


Tempo de ciclo do robô:como calcular e otimizar seu tempo
Se você deseja maximizar seu investimento em robótica, precisa otimizar o tempo de ciclo do robô.
Tempo (como dizem) é dinheiro. Os robôs realizam muitos ciclos por dia. Quando um robô se move desnecessariamente devagar ou de forma ineficiente, isso pode significar que você está perdendo dinheiro.
Mesmo reduzindo 2 segundos do tempo de ciclo do robô pode economizar centenas de horas de trabalho ao longo de um ano.
Como você calcula isso?
E como você pode garantir que não está perdendo dinheiro sem saber?
Aqui está um guia claro para você.
O que é o tempo de ciclo do robô?
O tempo de ciclo do robô é o tempo que um robô leva para completar um ciclo completo de sua tarefa programada. Inclui tanto o tempo de valor agregado — quando o robô está se movendo ou realizando a operação — quanto qualquer tempo de espera sem valor agregado.
A pesquisa mostrou que tempos de ciclo mais baixos resultam em custos reduzidos por peça de trabalho. Quanto maior o tempo de ciclo, mais custa criar seus produtos.
Como os robôs são muito consistentes, o tempo de ciclo tem um impacto poderoso na produtividade geral do robô. Quaisquer ineficiências ou perda de tempo acontecerão a cada ciclo. Assim, a ineficiência é multiplicada.

Tempo é dinheiro! A necessidade de otimizar o tempo de ciclo
Por que é importante reduzir o tempo de ciclo de um robô? Porque tempo é dinheiro!
Imagine que você tenha um robô realizando 1.000 ciclos por dia durante 5 dias por semana. Tirar apenas 2 segundos do tempo do ciclo economizaria 33 minutos por dia. Esta é uma economia de 144 horas por ano!
Como diz o integrador de sistemas Adil Shafi, o tempo de ciclo é “uma das justificativas financeiras mais importantes no caso de negócios para robótica. Cada fração de segundo que algo pode ser feito mais rápido se traduz diretamente em dólares.”
Você deve estar sempre atento a maneiras de reduzir o tempo de ciclo do seu robô, mesmo que seja apenas um pouco. Com o tempo, isso pode significar uma grande economia.
Quais fatores afetam o tempo de ciclo do robô?
Vários fatores afetam o tempo de ciclo do seu robô. Alguns deles estão sob seu controle para mudar. Outros não são.
Os fatores que o afetam incluem:
- O modelo do robô
- O modelo e a configuração do controlador
- Especificidades da tarefa que você está realizando
- A velocidade e a aceleração do robô
Alguns fatores estão relacionados a diferenças sutis entre robôs físicos. Como resultado, nem sempre é possível obter um cálculo de tempo de ciclo completamente preciso em um simulador de robô. Mas você pode chegar bem perto com a ferramenta certa.
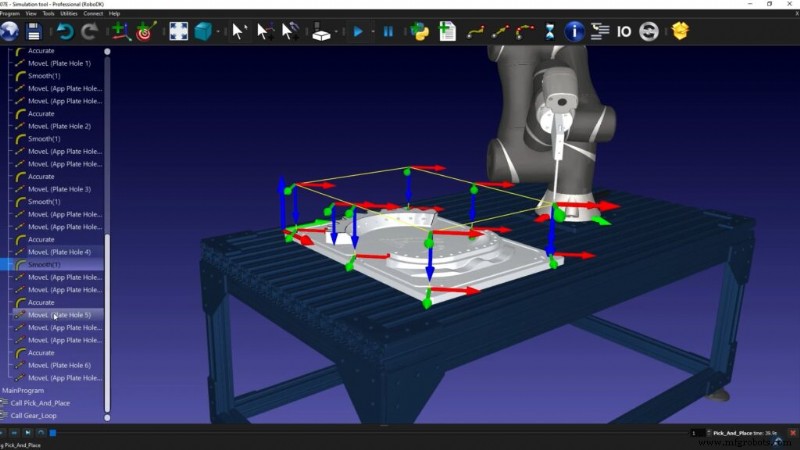
Como calcular o tempo de ciclo do robô com o RoboDK
Antes que você possa melhorar seu tempo de ciclo, primeiro você precisa calculá-lo. É aqui que você pode se beneficiar de um bom simulador de robô.
O RoboDK inclui a estimativa de tempo de ciclo como funcionalidade central do software.
As etapas para estimar seu tempo de ciclo no RoboDK são:
- Defina a velocidade e a aceleração da articulação do seu robô com a maior precisão possível.
- Adicione arredondamento a qualquer movimento relevante do robô (veja abaixo).
- Esteja ciente de atrasos e pausas no programa do robô. O software também irá adicioná-los ao tempo de ciclo.
- Mova seu robô para a posição inicial desejada. Isso garante que o RoboDK não adicione um movimento desnecessário ao início do cálculo.
- Execute o programa do robô completamente. Quando o programa terminar, você verá o tempo de ciclo estimado no canto inferior direito da tela.
Simples!
Qual é a precisão da estimativa de tempo de ciclo do RoboDK?
Pelas razões explicadas acima, a estimativa do tempo de ciclo não pode ser completamente precisa. Ele não pode dizer o tempo de ciclo exato que você alcançará no robô físico.
Nos testes que realizamos, é comum que o tempo de ciclo tenha cerca de 95-99% de precisão quando comparado à execução da mesma tarefa no robô físico. Isso geralmente é mais do que suficiente para começar a otimizar sua tarefa de robô.
Quanto mais precisa for sua simulação, mais precisa será a estimativa do tempo de ciclo.
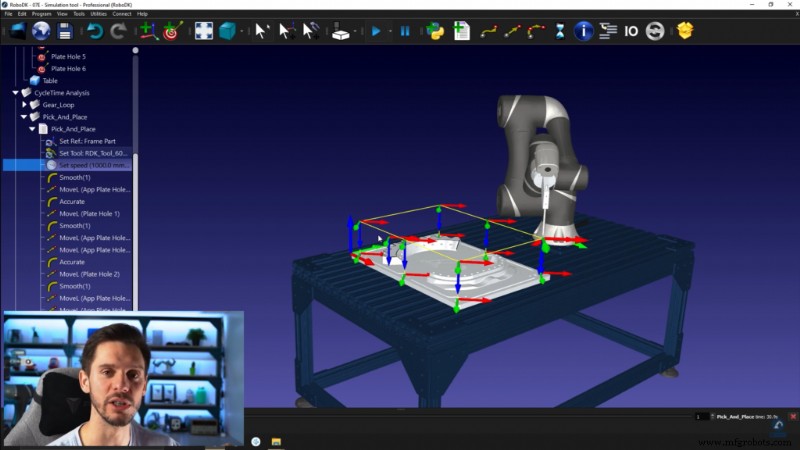
Ferramenta de bônus:estudo detalhado do tempo de ciclo
Há uma ferramenta adicional no RoboDK que fornece informações extras úteis sobre o tempo de ciclo de sua tarefa.
Ao acessar o menu Ferramentas e selecionar “Executar Script” você verá as 3 ferramentas a seguir:
- CycleTimeStudy — Isso ajuda você a escolher as melhores velocidades de articulação para o seu robô. Ele fornece uma comparação detalhada das diferentes velocidades lineares e conjuntas do seu robô, com o tempo de ciclo estimado para cada um com seu programa atual.
- ExibiçãoCycleTime — Isso exibe o tempo de ciclo do seu robô atual conforme calculado acima para um programa de robô específico.
- CycleTimeDisplayAll — Isso exibe as estimativas de tempo de ciclo para todos os programas do robô em sua árvore de projeto atual.
3 maneiras inteligentes de otimizar o tempo de ciclo do robô
Agora que você conhece o tempo de ciclo do seu robô, como você pode otimizá-lo?
Aqui estão 3 ótimas maneiras de otimizar o tempo de ciclo:
1. Adicione arredondamento aos movimentos do seu robô
O arredondamento é um método para reduzir este stop-start fazendo com que o robô se mova ao longo de uma ligeira curva em vez de ir para o canto. Isso reduz o tempo de ciclo. Você só deve usá-lo para caminhos onde você não precisa de um movimento altamente preciso.
Toda vez que seu robô se move para um canto de um movimento, ele terá que parar e reiniciar seu movimento. Por exemplo, para um robô seguindo um caminho quadrado, ele irá parar em cada um dos cantos do quadrado.
2. Otimize a velocidade e a aceleração do robô
Existe um delicado equilíbrio entre a velocidade e a aceleração do robô. Alterar um deles, ou ambos, pode ter um impacto significativo no seu tempo de ciclo.
A velocidade e as acelerações são diferentes para cada modelo de robô. Experimente diferentes velocidades e acelerações para encontrar a melhor configuração para seu robô e tarefa.
3. Acompanhe as métricas e melhore continuamente
A melhor maneira de otimizar qualquer coisa é rastreá-la e melhorá-la continuamente ao longo do tempo. Isso exige que você escolha as métricas certas.
A primeira métrica a ser rastreada ao otimizar sua tarefa do robô é o próprio “tempo de ciclo”. Para cada alteração que você fizer no programa do robô, anote seu efeito no tempo de ciclo. Com o tempo, você também pode acompanhar métricas como “número de ciclos por dia” ou “ciclos concluídos”.
Assista ao nosso treinamento gratuito sobre o tempo de ciclo do robô
Você quer ver como usar o recurso do RoboDK para melhorar sua própria célula robótica?
Você pode aprender ainda mais em nosso treinamento em vídeo gratuito. Na lição de tempo de ciclo, você descobrirá o processo do início ao fim.
Você pode assistir a aula de tempo de ciclo aqui.
Primeiro, é uma boa ideia assistir primeiro à lição sobre arredondamento e à lição sobre aceleração do robô.
Que perguntas você tem? Conte-nos nos comentários abaixo ou participe da discussão no LinkedIn, Twitter, Facebook, Instagram ou no Fórum RoboDK. Além disso, confira nossa extensa coleção de vídeos e inscreva-se no canal RoboDK no YouTube
A abordagem mais flexível para aparafusamento automatizado
Ferramentas de programação de robôs:como elas afetam as prioridades de negócios
Robô industrial
- Como obter data e hora atuais em Python?
- Como otimizar sistemas de manufatura e economizar tempo
- Como construir e otimizar um cronograma de manutenção preventiva
- Como otimizar seu programa de PM
- Whitepaper:Como Encontrar o Potencial do Seu Robô
- Como calcular e melhorar a disponibilidade da máquina
- Como escolher sua máquina industrial?
- Como simplificar a fabricação e o envio
- Como reduzir o tempo de treinamento para soldagem de robôs
- Como sei que é hora de comprar um robô?