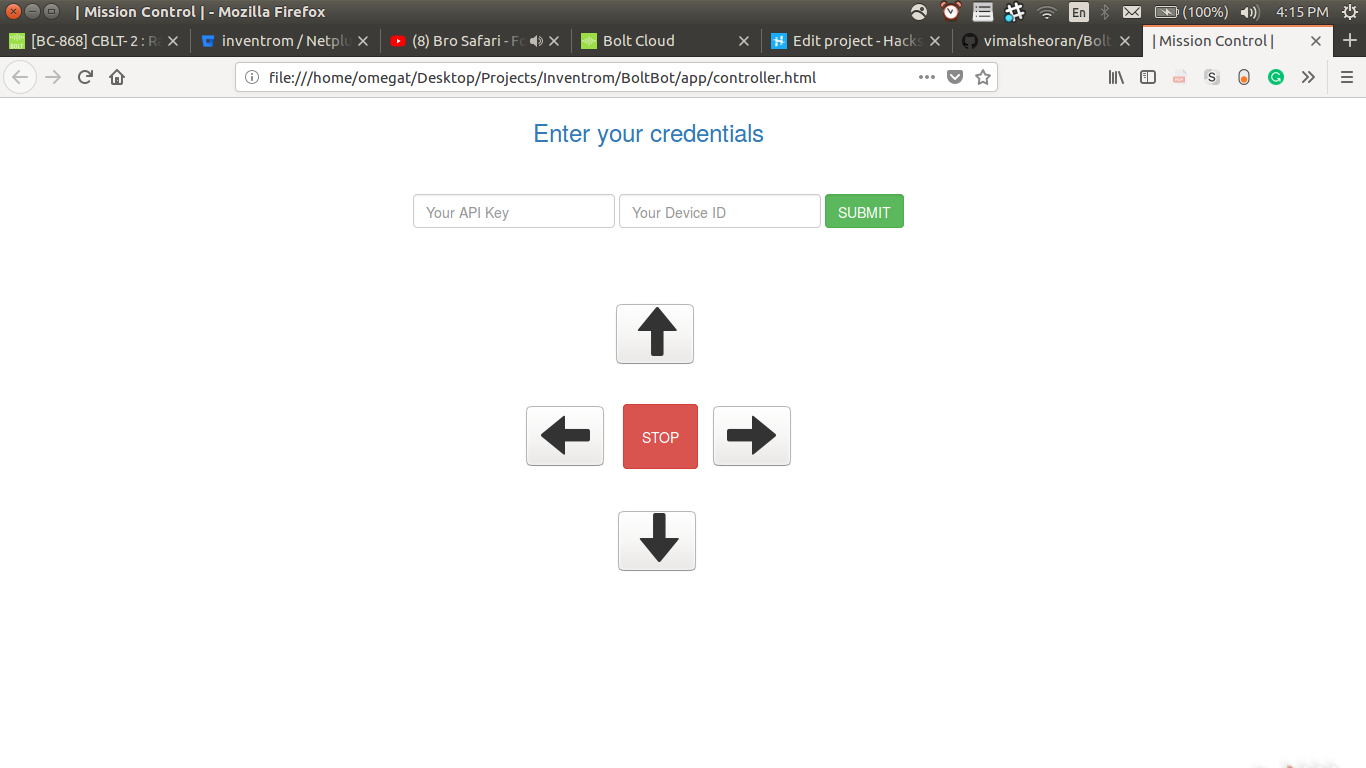
Agora insira sua chave de API e ID do dispositivo em seus respectivos campos e clique em ENVIAR. Você pode obter sua chave de API e ID do dispositivo do painel Bolt Cloud.
Depois disso, você pode usar os botões de controle para controlar o movimento do seu robô. Os pressionamentos de botão acionam funções JavaScript específicas (verifique o arquivo controller.js ) para enviar comandos para a Bolt Cloud e, em seguida, para o seu Módulo WiFi Bolt. Agora você tem um bot RC para fazer o que quiser com ele. Pode haver várias coisas feitas com isso, você pode anexar alguns sensores a ele ou torná-lo automático ou o que quiser. E se você errar, não se preocupe, nós, os nativos da Terra dos Criadores, estamos aqui para ajudá-lo a qualquer momento.
Ato Cinco:Ovos de Páscoa
Eu sei que alguns de vocês podem estar pensando "Ei, você disse que havia um recurso bônus, onde está?" bem, não se preocupe, não vamos deixá-lo chapado, mas há uma grande chance de você já ter notado o recurso em ActThree:Forjamento se não, dê uma olhada nele novamente. Mas, bem, quem tem esse tipo de tempo então TL; DR seu robô irá parar automaticamente se encontrar um obstáculo ou bloqueio em seu caminho para que você não acabe esmagando-o contra a parede. Certo, esse é o fim da história, dê uma olhada neste vídeo para conferir o tutorial em vídeo para este projeto.
Demonstração:
Código
BoltBot
https://github.com/vimalsheoran/BoltBotEsquemas
Processo de manufatura
- Componentes principais de um carro e suas funções
- Robô Raspberry Pi controlado por Bluetooth
- Robô controlado por gestos usando Raspberry Pi
- ROBÔ WIFI RASPBERRY PI CONTROLADO PELO TELEFONE INTELIGENTE ANDROID
- Núcleo IoT do Windows 10:robô controlado por fala
- Robô controlado por Wi-Fi usando Raspberry Pi
- ROObockey:Robô de hóquei de rua com controle remoto e auxílio de mira
- Carro RC controlado por joystick
- Robô controlado por fala
- Braço do robô controlado por Ethernet