


Motor de passo v. motor DC - Como eles são diferentes
Os motores elétricos são componentes essenciais na conversão de energia elétrica em energia mecânica. No entanto, embora todos os motores desempenhem a mesma função, escolher o motor certo é útil para fornecer torque máximo. Assim, neste artigo, vamos distinguir entre o motor de passo e o motor dc. Além disso, identificaremos as propriedades críticas dos servomotores.
Motor de passo
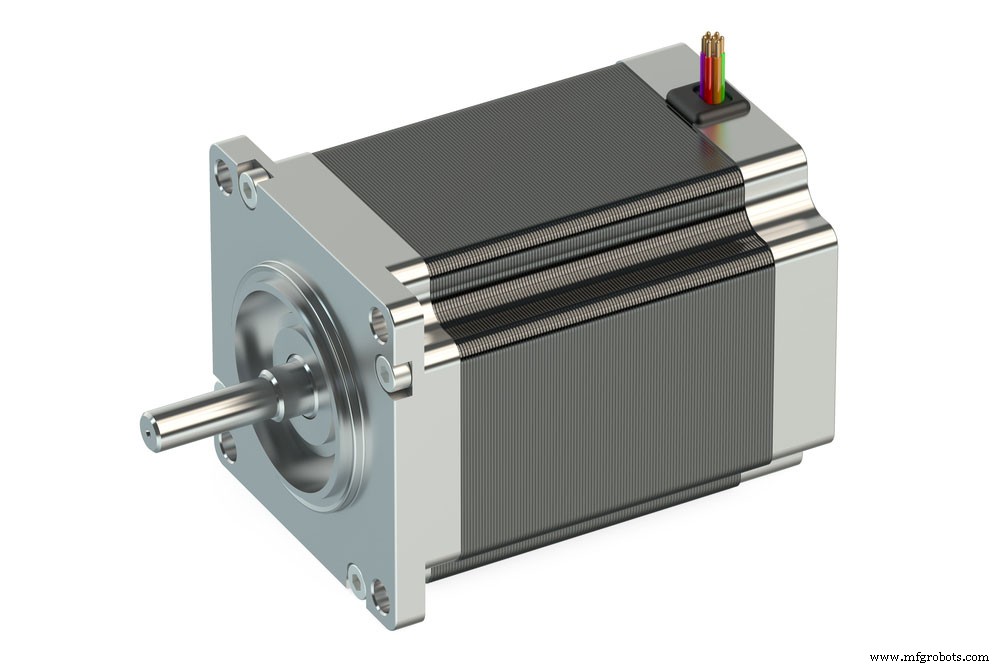
Fig 1:Um Motor de Passo
Definição
Principalmente, é um motor DC sem escovas que gira em etapas discretas.
Além disso, com passo controlado por computador, é possível realizar controle de velocidade e posicionamento extremamente precisos. Assim, os motores de passo são populares em usos de controle de movimento de precisão.
Componente
Possui vários eletroímãs dentados em torno de uma engrenagem central. Este arranjo é útil para definir a posição. Além disso, um motor de passo de ímã permanente usa energia de corrente contínua. No entanto, faltam as escovas e o comutador mecânico sinônimo de motores DC. Portanto, é um motor DC sem escovas.
Princípio de funcionamento
O motor possui um sistema de controle responsável por enviar pulsos elétricos para um driver. Posteriormente, o motorista decifra os impulsos. Por sua vez, ele transmite uma tensão proporcional de volta ao motor.
Em seguida, o motor irá girar em incrementos angulares fixos. É daí que deriva o nome de motor de passo. Além disso, observe que uma corrente alternada controla a polaridade das bobinas.
Vantagens e limitações
As vantagens do motor de passo incluem o seguinte:

Fig 2:Uma impressora 3D de metal
- Primeiro, eles são úteis para facilitar aplicações de posicionamento preciso, como plotadoras X, Y e impressoras 3D.
- Além disso, eles permitem o controle preciso da velocidade de rotação.
- Em terceiro lugar, eles apresentam baixo torque em baixas velocidades.
- Por fim, eles são fáceis de controlar.
Suas limitações fundamentais incluem
- Os motores têm baixa eficiência. Eles consumirão mais corrente quando estiverem sem carga.
- Além disso, quando a velocidade do motor é alta, seu torque é significativamente baixo em comparação com o funcionamento em baixas velocidades.
- E a maioria não tem feedback integral sobre a posição. Eles são relativamente barulhentos durante o uso.
- Por fim, ao executar com cargas altas, eles podem pular algumas etapas.
Aplicativos
- impressoras 3D
- Aplicativos de imagens médicas
- Câmeras de segurança
- Robótica
- Fresadoras CNC
Servomotor

Fig 3:Ilustração 3D de um servomotor
Definição
Pertence aos tipos de motores DC. No entanto, este motor síncrono não funciona continuamente por um período prolongado.
Componente
Principalmente, este motor depende de um sistema de feedback para detectar a diferença entre a velocidade real e a desejada. Assim, o feedback facilita o ajuste da saída na correção de um desvio da posição desejada. É útil para melhorar o posicionamento preciso.
Existem dois tipos de servos, a saber:
Servos de motor de rotação contínua
Eles podem girar continuamente no sentido horário ou anti-horário. Além disso, eles podem se mover em diferentes faixas de velocidade conforme guiado pelo sinal de comando. Assim, eles são úteis para uma gama mais ampla de aplicações do que motores posicionais.
Servos de rotação posicional
Eles são úteis em projetos de pequena escala para obter um posicionamento preciso moderado. Além disso, eles giram em um ângulo de 180 graus e não ajudam na rotação contínua e no controle de velocidade.
Princípio de funcionamento

Fig 4:Um servomotor
O design do motor interno apresenta um arranjo exclusivo das engrenagens, útil para mitigar a alta velocidade dos motores internos. Simultaneamente, há um aumento significativo na saída de torque.
Portanto, o design da engrenagem dos servos e a velocidade de rotação são imperativos para gerar alto torque. Também digno de nota é que o servo possui um microcontrolador útil na correção do sinal de erro. Esses sinais de controle ajudam a mover o rotor para a posição final.
Motor de passo versus motor CC – Vantagens e limitações
Méritos dos servomotores
- Eles têm saída de alto torque ao girar em altas velocidades. Principalmente, isso se deve ao sistema de controle de feedback de malha fechada, que é melhor do que o sistema de malha aberta do motor de passo.
- Além disso, eles estão disponíveis em uma ampla variedade de tamanhos e classificações de torque
- Por último, eles são relativamente baratos, pois alguns são feitos de plástico, o que também os torna leves.
Desvantagens dos servomotores
- Motores posicionais têm uma limitação de rotação. Eles só podem girar em um ângulo de 180 graus.
- Além disso, eles são sinônimos de espasmos durante o controle posicional. Principalmente é por causa do mecanismo de feedback que procura corrigir qualquer mudança da posição pretendida.
Aplicativos
- Tecnologia e robótica de elevadores
- Telescópios e câmeras
- Aplicativos de controle industrial
Motor de passo vs. Motor DC– Motores DC

Fig 5:Vários motores CC
Definição
São dispositivos com bobina eletromagnética e condutores cujas interações transformam energia elétrica em energia mecânica. Os dois tipos comuns de motores CC incluem motores sem escovas e motores com escovas. Além disso, existem diferentes tamanhos de motores CC.
Componente
Destaca-se que o nome escovado vem das duas escovas metálicas estacionárias que fornecem corrente de enrolamento ao motor. Os outros componentes principais incluem o estator estático e a armadura rotativa
Motor de passo versus motor DC – Princípio de funcionamento
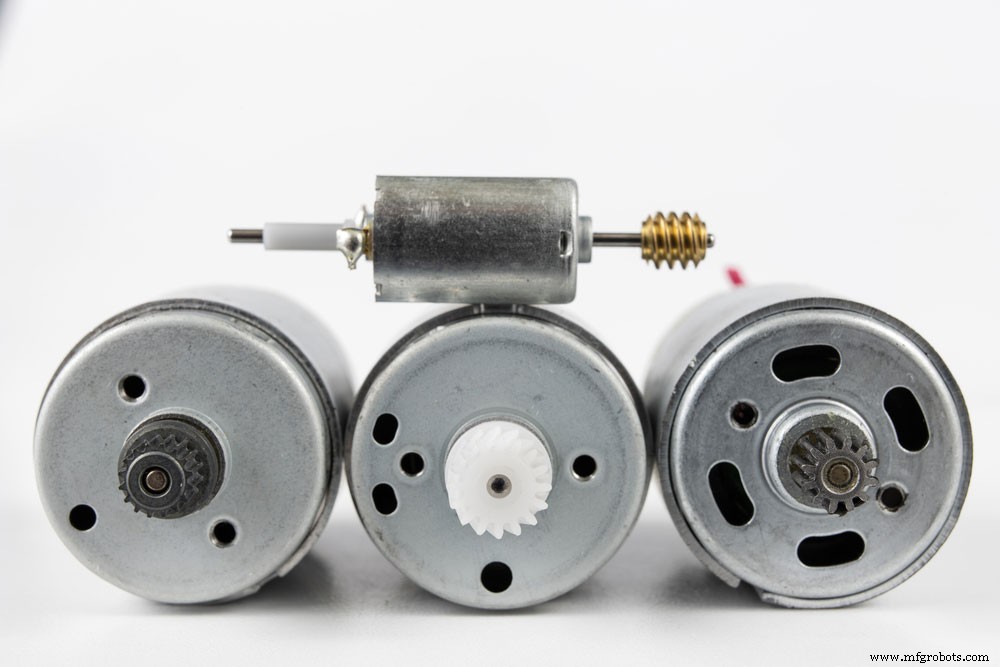
Fig 6:Motores CC
O estator fornece o campo magnético rotativo, que solicita a rotação da armadura. Além disso, um par de ímãs é útil para envolver as bobinas eletromagnéticas ao redor das bobinas. Assim, quando a corrente do enrolamento no fio passa por um campo magnético, ela induz uma força. Por sua vez, isso inicia a rotação das bobinas.
Motor de passo versus motor CC – Vantagens e limitações dos motores CC escovados
Vantagens
- Eles são fáceis de controlar, pois tudo o que se precisa é a aplicação de uma tensão.
- Em segundo lugar, eles fornecem saída de alto toque em velocidades relativamente baixas. Além disso, sua geração de energia mecânica é alta com uma eficiência de aproximadamente 75 a 80%.
- Eles são relativamente baratos e, portanto, acessíveis.
Desvantagens
- Eles são propensos a ruído eletromagnético e ruído físico durante a rotação.
- Além disso, os motores requerem manutenção regular, pois a taxa de rasgo e desgaste das escovas é significativamente alta.
Aplicativos
- Perfuratrizes sem fio
- Aplicações industriais
- Vibradores de celular
- Fãs portáteis
A diferença entre motor de passo vs. servomotor vs. motor DC
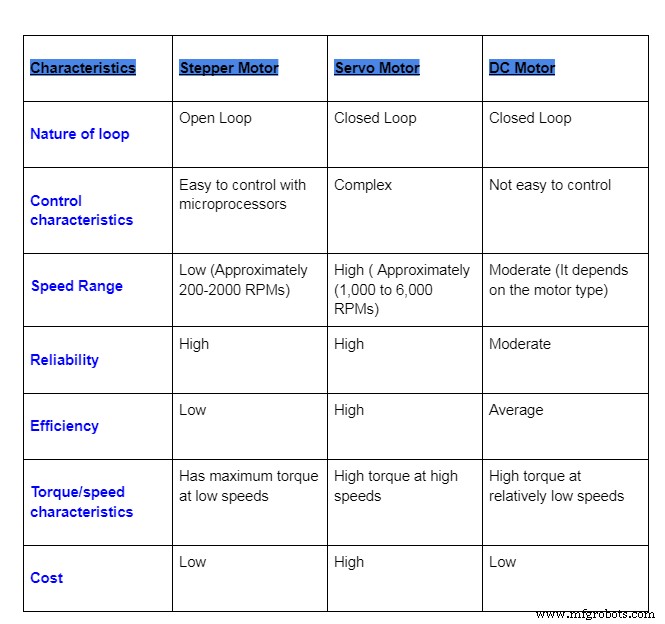
Conclusão
Em poucas palavras, esses três motores são adequados para diferentes funções conforme elaboramos. Agora você tem todas as principais diferenças entre os três tipos de motores. No entanto, se houver algum esclarecimento adicional que você queira fazer, fale conosco.
Sensores de distância:um guia completo
Sensores de luz – Princípios de funcionamento, tipos e aplicação
Tecnologia industrial
- Potenciômetro como um Reostato
- Motores de indução monofásicos
- Motores do comutador CA
- Protótipo da Raspoulette
- Motores elétricos superdimensionados:eles devem ser substituídos?
- Como verificar um motor CC
- O que é um planejador de manutenção?
- O que é um Motor Linear?
- O que é um servo motor?
- O que é fabricação por contrato?