


O que está impedindo a integração do robô industrial de volta?
A integração de robôs industriais é um processo altamente especializado, altamente criativo e astuto, enquanto as pessoas que a praticam costumam ser um crédito à própria ideia da engenhosidade e recursos humanos em si. De muitas maneiras, os integradores de robótica representam um corpo de arquitetos de soluções altamente especializados e capazes que ajudam os fabricantes a aumentar sua produtividade.
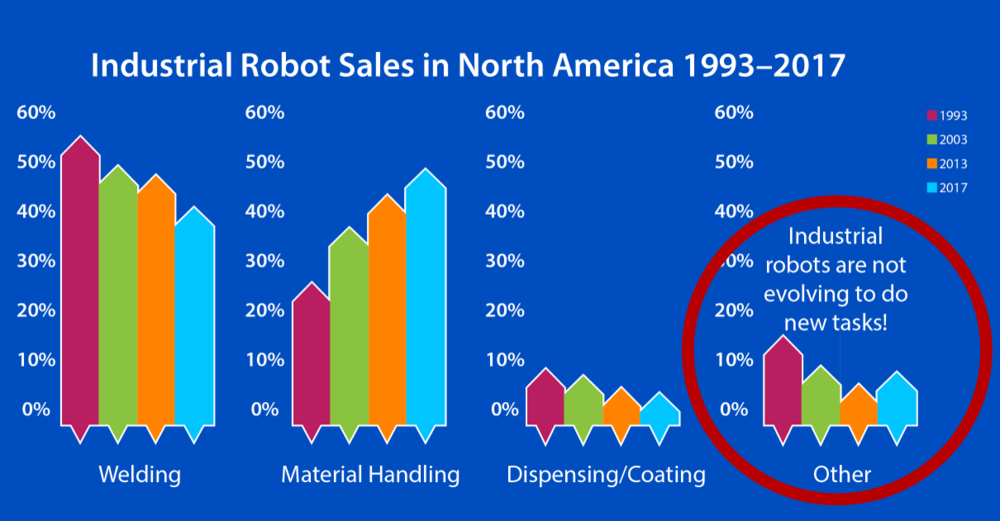
Infelizmente, existem algumas coisas segurando o alcance e escopo de integração do robô industrial de volta. Além disso, são os experientes e verdadeiros artesãos - os integradores de robótica em quem confiamos - que mais sofrem por isso. Não apenas porque é difícil encontrar pessoas com as habilidades certas para integração robótica, mas também porque o trabalho em si pode ser exigente, tedioso e ter retorno limitado em muitos cenários de manufatura.
O que há na robótica que os está impedindo? Bem, para começar, a programação é um processo tão exigente que os esforços para torná-lo mais fácil não tiveram o impacto material que deveriam para muitos integradores. Mesmo onde a programação é mais fácil, os robôs hoje não são construídos para se adaptar a uma grande variedade de peças ou ambientes não estruturados, o que efetivamente os mantém fora de muitas fábricas. Visão 3D, fusão de sensores e uma variedade de tecnologias prometem tornar os robôs mais autônomos, mas as habilidades e o software certos ainda não estão lá para tornar as coisas fáceis o suficiente ainda.
Felizmente, as soluções certas podem ajudar os integradores de robôs a finalmente resolver todos esses problemas de uma vez. Quando o fizerem, eles abrirão as portas para uma variedade de setores, processos e oportunidades de serviço que simplesmente não eram possíveis no passado.
Tornar a programação mais fácil não a tornou suficientemente fácil
O próprio conceito de robótica, em relação a outras práticas da engenharia moderna, ainda está um tanto confinado ao território da ficção científica. Como alguém pode automatizar de forma confiável um processo cem, mil ou até um milhão de vezes sem o risco de paralisação, paralisação ou deficiência catastrófica?
Os robôs industriais fornecidos hoje - seja da FANUC, Kuka, ABB, Kawasaki, Universal Robots ou mais fornecedores emergentes e de nicho - geralmente atendem a esses tipos de padrões de desempenho, onde, é claro, suas restrições de processo e requisitos de manutenção são respeitados.
Os avanços nos materiais tornaram ainda mais os robôs de cada um desses fornecedores de alto nível mais leves, mais ágeis e mais precisos do que jamais poderíamos esperar de trabalhadores humanos. Isso permitiu que diferentes empurrões, capacidades de motorista e muito mais fossem desenvolvidos por cada um.
Em todos esses casos, as escolhas essenciais de desenvolvimento e engenharia foram feitas para atingir os recursos e os níveis necessários de usabilidade. Embora esse processo seja trabalhoso, ele também cria uma divergência nas capacidades, programação e adequação de diferentes robôs para diferentes operações. Os integradores de robôs especialistas sabem como gerenciar modelos e trabalhar em cenários preferidos, mas quando se trata de escassez de habilidades e ambientes para implantar - onde eles poderiam de outra forma crescer e diversificar seus negócios - esta mistura de requisitos de programação de robôs pode parecer estar no caminho.

Nesta violação, um middleware unificador pode ser considerado por alguns como a principal maneira pela qual todos os diferentes tipos e funções de robô podem ser “harmonizados” a fim de simplificar o planejamento e a programação das operações do robô.
ROS (ou, criativamente, “Robot Operating System”) foi lançado em 2007 para conseguir isso. O ROS pelo menos forneceu um sistema que foi útil para acadêmicos no desenvolvimento e compartilhamento de aplicativos de robôs. Infelizmente, isso em última análise não resolveu o problema que os integradores industriais precisavam ser resolvidos:a capacidade de pular fundamentalmente muitas das limitações que vêm com o planejamento, programação e processamento em várias partes e restrições espaciais. Em vez disso, tudo isso poderia permitir que eles incorporassem, integrassem e vendessem mais robôs em novos processos e indústrias.
A necessidade de execuções de peças limitadas ou mínimas
Em última análise, um middleware de robô não acelera fundamentalmente a integração do robô porque o "ciclo permanece aberto" - com cada produto, processo e programa que um robô assume, cada etapa deve ser programada, testada e validada em um conjunto de cenários 100% previsíveis . Em última análise, isso significa que, não importa o quão incremental ou assistencial seja um cenário, levará a mesma quantidade de tempo para preparar o seu processo robótico mais importante. Mesmo se você tornar a programação mais fácil, um processo que requer repetição constante, não é fácil o suficiente.
Embora alguns fornecedores de robôs industriais anunciem linguagens e metodologias de programação mais fáceis - incluindo o aumento do uso de IHMs (interfaces homem-máquina) - cada processo ainda deve ser programado manualmente em algum grau. Esse programa, como gerado por um ser humano, deve ser validado. Isso significa que apenas uma quantidade limitada de tempo pode ser economizada no processo de integração da robótica.
Por exemplo, há uma tendência crescente entre as oficinas de máquinas de usar robôs com programação pessoal limitada para um processo repetível. Esse processo permitirá que uma execução de algumas centenas de peças de metal, por exemplo, seja rapidamente automatizada com um grau decente de precisão, mas, em última análise, ainda requer uma quantidade significativa de esforço humano, supervisão e retrabalho.
Embora isso possa ser considerado para realizar grande parte do “trabalho braçal”, ele apenas adiciona um grau limitado de produtividade a uma determinada loja e, além disso, apresenta oportunidades limitadas para integradores de robôs crescerem vendendo serviços em novos ambientes de clientes. Ao mesmo tempo, não resolve o problema da troca do robô entre as peças ou em ambientes não estruturados, ou simplesmente aqueles que não envolvem jigging extensivo.
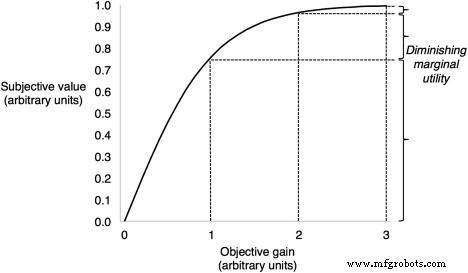
No final das contas, isso ainda é vítima da lei de “Utilidade Marginal Diminutiva”. Para fabricantes de massa, a utilidade marginal dos robôs é relativamente alta. Para oficinas de máquinas, agora é mais alto do que costumava ser, mas ainda é muito baixo para oferecer uma base de clientes confiável para integradores de robótica. Para fabricantes de alto mix - aqueles com milhares de SKUs e que compõem a maior parte da indústria de manufatura - a utilidade marginal dos robôs é tão baixa que poucos, se houver, fazem uso regular da robótica.
Nesses casos, os robôs precisam ser capazes de responder às peças e ambientes da maneira mais próxima possível de “tempo real”. Novos avanços na visão 3D representam uma oportunidade para os integradores de robótica darem aos robôs esses sentidos e, em última análise, superar seus desafios de programação de uma vez por todas - se, é claro, os robôs puderem ter a capacidade de se programarem.
Capacidades limitadas de detecção e visão
Quase na mesma época em que o ROS estava em sua infância, uma maneira totalmente nova de abordar a visão 3D estava sendo desenvolvida. Sensor Fusion - inicialmente desenvolvido para ambientes virtuais 3D como o que foi realizado com o sistema Xbox Kinect da Microsoft - permitiu renderização relativamente precisa de objetos e ambientes de maneiras que um computador poderia entender.
Alguns anos mais tarde, a fusão de sensores é integrada a carros autônomos e robôs móveis autônomos, encontrando ainda mais usos nos sistemas de realidade virtual que os originaram. O conceito - ao invés de sensores puramente visuais - tem raízes no Sistema de Posicionamento Global (GPS) enquanto também encontra tração relativa em tudo, desde monitoramento de HVAC a dispositivos médicos.
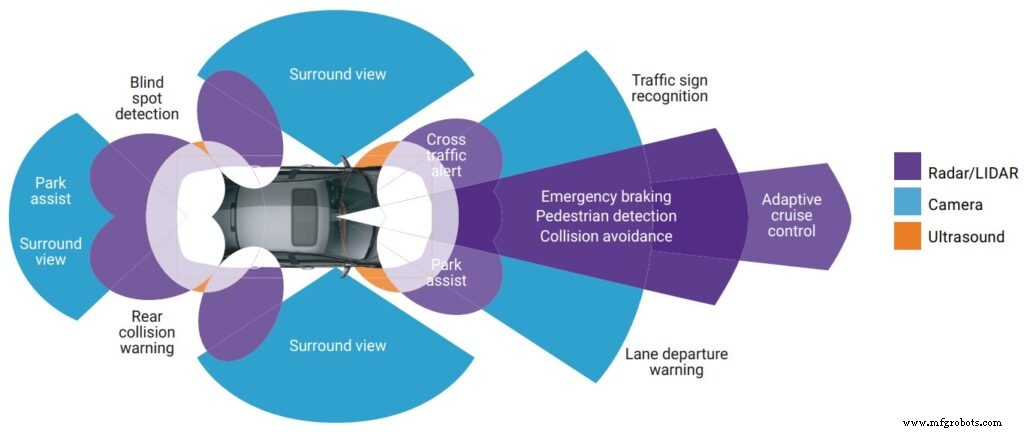
Para fabricantes industriais, entretanto, a fusão de sensores está apenas começando como uma aplicação útil. Enquanto muitos estão navegando na onda da Indústria 4.0 / IoT e tentando integrar sensores em mais lugares para conseguir monitoramento remoto, casos de uso de processamento de borda ou manutenção preditiva, incorporar visão de máquina e robótica é realmente a melhor maneira que eles podem algum tipo de resposta a seus robôs em processos industriais. Ao dar aos robôs a capacidade de identificar e processar objetos no espaço, eles podem trazer a mesma autonomia que vem com a tecnologia de carros autônomos para os robôs de suas fábricas.
Algumas dessas aplicações existem hoje, mas apenas para cenários altamente refinados ou kits de desenvolvimento de sensores prontos para uso que vêm dos principais fabricantes de robôs industriais e equipamentos periféricos. Eles oferecem um excelente ponto de partida para a integração de mais robôs em ambientes complexos, mas se limitam principalmente a escolher casos de uso e não a processos de valor agregado, onde gargalos de produção são mais comuns. Em última análise, até que um robô tenha a capacidade de gerar um programa por si mesmo a partir do que vê, ele oferecerá apenas melhorias incrementais em ambientes de alta combinação.
Facilitando a entrada em novos setores
Como um integrador de robótica, você pode não ter realmente tempo para gerar novas soluções incorporando visão 3D, fusão de sensores ou tipos novos e mais elaborados de ofertas de alta combinação. Muitos podem estar bastante satisfeitos com seus negócios na indústria automotiva e similares. Muitos mais podem ficar felizes entrando lentamente em mais oficinas de máquinas e operações de alta mistura onde o tamanho do lote é grande o suficiente para justificar uma solução robótica.
No entanto, para integradores que estão procurando uma maneira de implantar mais soluções de robótica em indústrias que ainda não as viram e não sabem por onde começar, a tecnologia Shape-to-Motion ™ da Omnirobotic pode oferecer uma maneira. Esta tecnologia VÊ, PLANEIA e EXECUTA processos de pulverização industrial identificando objetos de acordo com a forma - qualquer que seja seu posicionamento no espaço - usando visão 3D e, em seguida, usa IA e conhecimento de processo para gerar um movimento de robô exclusivo para cada peça sendo processada. Ele pode então executar o processo com um alto grau de refinamento, qualidade e produtividade aumentada, trabalhando com os drivers de movimento de robôs industriais existentes.
Em última análise, esta tecnologia permite que os integradores de robótica lidem com a implementação em cenários de alta combinação, seja aeroespacial, equipamentos pesados, móveis e eletrodomésticos principais. Estes são apenas alguns - mas não todos - dos cenários em que as aplicações de revestimento podem se beneficiar de operações robóticas mais aprimoradas e precisas e, ainda assim, simplesmente tiveram muitos tipos de peças para justificar o tempo de programação exigido de qualquer uma das soluções de programação manual de hoje.
Omnirobotic fornece tecnologia de autoprogramação para robôs que lhes permite ver, planejar e executar processos críticos de acabamento e pulverização industrial. A equipe da Omnirobotic combina décadas de experiência com novos recursos de IA para fornecer isso por meio de algo chamado Tecnologia Shape-to-Motion ™, que gera movimentos de robô exclusivos em tempo real para cada peça e requisito específico. Veja que tipo de retorno você pode obter com isso aqui .
Robô industrial
- Quais robôs de pintura industrial funcionam melhor?
- Robô Industrial
- Robôs Articulados:Guia para o Robô Industrial Mais Familiar
- Tipos de robôs industriais e seus diferentes usos
- As 12 principais aplicações e usos de robôs industriais
- Manutenção preventiva para robôs industriais
- 6 etapas para uma integração bem-sucedida do robô industrial em suas instalações
- Robôs Industriais na Indústria Automotiva
- Equipando Robôs Industriais para Ambientes Extremos de Armazém
- Os 3 principais mitos sobre a integração robótica industrial