


Bot Seguidor Humano
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicativos e serviços online
 |
|
Sobre este projeto
Ei Guyzz ...
Nesta pandemia, espero que todos estejam em casa e em segurança.
Fiz um novo projeto chamado Human following Bot.
assista ao vídeo completo para fazer esse projeto em casa.
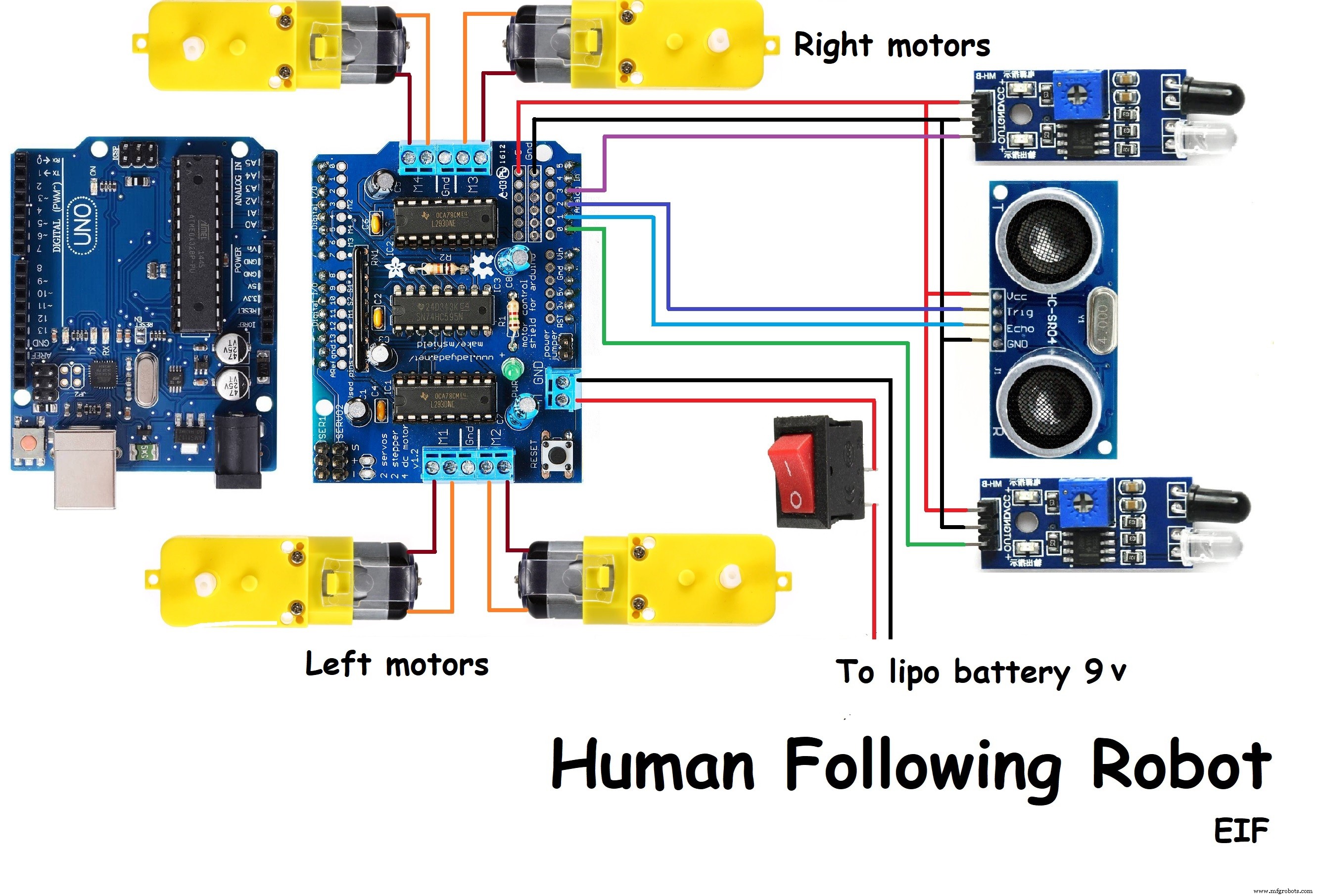
Ele usou 2 sensores IR e um sensor ultrassônico. Sensores infravermelhos usados para seguir o ser humano ou objeto e o sensor ultrassônico é usado para mover o robô para trás.
Se você gosta desse projeto, respeite-o.
Dê-me sugestões para que eu possa melhorá-lo ou qualquer feedback que você queira dar ao meu canal no YouTube.
o link é:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Além disso, você pode me dar sugestões sobre "O que fiz no próximo projeto.?"
Passos parafazer este projeto:
1. Reúna componentes como Arduino, motoredutores Dc com rodas, 2 sensores IR, sensor ultrassônico, servo motor, papelão, proteção do driver do motor l293d, bateria de 9 V, interruptor, fios de ligação etc.
2. Pegue o papelão e coloque todos os 4 motores com rodas para fazer um carro.
3. Coloque os sensores IR no carro.
4. Fixe o servo motor no carro.
5. Coloque o sensor ultrassônico na caixa e adicione a alça a ele, depois conecte-o ao servo motor.
6. Conecte o arduino e a blindagem do motor l293d no carro.
7. Faça as conexões conforme mostrado no diagrama do circuito.
8. Carregue o código e conecte a chave com bateria ao escudo do driver do motor l293d.
Ajuste a sensibilidade dos sensores IR.
Seu projeto está pronto ... !!!
Visite meu canal no YouTube uma vez e veja mais projetos interessantes.
"Eletrônica é divertido"
Se você gosta do meu canal, inscreva-se, por favor.
link:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Código
- Código
Código Arduino
// www.YouTube.com/Electronics is Fun //#include#include #define LEFT A0 # define echopin A1 // pino de eco # define trigpin A2 // Trigger pin #define RIGHT A3AF_DCMotor Motor1 (1, MOTOR12_1KHZ); AF_DCMotor Motor2 (2, MOTOR12_1KHZ); AF_DCMotor Motor3 (3, MOTOR34_1KHZ); AF_DCMotor Motor4 (4, MOTOR34_1KHZ); Servo mys; int pos =0; muito tempo; void setup () {Serial.begin (9600); myservo.attach (10); for (pos =90; pos <=180; pos + =1) {myservo.write (pos); atraso (15);} para (pos =180; pos> =0; pos- =1) {myservo.write (pos); atraso (15);} para (pos =0; pos <=90; pos + =1) {myservo.write (pos); delay (15);} pinMode (RIGHT, INPUT); pinMode (LEFT, INPUT); pinMode (trigpin, OUTPUT); pinMode (echopin, INPUT);} void loop () {unsigned int distance =read_cm (); int Right_Value =digitalRead (RIGHT); int Left_Value =digitalRead (LEFT); Serial.print ("R ="); Serial.print (Right_Value); Serial.print ("L =" ); Serial.print (Left_Value); Serial.print ("D ="); Serial.println (distância); if ((Right_Value ==1) &&(distance> =10 &&distance <=30) &&(Left_Value ==1)) {forword ();} else if ((Right_Value ==0) &&(Left_Value ==1) ) {turnRight ();} else if ((Right_Value ==1) &&(Left_Value ==0)) {turnLeft ();} else if ((Right_Value ==1) &&(Left_Value ==1)) {stop ( );} else if (distance> 5 &&distance <10) {stop ();} else if (distance <5) {backword ();} delay (50);} long read_cm () {digitalWrite (trigpin, LOW); atrasoMicrosegundos (2); digitalWrite (trigpin, HIGH); atrasoMicrosegundos (10); tempo =pulseIn (echopin, HIGH); return time / 29/2;} void forword () {// liga-o indo para frenteMotor1.setSpeed (120); Motor1.run (FORWARD); Motor2.setSpeed (120); Motor2.run (FORWARD); Motor3.setSpeed (120); Motor3.run (FORWARD); Motor4.setSpeed (120); Motor4.run (FORWARD);} void backword () {// a outra maneiraMotor1.setSpeed (120); Motor1.run (BACKWARD); Motor2.setSpeed (120); Motor2.run (PARA TRÁS); Motor3.setSpeed (120); Motor3.run (PARA TRÁS); Motor4.setSpeed (120); Motor4.run (PARA TRÁS); } void turnRight () {// o outro rightMotor1.setSpeed (200); Motor1.run (FORWARD); Motor2.setSpeed (200); Motor2.run (FORWARD); Motor3.setSpeed (100); Motor3.run (BACKWARD) ); Motor4.setSpeed (100); Motor4.run (BACKWARD);} void turnLeft () {// liga-o indo para a esquerdaMotor1.setSpeed (100); Motor1.run (BACKWARD); Motor2.setSpeed (100); Motor2 .run (BACKWARD); Motor3.setSpeed (200); Motor3.run (FORWARD); Motor4.setSpeed (200); Motor4.run (FORWARD);} void stop () {// stopMotor1.setSpeed (0); Motor1.run (RELEASE); Motor2.setSpeed (0); Motor2.run (RELEASE); Motor3.setSpeed (0); Motor3.run (RELEASE); Motor4.setSpeed (0); Motor4.run (RELEASE); }
Esquemas
Processo de manufatura