


Braço do robô com controlador
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Aplicativos e serviços online
 |
|
Sobre este projeto
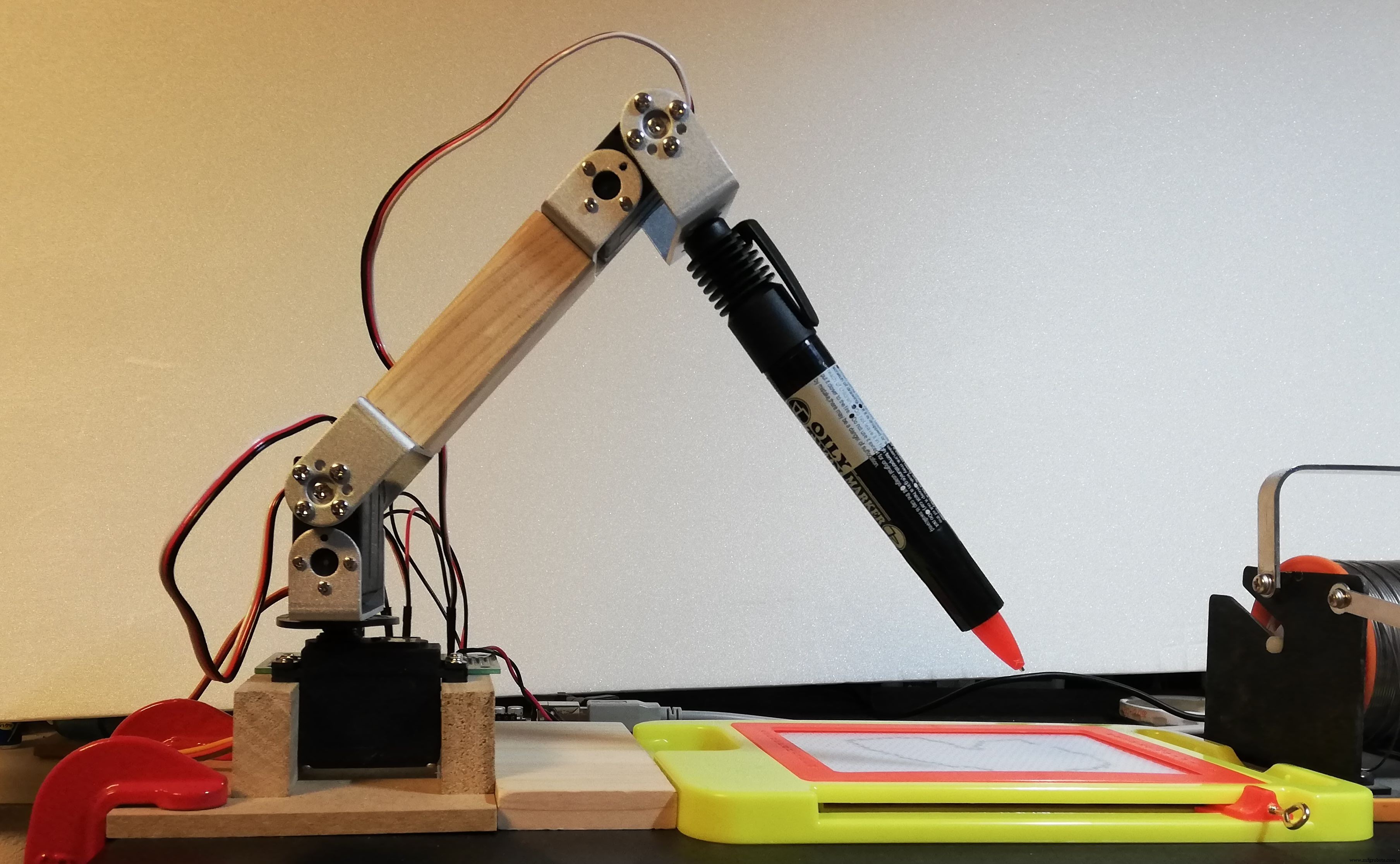
Fiz obot braço e seu controlador.
Constituição
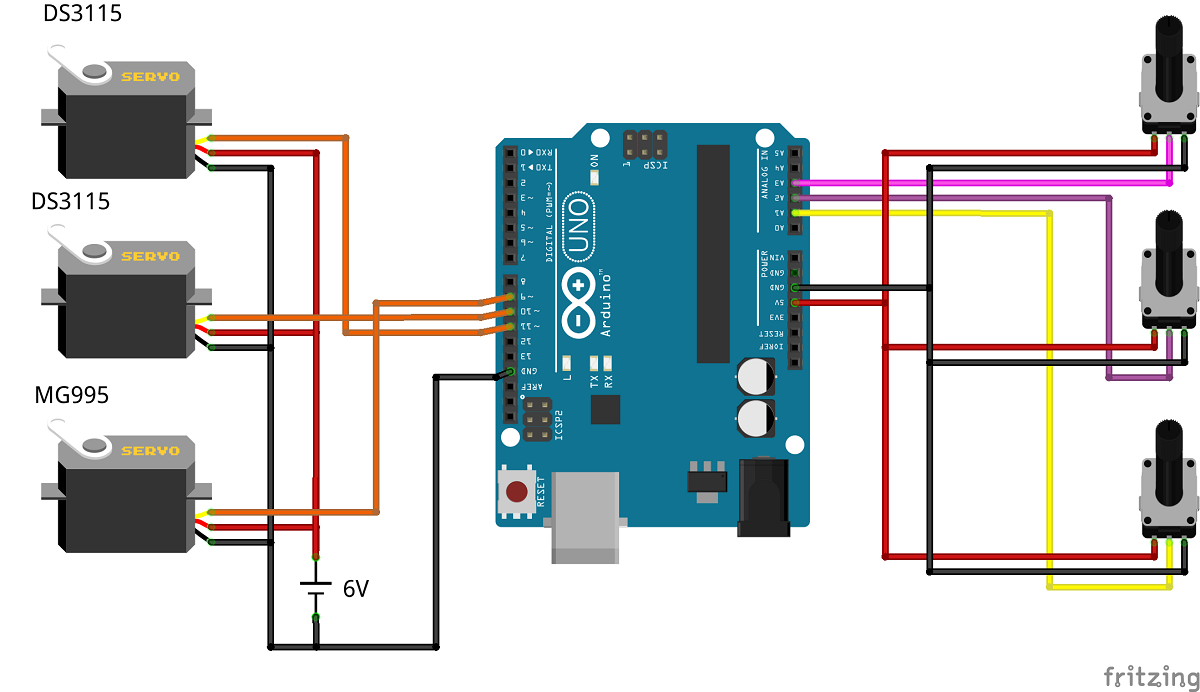
O braço do robô usa três servos PWM convencionais e cada ângulo é controlado por um resistor variável. O potenciômetro rotativo usou a curva B de 10k ohm.
Produção de braço de robô
Dois servo motores DS3115 foram usados na direção vertical e o servo motor MG995 foi usado na direção de giro.
Produção de controlador
Fiz uma caixa de controle com uma impressora 3D.
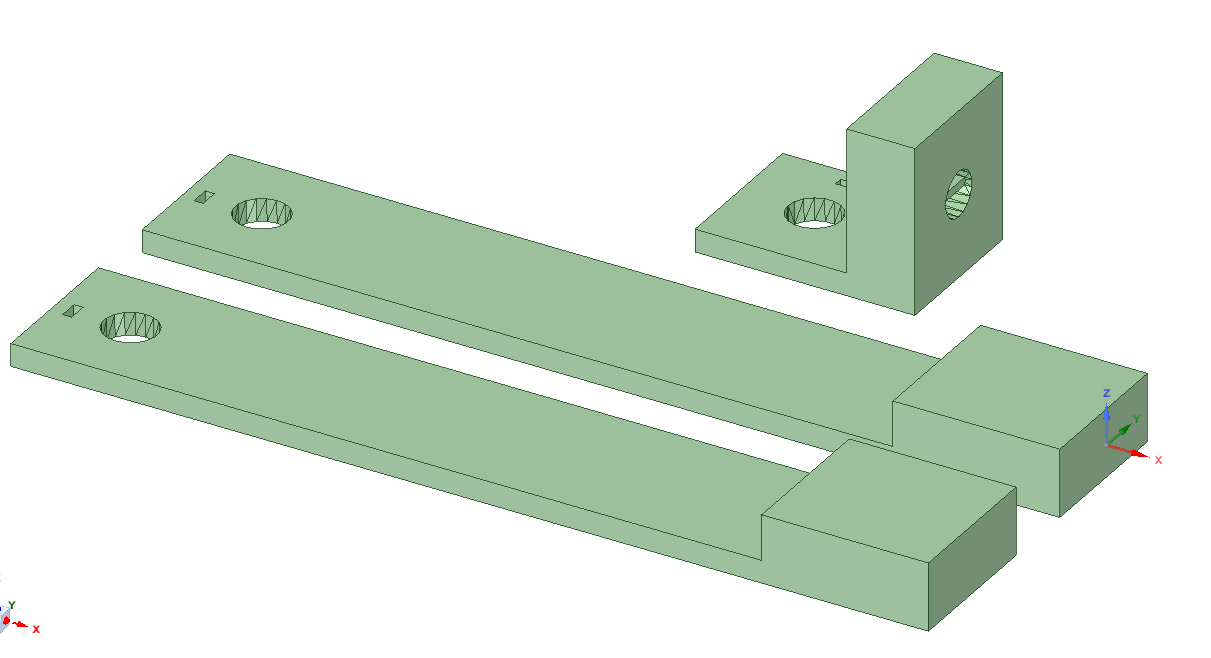
São fornecidos um orifício e um orifício de posicionamento para aparafusar através do botão do potenciômetro rotativo e um entalhe para inserir o botão.

Monte as peças fabricadas e três potenciômetros rotativos para concluir!
O potenciômetro giratório agora foi colocado na mesma direção do eixo de rotação do servomotor do braço do robô!
Código Arduino
Este código simples simplesmente lê o valor do potenciômetro rotativo com um pino analógico, converte-o em um ângulo e o insere no servo correspondente.
#include
Servo myservo1, myservo2, myservo3;
float th1 =90.0, th2 =90.0, th3 =90.0;
float val1, val2, val3;
void setup () {
Serial.begin (9600);
myservo1.attach (9, 500, 2420); // MG995
myservo2.attach (10, 820, 2140); // DS3115
myservo3.attach (11, 820, 2140); // DS3115
set_servo ();
}
void loop () {
val1 =analogRead (A1);
val2 =analogRead (A2);
val3 =analogRead (A3);
th1 =map (val1, 170,0, 880,0, 0,0, 180,0);
if (th1> =180,0) {
th1 =180,0;
} else if (th1 <=0,0) {
th1 =0,0;
}
th2 =map (val2, 150,0, 860,0, 0,0, 180,0);
if (th2> =180,0) {
th2 =180,0;
} else if (th2 <=0,0) {
th2 =0,0;
}
th3 =map (val3, 860,0, 160,0, 0,0, 180,0);
if (th3> =180,0) {
th3 =180,0;
} else if (th3 <=45.0) {
th3 =45.0;
}
set_servo ();
}
void set_servo ( ) {
myservo1.write (th1);
myservo2.write (th2);
myservo3.write (th3);
}
Operação
Conclua ligando o potenciômetro rotativo e conectando-o ao Arduino!
Peças personalizadas e gabinetes
Processo de manufatura
- Um robô móvel com prevenção de obstáculos baseada na visão
- Robô controlado pela Web Raspberry Pi com vídeo
- Robô Pi Simples
- Robô SCARA de braço duplo
- Desinfecção do robô com luz ultravioleta
- Unopad - Controlador Arduino MIDI com Ableton
- Braço do robô MeArm - Seu robô - V1.0
- Centro de giro equipado com braço robótico
- Robot combina braço robótico colaborativo com plataforma móvel
- Servo Motion melhora as operações do robô