


Evolução da área de contato com carga normal para superfícies rugosas:de escalas atômicas a macroscópicas
Resumo
A evolução da área de contato com carga normal para superfícies rugosas tem grande importância fundamental e prática, variando da dinâmica do terremoto ao desgaste da máquina. Este trabalho preenche a lacuna entre a escala atômica e a escala macroscópica para o comportamento de contato normal. A área de contato real, que é formada por um grande conjunto de contatos discretos (clusters), provou ser muito menor do que a área de superfície aparente. A distribuição dos agrupamentos de contato discretos e a interação entre eles são a chave para revelar o mecanismo dos sólidos em contato. Para este fim, a dinâmica molecular da função de Green (GFMD) é usada para estudar como o cluster de contato evolui da escala atômica para a escala macroscópica e a interação entre os clusters. Verifica-se que a interação entre os clusters tem forte efeito na sua formação. A formação e distribuição dos aglomerados de contato são muito mais complicadas do que as previstas pelo modelo de aspereza. A ignorância da interação entre eles leva a superestimar a força de contato. No contato real, os aglomerados de contato são menores e mais discretos devido à interação entre as asperezas. Compreender a natureza exata da área de contato com a carga normal é essencial para as pesquisas a seguir sobre fricção.
Histórico
A maioria das superfícies macroscópicas são consideradas rugosas e fractais [1, 2]. O comportamento de contato entre superfícies rugosas é muito mais complicado do que em superfícies perfeitamente lisas [3, 4]. A área de contato real é formada por um grande conjunto de regiões de contato discretas (clusters), que é muito menor do que a área de superfície aparente. A força normal e o tamanho, forma e distribuição dos aglomerados de contato são fundamentais para revelar o comportamento do contato, que é essencial para os seguintes estudos sobre fricção [5,6,7].
Para obter a relação entre a área de contato e a carga, vários modelos foram propostos desde a década de 1960 [1, 8,9,10,11,12,13,14]. Dentre eles, o modelo de aspereza é o mais simples e popular. Em uma das primeiras aplicações do modelo de aspereza, Greenwood e Williamson [8] descrevem a rugosidade da interface de contato assumindo que as asperezas têm os mesmos raios, mas alturas diferentes. Desde então, o modelo de aspereza tem prevalecido e uma vasta literatura tem surgido neste campo. Whitehouse e Archard [15] desenvolveram o modelo de Greenwood e Williamson (G-W) considerando os raios de curvatura aleatórios das pontas de aspereza. Nayak [16,17,18] introduziu as técnicas da teoria do processo aleatório [19, 20] na análise da rugosidade gaussiana, que foi posteriormente usada por Bush et al. [9] em contato de superfície rugosa.
Uma das suposições básicas no modelo de aspereza é que a interação entre as asperezas pode ser desprezada, o que indica que as asperezas de contato potenciais podem ser determinadas pela geometria da superfície com antecedência. No entanto, esta suposição pode levar a estimativas imprecisas da força de contato e da área de contato. Para obter a evolução dos clusters em contato e a interação entre eles, utilizamos a dinâmica molecular da função de Green (GFMD) [21,22,23] para estudar a superfície rugosa do fractal.
Este trabalho visa preencher a lacuna entre a escala atômica e a escala macroscópica para o comportamento de contato normal. A evolução da área de contato de escalas atômicas para macroscópicas é demonstrada através de exemplos numéricos com a consideração das interações de aspereza. Na discussão subsequente, primeiro apresentamos brevemente nossas abordagens para a geração de superfície fractal, o modelo GFMD, o algoritmo de detecção de agrupamento por contato e o projeto experimental numérico. Em seguida, focamos na formação e desenvolvimento do cluster de contato e na influência desses processos nos comportamentos da interface.
Métodos
Geração de superfície fractal rugosa
Para estudar o comportamento de contato da superfície rugosa, precisamos gerar a superfície para o modelo numérico. Vários algoritmos têm sido usados para superfícies fractais [24]. Neste trabalho, usamos o método da transformada de Fourier para gerar as superfícies rugosas do fractal, conforme mostrado na Figura 1. Quatro parâmetros são necessários para determinar a geometria da superfície rugosa do fractal. Estas são as frequências máximas ( w H ), a frequência mínima ( w L ), o expoente de Hurst ( H ), e o desvio padrão da amplitude ( P ) Os parâmetros estatísticos básicos da superfície, como RMS (root mean square) altura \ (\ left (\ sqrt {M_0} \ right) \), inclinação RMS \ (\ left (\ sqrt {M_2} \ right) \) , e curvatura RMS \ (\ left (\ sqrt {M_4} \ right) \), são os parâmetros chave para os comportamentos da interface, onde M i é o i º momento radial do espectro de superfície [19, 20]. É importante notar que o parâmetro estatístico de superfície M i está relacionado aos parâmetros estatísticos do perfil m i pela seguinte equação:\ ({M} _0 ={m} _0, {M} _2 =2 {m} _2, {M} _4 =\ frac {4} {3} {m} _4 \). É bem conhecido que a densidade de aspereza n (cumes de superfície ou vales) podem ser determinados pela seguinte equação:
$$ n =\ frac {1} {6 \ pi \ sqrt {3}} \ left ({m} _4 / {m} _2 \ right) $$ (1)
O modelo GFMD em diferentes escalas, da escala atômica à escala macroscópica (em σ )
Além disso, a superfície total do cume / número do vale N é expresso por
$$ N ={A} _0 \ times n ={A} _0 \ frac {1} {6 \ pi \ sqrt {3}} \ left ({m} _4 / {m} _2 \ right) $$ (2 )
onde A 0 é a área de superfície aparente. Para a superfície do fractal autoafim, os parâmetros estatísticos da superfície estão relacionados aos parâmetros de entrada ( w , H , P ) pela seguinte equação:
$$ {m} _i ={\ int} _ {w_L} ^ {w_H} {\ omega} ^ i {\ varPhi} _ {\ phi} \ left (\ omega \ right) d \ omega ={\ int} _ {w_L} ^ {w_H} {\ omega} ^ iB {\ omega} ^ {- \ left (1 + 2H \ right)} d \ omega $$ (3)
onde B é a constante de rugosidade da superfície, que está relacionada com P . As equações (3) e (2) indicam que o número do cume / vale da superfície do fractal depende do comprimento de onda e do expoente de Hurst. Discussões detalhadas das propriedades estatísticas da superfície fractal podem ser encontradas na literatura [25, 26].
No algoritmo da transformada de Fourier, como um exemplo típico, definimos o componente de Hurst como H =0,5, a frequência máxima deve ser w L =1 / (24 σ ), a frequência mínima deve ser w H =1 / (256 σ ), o desvio padrão da amplitude da frequência deve ser P =0,69, e o tamanho do sistema de 512 × 512 átomos (com espaçamento inicial igual a 1,12 σ ) Esses parâmetros de entrada subsequentemente geram a superfície com os seguintes parâmetros estatísticos:inclinação RMS da superfície \ (\ sqrt {M_2} =0,077 \) e curvatura RMS \ (\ sqrt {M_4} =0,0077 \) . O número total de picos / vales de superfície é 150 com base na Eq. (2), embora contando o número numericamente, o número do cume da superfície é 158 e o número do vale é 159. O erro está dentro de 5%, o que sugere que o tamanho do sistema é aceitável em um sentido estatístico. Na verdade, quando aumentamos o tamanho do sistema para 2048 × 2048 átomos (com espaçamento inicial igual a 1,12 σ ), os resultados dos parâmetros estatísticos são consistentes com os do sistema menor.
Modelo GFMD
A interação entre as partículas é muito difícil de capturar experimentalmente [6, 27]. Recentemente, a dinâmica molecular tem sido usada para simular a interação interpartículas, com o objetivo de investigar as origens moleculares do mecanismo de contato / fricção. No entanto, o gasto computacional é consideravelmente alto para simulações de dinâmica molecular em grande escala. Portanto, o GFMD é introduzido para simular a superfície devido à sua alta eficiência. O GFMD usa dinâmica molecular para simular a interação dos átomos da interface (duas camadas aqui), enquanto a camada sem interface, que geralmente exibe comportamentos elásticos, é simulada pela função de Green. Assim, ele reduz o grande sistema atômico a átomos de duas camadas na interface (como visto na Fig. 1), o que reduz drasticamente o gasto computacional. Discussões detalhadas sobre GFMD podem ser vistas na literatura [21,22,23, 28]. No modelo GFMD, o potencial de Lennard-Jones (LJ) é usado para simular a interação entre partículas. A equação é escrita como
$$ u (r) =4 \ varepsilon \ left [{\ left (\ frac {\ sigma} {r} \ right)} ^ {12} - {\ left (\ frac {\ sigma} {r} \ right )} ^ 6 \ right] $$ (4)
onde ε é a profundidade do poço potencial, σ é a distância finita na qual o potencial interpartícula é zero, e r é a distância entre as partículas. Pegamos ε , σ e ε / σ como a energia, unidade de distância e unidade de força, respectivamente. De acordo com o potencial LJ, sabemos que quando r =2 1/6 σ ≈ 1,12 σ , a força interpartícula é zero. Quando r > 1,12 σ , a força interpartícula é atrativa; quando r <1,12 σ , a força interpartícula é repulsiva. Uma vez que não consideramos a adesão neste trabalho, a distância de corte é definida como 1,12 σ . A estrutura cristalina usada para a camada atômica é cúbica centrada na face (FCC). Devido à simetria, pegamos apenas a camada da interface para formar a geometria da superfície, conforme mostrado na Fig. 1, e o bloco elástico abaixo da superfície plana é simulado pela função de Green.
Método de reconhecimento de cluster de contato
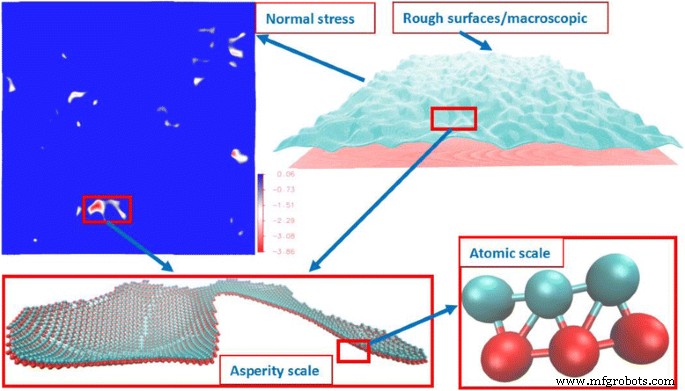
Existem três escalas observadas na interface, conforme visto na Fig. 1:(1) escala atômica, que é simulada pelo potencial LJ; (2) escala de aspereza, que é o efeito de grupo dos átomos de contato; e (3) escala macroscópica, que é o efeito de grupo dos agrupamentos de contato. O tamanho, forma, localização e distribuição dos aglomerados de contato são a ponte crítica entre o comportamento molecular e as propriedades da interface. Na nanoescala, a região de contato atômico é difícil de definir [6]. Definimos aqui um átomo de contato por sua força componente normal fz> 0. Subseqüentemente, os átomos em contato conectados são definidos como um agrupamento em contato. A técnica de rotulagem [29, 30] é usada para pesquisar o cluster de contato. Aqui, usamos um algoritmo modificado para aceleração, que evita o processo de busca recursiva. O fluxograma do algoritmo é mostrado na Fig. 2, onde os dados da força atômica são extraídos da simulação de dinâmica molecular da função de Green. O algoritmo é dividido em oito etapas principais, conforme a seguir.
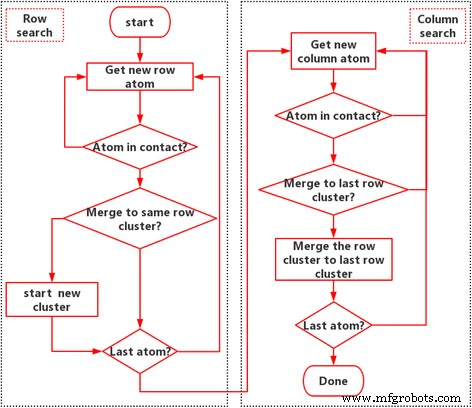
Algoritmo de detecção de cluster de contato:a técnica de rotulagem
Etapa 1. Inicie a pesquisa de linha e obtenha os novos dados do átomo, ou seja, pesquise os átomos de linha em linha.
Etapa 2. Determine se o átomo está em contato. Se não estiver em contato, volte para a etapa 1. Se não estiver em contato, vá para a próxima etapa.
Etapa 3. Compare o átomo atual com o átomo anterior na mesma linha. Se o átomo anterior também estiver em contato, funda o átomo no aglomerado ao qual o átomo anterior pertence e, a seguir, rotule o átomo com o mesmo número do átomo anterior. Se o átomo anterior não estiver em contato, rotule o átomo com um novo número que é o número anterior mais um.
Etapa 4. Determine se é o último átomo; caso contrário, volte para a etapa 1 ou vá para o processo de pesquisa de coluna.
Etapa 5. Inicie a pesquisa da coluna e obtenha os novos dados do átomo, ou seja, pesquise os átomos coluna a coluna.
Etapa 6. Determine se o átomo está em contato. Se não estiver em contato, volte para a etapa 5. Se não estiver em contato, vá para a próxima etapa.
Etapa 7. Compare o átomo atual com o átomo anterior na mesma coluna. Se o átomo anterior também está em contato e pertence a um cluster diferente, funda o cluster atual no cluster ao qual o átomo anterior pertence, então rotule os átomos com o mesmo número e armazene-os. Se o átomo anterior não estiver em contato ou pertencer ao mesmo cluster, passe para a próxima etapa.
Etapa 8. Determine se o átomo atual é o último átomo; caso contrário, volte para a etapa 5 ou o processo de pesquisa estará concluído.
Projeto Numérico Experimental
É bem conhecido que o problema de contato de duas superfícies rugosas pode ser simplificado como um problema com uma superfície rugosa rígida composta e uma superfície elástica plana, introduzindo o módulo de elasticidade equivalente E * , que é escrito como
$$ \ frac {1} {E ^ {\ ast}} =\ frac {1- {v} _1 ^ 2} {E_1} + \ frac {1- {v} _2 ^ 2} {E_2} $$ ( 5)
onde E 1 e E 2 são o módulo de elasticidade da superfície superior e da superfície inferior, respectivamente. Para simplificar, consideramos uma superfície rugosa rígida em contato com uma superfície lisa elástica e, a seguir, estudamos a formação e o desenvolvimento do aglomerado de contato e seu comportamento de força-área. Na discussão a seguir, usaremos a superfície gerada acima (a superfície superior é rígida e áspera ( E 1 =∞), e a superfície inferior é lisa e elástica ( E 2 =3 ε / σ 3 )) para estudar o comportamento de contato, onde ambos de v 1 e v 2 são definidos como 0,5. O tamanho do nosso sistema é 512 × 512 átomos (com espaçamento inicial igual a 1,12 σ ), e as condições de contorno periódicas são usadas no x - y avião. A profundidade do bloco elástico é definida como 1024 camadas atômicas (com espaçamento inicial igual a 1,12 σ ) Em uma simulação de dinâmica molecular regular, o sistema será composto de 268.697.600 átomos; o modelo GFMD reduz o número para 524.288 (duas camadas de átomos), como visto na Fig. 1. Nós gradualmente empurramos a superfície rugosa (no topo) na superfície elástica plana. O carregamento da superfície rígida é controlado pelo deslocamento. Cada etapa de carregamento de deslocamento é definida como 0,01 σ , e o algoritmo GFMD atualizará a posição de cada átomo até que a força atômica atenda aos critérios de convergência L 1 -norm =0,01 ε / σ. O número máximo de iteração é definido como 50.000 para evitar um loop infinito.
Resultados e discussão
Entrando em contato com a distribuição e desenvolvimento de clusters
O modelo de aspereza considera a aspereza como esférica ou elíptica e não considera a interação entre as asperezas de contato. Neste trabalho, as asperezas utilizadas no modelo de aspereza são extraídas da superfície gerada acima. No modelo de aspereza, as asperezas de contato potenciais podem ser determinadas antecipadamente pela geometria da superfície com base em suas alturas; isto é, os cumes / vales superficiais formarão grupos de contato de acordo com suas alturas. Porém, na realidade, a aspereza tem um formato irregular, e geralmente, várias asperezas adjacentes podem se fundir em uma grande, conforme mostrado na Fig. 2. Observa-se que existem seis asperezas independentes no início, e como a força de contato aumenta, eles finalmente se fundem em um grande cluster de contato (Fig. 3). Isso sugere que a suposição de que a distância entre as asperezas é grande o suficiente para que as asperezas não afetem umas às outras pode levar a resultados imprecisos.
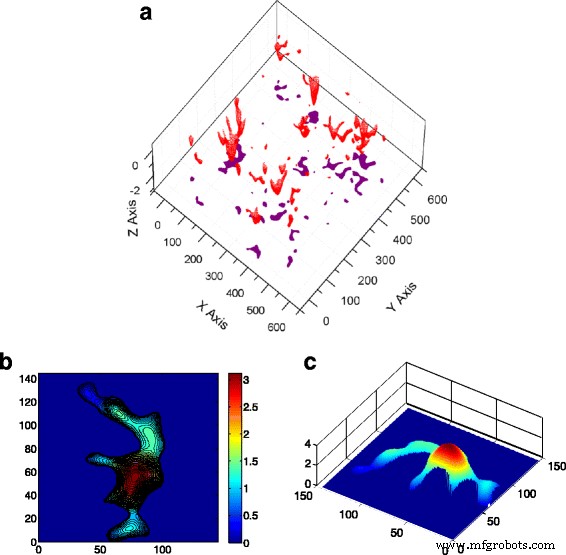
A forma dos clusters e o efeito de fusão. a A visualização 3D de clusters de contato e sua projeção no x - y plano (em σ ) b Um cluster de contato típico composto por seis asperezas independentes. c A visualização 3D da geometria do cluster de contato (em σ )
A Figura 4 demonstra que o número do cluster primeiro aumenta e depois diminui à medida que a área de contato aumenta, enquanto a aspereza da superfície sempre aumenta à medida que a área de contato aumenta. Isso se deve ao efeito de fusão explicado na Fig. 3.
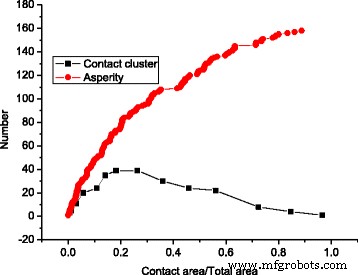
Vales de superfície e número de aglomerados sob diferentes áreas de contato
O efeito de fusão do cluster de contato foi observado tanto no modelo de aspereza quanto no modelo GFMD. Porém, com a mesma área de contato, o número de aglomerados de contato no modelo GFMD é muito maior do que no modelo de aspereza, como visto na Fig. 5. Observa-se que o número de aglomerados de contato no modelo GFMD é quase o dobro. no modelo de aspereza, conforme mostrado na Fig. 5. A principal razão para isso é que o modelo de aspereza não considera a interação inter-asperidade. No entanto, no modelo GFMD, os clusters de contato influenciam uns aos outros. Os campos de deslocamento gerados pelos aglomerados de contato são contínuos em toda a área da superfície. O deslocamento do grande conjunto de aglomerados resulta em uma nova geometria na superfície elástica, o que afeta a formação de novos aglomerados de contato. Portanto, a formação do cluster de contato não é apenas baseada na altura da superfície rugosa rígida, mas também pode ser influenciada por deformações na superfície elástica lisa. This can also be observed in Fig. 6, which shows the contact cluster distribution at different areas for the asperity model and GFMD model, respectively. As shown in Fig. 6, at a contact area of 5%, contact cluster numbers are 17 and 34 for the asperity model and the GFMD model, respectively, while at a contact area of 10%, their contact cluster numbers become 24 and 52, respectively. This suggests that the contact clusters in GFMD model are more discrete than those in the asperity model. In the GFMD model, the average cluster size is smaller, but most of the clusters will coincide with the summits/valleys, as can be observed in Fig. 7. Furthermore, the asperity model considers either the valleys or the summits as potential asperities (depending on which side is in contact). However, in Fig. 8, we found that as the contact area increases, both of the summits and the valleys can be in contact. In Fig. 8, most asperities in contact are the surface valleys when the contact area is small. However, when the contact area is larger than 10% of the surface area, more and more summits can also form as the contact clusters.

The cluster development for different models

The cluster distribution contour (in σ ) at different contact areas for the asperity model and GFMD model, respectively. a Asperity model with 5% contact area. b Asperity model with 10% contact area. c GFMD model with 5% contact area. d GFMD model with 10% contact area

The locations of the contact clusters and the surface valleys at 10% contact area

The surface valley and summit numbers grow at different areas
Contact Area-Load Relationship
The force-area relationship under a normal load is essential to the contact behavior. In the earlier models, asperities are usually considered to be spherical and elliptical. However, real contact clusters are much more complicated. In this section, we compared three models’ contact force-area relationship:(1) the GFMD model; (2) the asperity model (marked as AM), in which the asperity is directly extracted from the surface before we use GFMD to push those asperities into the flat elastic surface (this ensures that there is no unexpected contact cluster formation during the contact); and (3) the Greenwood and Williamson model (marked as G-W), in which the asperity is converted to the equivalent sphere. The sphere radius is obtained by
$$ \frac{1}{R}=\frac{8}{3}{\left(\frac{m_4}{\pi}\right)}^{1/2} $$ (6)
For the GFMD model and the asperity model with asperities extracted exactly from the surface, the total forces in the interface can be obtained by summing each contact cluster’s forces extracted from GFMD. For the Greenwood and Williamson model, we use the Hertz theory for each asperity force (with the same material property used in the GFMD model), which means that the total force F can be expressed as
$$ F=\sum \limits_{i=1}^n{f}_i=\sum \limits_{i=1}^{\mathrm{N}}\frac{4}{3}{E}^{\ast }{R}^{1/2}{\left(d-{z}_i\right)}^{3/2} $$ (7)
onde Z i is the asperity height, d is the displacement applied at the rigid surface, and f is the asperity contact force based on the Hertz contact theory.
In Fig. 9, we compared the three models’ force-area relationships, which exhibit linear relations. It is observed that the total force in GFMD is much smaller than that of the asperity model and the G-W model. F in the asperity model is 1.80 times than that predicted by GFMD, and F in the G-W model is 1.54 times than that predicted by GFMD. This can be explained by the RMS slope of the contact clusters. It is known that the normal load is proportional to the RMS slope, that is, \( L\propto \sqrt{M_2} \). In the GFMD model, the contact area is composed of a greater number of clusters, whose penetrations are shallower than that of the asperity model. Since the asperity tip’s slope is smaller, the RMS slope for the contact cluster in the GFMD model is also smaller. Figure 10 shows the contact cluster’s RMS slopes for the three models. It can be seen that the contact clusters’ RMS slope in GFMD is less than that of surface RMS slope of 0.077, while both of the other two models’ contact cluster RMS slopes are larger than that of the surface RMS slope.

Relation of the contact area and load for different models

The contact clusters’ RMS slope with different contact areas for different models, where the surface RMS slope is 0.077
Conclusões
To find the evolution of the contact area from atomic scale to macroscopic scale, the rough fractal surface contact problem has been studied using the GFMD model. We defined the atomic contact by the existence of a force larger than zero and studied three different length scales in the same system. It is found that the inter-asperity interaction is essential to the forming of a contact cluster. Some clusters are close enough that they can merge into a big one. The real contact region is far more complicated than that predicted by surface geometry due to elastic deformation in the elastic smooth surface. Most of the contact cluster locations are coincident with the surface summits/valleys. However, the cluster’s size is smaller, and its formation is not determined by the surface asperity heights. As the contact area increases, both summits and valleys can form as contact clusters. In the GFMD model, the force is much smaller than that of the asperity model, while the contact cluster number in the GFMD model is much larger. The RMS slope of the contact clusters in the GFMD model is smaller than that of the asperity model, which explains why the asperity model leads to higher pressure. Our findings suggest that the real contact area cannot be predicted simply by the surface geometry. The actual contact area with the normal load is of importance for the following research on friction.
Matrizes de nanotubos de TiO2:fabricadas por modelo Soft-Hard e a dependência do tamanho do grão do desempenho de emissão de campo
Camadas ótimas de dopagem de silício de barreiras quânticas na sequência de crescimento, formando potencial de confinamento suave de oito períodos em 0,2Ga0,8N / GaN poços quânticos de azul LED…
Nanomateriais
- A evolução da tecnologia de impressão 3D da HP:do polímero ao metal AM
- A história por trás da evolução de M2M para IoE
- Repensando a Manufatura Inteligente para o Novo Normal
- MoS2 com Espessura Controlada para Evolução Eletrocatalítica de Hidrogênio
- Um biossensor eletroquímico de DNA altamente sensível do nanocompósito de ouro acrílico para a determinação do gênero do peixe aruanã
- Biossensor ultrassensível para a detecção de DNA de Vibrio cholerae com nanoesferas de composto de ácido poliestireno-co-acrílico
- Polímero poroso funcional à base de trifenilfosfina como um catalisador heterogêneo eficiente para a síntese de carbonatos cíclicos de CO2
- De CM para EMS para MSP:A Evolução de uma Indústria
- Preparando sua cadeia de suprimentos para o futuro para o novo normal
- A evolução do esmagamento de uvas para vinho