


Mapeamento Nanomecânico Quantitativo de Elastômero de Poliolefina em Nanoescala com Microscopia de Força Atômica
Resumo
Normalmente, espera-se que as nanoestruturas elastoméricas cumpram um papel mecânico explícito e, portanto, suas propriedades mecânicas são fundamentais para afetar o desempenho do material. Suas aplicações versáteis exigem um entendimento completo das propriedades mecânicas. Em particular, a resposta mecânica dependente do tempo de poliolefina de baixa densidade (LDPE) não foi totalmente elucidada. Aqui, utilizando o mapeamento nanomecânico quantitativo de ponta da PeakForce juntamente com o volume da força e o volume da força rápida, os módulos elásticos das amostras de LDPE foram avaliados de uma forma dependente do tempo. Especificamente, a frequência de aquisição foi modificada discretamente em quatro ordens de magnitude de 0,1 a 2 kHz. Os dados de força foram ajustados com um modelo linearizado de mecânica de contato DMT considerando a força de adesão à superfície. O módulo de Young aumentado foi descoberto com o aumento da frequência de aquisição. Foi medido 11,7 ± 5,2 MPa a 0,1 Hz e aumentou para 89,6 ± 17,3 MPa a 2 kHz. Além disso, o experimento de complacência de fluência mostrou que o módulo de elasticidade instantâneo E 1 , módulo de elasticidade retardado E 2 , viscosidade η , tempo de retardo τ foram 22,3 ± 3,5 MPa, 43,3 ± 4,8 MPa, 38,7 ± 5,6 MPa s e 0,89 ± 0,22 s, respectivamente. A sondagem local multiparamétrica e multifuncional de medição mecânica, juntamente com imagens de alta resolução espacial excepcional, abre novas oportunidades para o mapeamento nanomecânico quantitativo de polímeros moles e pode ser potencialmente estendido para sistemas biológicos.
Introdução
Com o rápido progresso das técnicas avançadas de polimerização, vem crescendo o interesse em morfologias de polímeros e sua avaliação mecânica [1]. Uma classe popular de polímeros são os elastômeros. Normalmente, espera-se que as nanoestruturas elastoméricas cumpram um papel mecânico explícito e, portanto, suas propriedades mecânicas são fundamentais para afetar o desempenho do material. Eles normalmente exibem heterogeneidades espaciais e temporais em suas propriedades. Como sua estrutura e propriedades em nanoescala estão ligadas a micro-contrapartes que finalmente levam a propriedades em massa não são totalmente compreendidas [2,3,4,5,6,7,8]. Suas aplicações versáteis exigem um entendimento completo das propriedades mecânicas. Elastômeros de poliolefina (PE) têm gerado grande interesse em uma série de pesquisas e campos industriais, como cabos de alta tensão [9], membrana de nanofibras [10], materiais reutilizáveis [11] e sistemas poliméricos imiscíveis [12]. Ele provou ser um sistema de polímero modelo eficaz e confiável para medição nanomecânica [13, 14]. Apesar de suas amplas aplicações, a medição do módulo de elasticidade do PE de baixa densidade (LDPE) permanece um desafio por várias razões [15]. Em primeiro lugar, eles são viscoelásticos, o que significa que suas respostas mecânicas são dependentes do tempo. Em segundo lugar, grandes forças de superfície complicam o processo de indentação. Em terceiro lugar, modelos robustos que descrevem fielmente a mecânica de contato são escassos. Vários estudos foram conduzidos usando indentação para medir as propriedades mecânicas do LDPE. Avanços notáveis foram alcançados para compreender o módulo de LDPE. Por exemplo, como a temperatura [16], o polietileno linear de baixa densidade [17], a mistura de nano-pó [18] afetam seu módulo de Young, foram relatados. No entanto, a maioria predominante desses estudos carece de alta resolução espacial e os resultados não podem satisfazer o crescente interesse na caracterização quantitativa em nanoescala. Muitos pesquisadores se voltaram para técnicas alternativas, como microscopia de força atômica (AFM) com base em medições de força [1, 15].
Logo após sua invenção em 1980, o AFM foi estabelecido para ser uma ferramenta poderosa para interrogar as propriedades mecânicas das amostras. Historicamente, o AFM é capaz de rastrear a mudança da deflexão vertical quando a posição do piezo Z é aumentada. As trajetórias de carga e descarga de força correspondentes são registradas (curva de deslocamento de força). A curva força-deslocamento é então processada para a curva força-distância, que é ajustada com diferentes modelos de mecânica de contato. Isso pode ser feito em uma medição de local único (rampa de força única) ou em uma forma de matriz de matriz, chamada de volume de força (FV). A aplicação da medição de força convencional é extremamente demorada devido à sua lenta taxa de amostragem, que é intrinsecamente limitada pelo instrumento. A taxa de aquisição lenta foi melhorada por um método recém-criado denominado volume de força rápida (FFV). Ele pode ser operado de 0,1 Hz a cerca de 200 Hz. O mecanismo de trabalho subjacente para FFV se baseia na suavização do sinal de acionamento triangular na transição, levando a um retorno rápido entre a abordagem e a retração. Apesar dos avanços técnicos sem precedentes, ainda há espaço para melhorias em termos de taxa de amostragem de força. O mapeamento nanomecânico quantitativo (PFQNM) baseado em rosqueamento PeakForce (PFT) é uma abordagem emergente que alavanca sua capacidade de imagem de alta resolução e mapeamento de propriedades mecânicas simultaneamente. O PFQNM complementa o volume de força regular, aumentando a velocidade de amostragem até 2 kHz. Portanto, PFQNM, o volume da força juntamente com o volume da força rápida perfazem quatro ordens de magnitude em termos de taxa de carga / descarga de força. As abordagens acima mencionadas são instrumentais em termos de medição do módulo de elasticidade, e. Módulo de Young. No entanto, eles fornecem pouco ou nenhum comportamento mecânico dinâmico da amostra. Felizmente, o AFM oferece outro recurso exclusivo que é chamado de experimento de conformidade de fluência [19]. Neste projeto, a sonda AFM é colocada em contato com a superfície da amostra com uma força de pré-carga. A sonda é então mantida imóvel com força aplicada fixa. Enquanto a tensão é constante, o material sofre fluência. O AFM monitora a mudança de indentação em função do tempo. Os dados adquiridos estão então sujeitos ao ajuste do modelo. Uma riqueza de informações sobre as propriedades mecânicas dinâmicas dos materiais pode ser extraída dessa medição. Se todas as técnicas acima mencionadas forem montadas juntas, elas são promissoras para investigar com eficácia as propriedades mecânicas dependentes do tempo para polímeros macios.
Além do mapeamento de força, o PFT é uma ferramenta excepcional [20] para imagens de topografia. No PFT, o piezoelétrico Z impulsiona todo o suporte da sonda para cima e para baixo em baixas frequências, normalmente na faixa de 0,5k – 2k Hz. Ele fornece controle fino superior da força, uma vez que fornece feedback direto sobre a deflexão vertical de um cantilever macio. A capacidade de controlar com sucesso a força máxima de interação ganhou seu nome como tapping PeakForce. Além disso, ele preserva a alta resolução e também a baixa invasividade. Essas características atraentes tornam o PFT uma técnica ideal em imagens de topografia de espécimes biológicos moles e amostras de polímeros. Por exemplo, o modo de batimento de força de pico foi aplicado com sucesso para investigar a força de adesão entre polímeros condutores [21] e o evento de biorreconhecimento de moléculas individuais [22]. Até o momento, o PFQNM ganhou amplo interesse na caracterização das propriedades mecânicas de uma ampla gama de materiais, incluindo pasta de cimento endurecido [23], células vivas [24], fibrilas amilóides [25], compósito de matriz polimérica [26,27,28] e uma variedade de polímeros [29]. Uma vez que a imagem da altura de alta resolução também é coletada, é conveniente correlacionar as propriedades mecânicas locais com a topografia da amostra em nanoescala.
Neste estudo, o módulo dependente do tempo de uma amostra de LDPE foi avaliado utilizando uma série de abordagens. Especificamente, a frequência de rampa é alterada discretamente de 0,1 a 2k Hz. Calibrações rigorosas são feitas e os dados são ajustados a um modelo de mecânica de contato Derjaguin-Muller-Toporov (DMT) adequado. O aumento do módulo de Young foi descoberto com o aumento da frequência de rampa. O experimento de complacência de fluência foi realizado para entender melhor o comportamento mecânico dinâmico do LDPE. Módulo de elasticidade instantâneo E 1 , módulo de elasticidade retardado E 2 , viscosidade η , e tempo de retardo τ foi extraído do ajuste de modelo sólido linear padrão (SLS). A medição mecânica multiparamétrica, bem como a imagem topográfica de alta resolução espacial sem precedentes, foi explorada com sucesso para o mapeamento nanomecânico quantitativo de polímeros moles, como LDPE, e pode ser potencialmente estendida a sistemas biológicos.
Materiais e métodos
Materiais
Um kit de amostra PeakForce QNM foi adquirido na Bruker Co. (Santa Bárbara, CA). Uma amostra de mistura de polímero, uma amostra de safira e uma amostra de verificação de ponta foram incluídas no kit. A amostra da mistura de polímero é composta por uma película fina de poliestireno (PS) misturado com poliolefina de baixa densidade (LDPE). As amostras foram montadas em discos de metal com fita dupla-face e utilizadas conforme recebidas. De acordo com a fabricação, uma mistura de PS e LDPE (copolímero de etileno-octeno) foi fundida por rotação sobre um substrato de silício, criando um filme com propriedades de material variáveis. As sondas RTESPA-150 foram adquiridas da Bruker Co. (Santa Bárbara, CA) com constante de mola nominal de 5 N / m. A parte traseira dos cantilevers da sonda foi revestida com uma fina camada de alumínio para aumentar a deflexão do laser.
Calibrações
Um modo ScanAsyst equipado com Dimension ICON AFM (Bruker Co., Santa Bárbara, CA) foi utilizado para conduzir calibrações e medições mecânicas. Calibrações na sensibilidade de deflexão do cantilever, constante da mola do cantilever e raio da ponta foram realizadas para rampa de força e volume de força. Três sondas do mesmo lote foram usadas neste estudo. Os protocolos de calibração foram os seguintes. A sensibilidade de deflexão do cantilever foi calibrada realizando uma rampa de força através da chamada abordagem de calibração de toque, na qual uma sonda RTESPA-150 foi colocada em uma superfície muito dura, neste caso a amostra de safira. A saída da rampa foi selecionada para Z. O tamanho da rampa foi mantido em 200 nm e o limite de disparo relativo foi fixado em 0,3 V acima do fundo da linha de base. Depois que uma curva de deslocamento piezoelétrico de força versus Z foi coletada, um par de linhas foi usado para definir a parte mais linear da região de contato. A sensibilidade de deflexão seria calibrada automaticamente e salva ao clicar em atualizar a sensibilidade de deflexão. A sensibilidade de deflexão medida foi 44,7 ± 4,2 nm / V ( n =3). Em seguida, a sintonia térmica foi realizada para adquirir o espectro de vibração do cantilever no ar livre devido à energia térmica. O pico da frequência de ressonância foi destacado e ajustado pelo software NanoScope em tempo real que foi fornecido pelo fabricante AFM (Bruker Co. Santa Bárbara, CA). Com base na teoria do teorema da equipartição,
$$ \ frac {1} {2} k _ {{\ text {B}}} T =\ frac {1} {2} kd ^ {2} $$ (1)
onde \ (k _ {{\ text {B}}} \) é a constante de Boltzmann, \ (T \) é a temperatura absoluta em Kelvin e \ (d \) é o valor quadrático médio da raiz da amplitude de vibração do cantilever. A constante da mola \ (k \) foi calculada de acordo, levando em consideração um fator de correção de 1,09. O raio da ponta foi estimado examinando cuidadosamente a sonda na amostra de verificação da ponta. A amostra é composta de titânio que possui extremidades pontiagudas em algumas regiões. Cada ponta afiada capturaria uma parte da forma da ponta. No final, a imagem topográfica da amostra poderia ser usada para reconstruir a forma da ponta, que se presumia ser uma esfera. Para estimar com precisão o raio da ponta, uma profundidade de indentação também era necessária. A profundidade de indentação (18,3 ± 2,6 nm, n =3) foi obtida medindo-se a distância entre a separação zero e o ponto mais baixo do salto no contato. O raio efetivo da ponta foi calibrado substituindo o valor de indentação na Altura 1 do ápice na imagem de verificação da ponta.
Sync Distance e PFT Amplitude Sensitivity são exclusivos da técnica PFQNM. Eles também precisam ser calibrados. A distância de sincronização é definida como uma constante de tempo em que o piezo Z atinge a posição mais baixa. A Sensibilidade de Amplitude PFT é conhecida como um fator de escala que transfere o sinal do drive de entrada digital para o deslocamento piezoelétrico Z fisicamente. Sua precisão garante que o piezo Z se mova conforme desejado. Ambos Sync Distance e PFT Amplitude Sensitivity foram calibrados na amostra de safira usando a abordagem de calibração por toque. Notavelmente, a distância de sincronização e a sensibilidade à amplitude PFT dependem da frequência. Ambos foram calibrados em frequências discretas. Neste trabalho, uma ampla faixa de frequências foi selecionada variando de 0,125k a 2k Hz.
Mapeamento Nanomecânico Quantitativo PFQNM
As sondas RTESPA-150 foram carregadas para mapeamento nanomecânico quantitativo da amostra de LDPE. As constantes calibradas da mola foram 3,9 ± 1,4 N / m (n =3). Durante a varredura, o usuário define o ponto de ajuste de força em 5 nN enquanto permite o controle automático do ScanAsyst para otimizar a taxa de aquisição de imagens (taxa de varredura), ganho de feedback e intervalo Z. O pixel digital foi mantido em 256 × 256 por imagem. A frequência de PFT foi variada de 2k a 0,125k Hz entre os experimentos para produzir carga e descarga de força dependente do tempo. Para amplitude de PFT de 100 nm na frequência de PFT de 2 kHz, a taxa de carga de força correspondente foi de 0,8 mm s −1 . O coeficiente de Poisson para LDPE viscoelástico foi assumido como 0,35 [13]. Uma região de pesquisa de 5 µm x 5 µm foi digitalizada simultaneamente com topografia e medições mecânicas. O controlador NanoScope tinha largura de banda suficiente para computar dados mecânicos e exibi-los em canais de software em tempo real. Esses dados foram salvos em imagens brutas para posterior análise offline. Portanto, uma série de canais de imagem foram capturados, incluindo sensor de altura, módulo DMT, mapa de adesão, indentação e canais de dissipação de energia. Uma vez que os componentes do LDPE e do poliestireno foram identificados. As medições de PFQNM de alta resolução espacial no LDPE foram realizadas em uma varredura de 0,5 µm x 0,5 µm.
AFM Force Ramp e Fast Force Volume
A rampa de força e o volume de força rápido foram alcançados aumentando o deslocamento piezoelétrico Z ao mesmo tempo que monitorava a deflexão vertical do cantilever. O tamanho da rampa era de 200 nm. O ponto de ajuste de baixa força de gatilho em 5 nN foi alcançado por um mecanismo de subtração de fundo constante que exclui a deriva de deflexão durante o processo de rampa. Uma matriz de amostragem de rampa de força foi definida em uma região de 0,5 µm x 0,5 µm. As taxas de rampa foram de 0,1 Hz, 1 Hz, 10 Hz, 20 Hz, 61 Hz e 122 Hz. Para taxa de rampa de 1 Hz e tamanho de rampa de 200 nm, a taxa de carga de força correspondente foi de 400 nm s −1 . Foram coletadas curvas de rampa de 16 x 16 para 0,1 Hz e 1 Hz, enquanto as curvas de rampa de 128 x 128 para 10 Hz, 20 Hz, 61 Hz e 122 Hz.
Experiência de deslocamento
O scanner Stargate foi calibrado por deriva para experimento de fluência. As sondas RTESPA-150 foram colocadas em contato com uma região de LDPE limpa da amostra PS / LDPE até que alcançassem uma carga de força predefinida de 2 nN. O recurso de controles de superfície do software NanoScope permitiu manter a sonda na amostra por determinado período de tempo, neste caso 5 s. Esse período foi denominado segmento de espera. A força aplicada foi mantida constante segurando a força de gatilho. Mil e vinte e quatro pontos de dados foram coletados para o segmento de espera. Foram adquiridos o sensor de altura em função do tempo e o erro de deflexão (força) em função do tempo. Pelo menos 50 curvas de fluência foram capturadas em locais selecionados aleatoriamente. Três experimentos independentes foram conduzidos. Um experimento de controle em branco foi realizado na amostra de safira. Como esperado, nenhuma mudança significativa em Z foi observada.
Configuração experimental
Para mapear quantitativamente as propriedades mecânicas da amostra de LDPE (Fig. 1), o experimento foi projetado de tal forma que uma ponta cantilever afiada recuou na amostra de LDPE e se retirou da superfície da amostra quando uma carga de força predefinida foi alcançada ( Fig. 1a). A força foi registrada detectando o sinal de deflexão vertical no fotodiodo sensível à posição (PSPD). O movimento do cantilever foi impulsionado pelo movimento Z piezo. Dependendo da escolha da técnica, o sinal de acionamento pode ser uma onda triangular (FV), uma onda triangular arredondada (FFV) ou um sinal de onda senoidal (PFQNM). O PFQNM foi desenhado esquematicamente na Fig. 1b, a curva força versus tempo demonstrou claramente que a ponta sofreu um contato instantâneo ao se aproximar da superfície da amostra e um estalo de contato ao se retrair da superfície da amostra. A distância de sincronização definiu o ponto de viragem que separou a curva de aproximação da curva de retração. Em uma superfície dura, esse ponto era uma constante de tempo em que o piezo Z atingiu a posição mais baixa. Também significava quando a força atingiu o pico de força. Em contraste, em uma amostra compatível com soft este ponto pode mudar um pouco devido à deformação da amostra dependente do tempo. Independentemente das técnicas adotadas, o AFM registrou a curva força versus deslocamento Z e foi posteriormente convertido na curva de separação força versus ponta-amostra (Fig. 1c). A parte de contato da curva de retração foi ajustada com um modelo DMT linearizado descrito abaixo e o módulo DMT foi extraído. A dissipação de energia foi calculada integrando o ciclo de histerese. Um cantiléver com uma constante de mola adequada foi escolhido com cautela para que a ponta do cantilever seja capaz de entrar na amostra, mas com sensibilidade de força suficiente. Por outro lado, o raio da ponta também precisa ser considerado porque a tensão aplicada também depende da área de contato. Em vista disso, as sondas RTESPA-150 foram selecionadas porque produzem a quantidade certa de força para recortar na amostra, mas preserva a alta sensibilidade à força ao mesmo tempo.
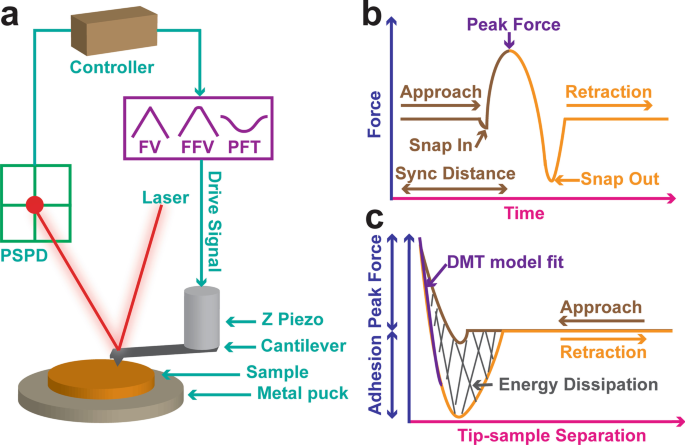
Mecanismo de rampa de força AFM, desenho experimental, aquisição e interpretação de dados. A amostra de LDPE foi montada em um disco de metal. Uma ponta cantilever afiada recuou na amostra de LDPE e retraiu quando uma força aplicada predefinida foi alcançada ( a ) Um laser brilhou no topo, atingiu e desviou na parte de trás do cantilever. O sinal de deflexão foi recebido por um fotodiodo sensível à posição (PSPD). O movimento do cantilever foi conduzido pelo piezo Z anexado. Dependendo da escolha da técnica, o sinal de acionamento pode ser uma onda triangular (FV), uma onda triangular arredondada (FFV) ou uma onda senoidal (PFQNM). A medição de força PFQNM foi esquematicamente representada em b O gráfico de força versus tempo ilustrou claramente que a ponta sofreu um contato de encaixe quando trazida para perto da superfície da amostra e um encaixe de contato quando retraída para longe da superfície da amostra. A distância de sincronização foi uma constante de tempo em que o sensor de altura atingiu a posição mais baixa. A curva força versus deslocamento Z (F-Z) foi registrada pelo AFM e posteriormente convertida na curva força versus separação ponta-amostra (F-D) ( c ) O módulo DMT foi extraído ajustando a parte de contato da curva de retração com o modelo DMT. A integração ao longo do ciclo de histerese foi referida como dissipação de energia
Análise de dados
A análise de dados offline foi conduzida com o software NanoScope Analysis (Bruker Co., Santa Bárbara, CA) fornecido pela fábrica AFM. Todas as imagens topográficas foram submetidas ao achatamento de primeira ordem, que elimina a deriva piezoelétrica Z, ruído de fundo e corrige a inclinação da amostra. A rugosidade da superfície foi avaliada pelo recurso de rugosidade da superfície fornecido pelo software NanoScope Analysis.
$$ R _ {{\ text {q}}} =\ sqrt {\ frac {{\ sum \ left ({Z _ {{\ text {i}}} - Z _ {{\ text {m}}}} \ right ) ^ {2}}} {N}} $$ (2)
onde \ (N \) é o número total de pontos dentro da área da imagem, \ (Z _ {{\ text {i}}} \) é a \ (Z \) altura do i o ponto de dados, e \ (Z _ {{\ text {m}}} \) é a altura \ (Z \) média de toda a área. Todas as imagens de dados mecânicos foram deixadas intactas sem nivelamento.
A rampa de força, o volume de força rápida e o PFQNM produziram curvas de força versus deslocamento piezo Z (F-Z). As curvas de força versus separação ponta-amostra (F-D) são mais significativas fisicamente e exigidas para o ajuste do modelo. O deslocamento Z consiste em três componentes, a saber, separação ponta-amostra ( D ), deflexão cantilever ( d ) e profundidade de indentação (\ (\ delta \)). A conversão de F-Z em F-D requer subtração da deflexão do cantilever ( d ) e profundidade de indentação (\ (\ delta \)) do deslocamento Z. Isso pode ser feito em um software de controle em tempo real ou por um software de análise de dados offline, desde que a sensibilidade de deflexão do cantilever e a constante da mola tenham sido calibradas. Além disso, a função de correção da linha de base foi executada para deslocar a linha de base da curva de força para zero. Finalmente, as curvas F-D foram obtidas e sujeitas ao ajuste do modelo DMT. De acordo com a teoria de contato Hertziana,
$$ F _ {{{\ text {appl}}}} =\ frac {4} {3} E_ {r} \ sqrt R \ delta ^ {{\ frac {3} {2}}} + F _ {{{ \ text {adh}}}} $$ (3)
onde \ (F _ {{{\ text {appl}}}} \) é a força que a ponta aplicada na amostra. A força de adesão (\ (F _ {{{\ text {adh}}}} \)) é levada em consideração. \ (R \) é o raio da ponta para a ponta esférica presumida. \ (\ delta \) é a profundidade de indentação. \ (E _ {{\ text {r}}} \) é o módulo de Young reduzido. Está relacionado aos módulos da ponta e da amostra,
$$ \ frac {1} {{E _ {{\ text {r}}}}} =\ left ({\ frac {{1 - v _ {{\ text {s}}} ^ {2}}} {{ E _ {{\ text {s}}}}}} \ right) + \ left ({\ frac {{1 - v _ {{\ text {t}}} ^ {2}}} {{E _ {{\ text {t}}}}}} \ right) $$ (4)
onde \ (v _ {{\ text {s}}} \) e \ (v _ {{\ text {t}}} \) são as razões de Poisson da amostra e a ponta de AFM, respectivamente. \ (E _ {{\ text {s}}} \) e \ (E _ {{\ text {t}}} \) são os módulos de Young da amostra e ponta de AFM, respectivamente. O módulo de Young da ponta é várias ordens de magnitude maior do que o da amostra de LDPE, então o termo da ponta pode ser negligenciado. Uma vez que \ (E _ {{\ text {r}}} \) e \ (v _ {{\ text {s}}} \) são conhecidos, \ (E _ {{\ text {s}}} \) pode ser prontamente calculado.
Pegando ambos os lados da Eq. (3) à potência \ (\ frac {2} {3} \) após subtrair o \ (F _ {{{\ text {adh}}}} \) de \ (F _ {{{\ text {appl}} }} \), um modelo linearizado foi empregado para ajustar todos os dados de força [30]. Este modelo não requer identificação do ponto de contato.
$$ \ left ({F _ {{{\ text {appl}}}} - F _ {{{\ text {adh}}}}} \ right) ^ {{\ frac {2} {3}}} =\ esquerda ({\ frac {4} {3} E _ {{\ text {r}}} \ sqrt R} \ direita) ^ {{\ frac {2} {3}}} \ delta $$ (5)
Então \ (E _ {{\ text {r}}} \) e \ (E _ {{\ text {s}}} \) foram extraídos como resultado.
$$ E _ {{\ text {r}}} =\ frac {3} {4} \ left ({\ frac {{\ left ({F _ {{{\ text {appl}}}} - F _ {{{ \ text {adh}}}}} \ right) ^ {{\ frac {2} {3}}}}} {\ delta}} \ right) ^ {{\ frac {3} {2}}} \ frac {1} {{\ sqrt R}} =\ frac {3} {4} \; {\ text {declive}} ^ {{\ frac {3} {2}}} \ frac {1} {{\ sqrt R}} $$ (6)
A força aplicada foi calculada a partir da lei de Hooke, uma vez que o cantilever agia como uma mola.
$$ F _ {{{\ text {appl}}}} =k \ vezes d $$ (7)
onde \ (k \) é a constante da mola do cantilever e \ (d \) é a deflexão do cantilever, que foi calculada multiplicando a sensibilidade da deflexão do cantilever pelo sinal de deflexão vertical.
Para a análise de conformidade de fluência, a versão Voigt do modelo SLS foi adotada [19]. Neste modelo de três elementos, uma mola ( E 1 ) está em série com uma mola ( E 2 ) -dashpot Voigt element em paralelo. A distância de compressão ( d ) em função do tempo pode ser descrito como:
$$ d (t) =\ frac {F} {{k_ {1}}} + \ frac {F} {{k_ {2}}} \ times \ left ({1 - {\ text {e}} ^ {{- \ frac {{tk_ {2}}} {\ eta}}}} \ right) $$ (8)
onde F é a força total de carga, k 1 e k 2 são a elasticidade de E 1 e E 2 , respectivamente. η representa a viscosidade do painel de controle. Uma vez que a área de interação ponta-amostra é uma área finita, não um único ponto. O modelo pode ser melhorado reescrevendo a equação em termos de tensão, deformação e módulo. O método desenvolvido por Lam e colegas foi adotado neste estudo. Sua equação análoga é:
$$ \ varejpsilon (t) =\ frac {\ sigma} {{E_ {1}}} + \ frac {\ sigma} {{E_ {2}}} \ times \ left ({1 - {\ text {e }} ^ {{- \ frac {{tE_ {2}}} {\ eta}}}} \ right) $$ (9)
onde ε ( t ) denota deformação como uma função de tempo, σ é o estresse. E 1 e E 2 são os módulos elásticos instantâneos e retardados, respectivamente. η representa a viscosidade do painel de controle. Além disso, estresse σ e estirar ε estão relacionados com o módulo E ou conformidade D pelo seguinte relacionamento.
$$ E =\ frac {\ sigma} {\ varejpsilon} =\ frac {1} {D} $$ (10)
A Equação (9) pode, portanto, ser reescrita como:
$$ D =\ frac {1} {E} =\ frac {1} {{E_ {1}}} + \ frac {1} {{E_ {2}}} \ times \ left ({1 - {\ texto {e}} ^ {{- \ frac {{tE_ {2}}} {\ eta}}}} \ right) $$ (11)
onde D e E denotam a complacência à fluência e o módulo de elasticidade combinado do sistema, respectivamente. Reescreva a Eq. (5) como
$$ \ delta =\ left ({\ frac {{3 \ left ({F _ {{{\ text {appl}}}} - F _ {{{\ text {adh}}}}} \ right)}} { {4 \ sqrt R E _ {{\ text {r}}}}}} \ right) ^ {{\ frac {2} {3}}} $$ (12)
Substituindo a Eq. (11) na Eq. (12) dá origem a
$$ \ delta \ left (t \ right) =\ left \ {{\ frac {{3 \ left ({F _ {{{\ text {appl}}}} - F _ {{{\ text {adh}}} }} \ right)}} {{4 \ sqrt R}} \ times \ left ({\ frac {1} {{E_ {1}}} + \ frac {1} {{E_ {2}}} \ times \ left ({1 - {\ text {e}} ^ {{- \ frac {{tE_ {2}}} {\ eta}}}} \ right)} \ right)} \ right \} ^ {{\ frac {2} {3}}} $$ (13)
Os dados de fluência podem ser ajustados à Eq. (13) e o tempo de retardo τ pode ser derivado usando
$$ \ tau =\ frac {\ eta} {{E_ {2}}} $$ (14)
O tempo de retardo é referido como o tempo em que ocorreu ~ 63% da fluência.
Todas as medidas de força foram repetidas três vezes. Os resultados foram relatados na forma de Média ± DP (desvio padrão), enquanto o número de experimentos independentes foi denotado como n =3.
Resultados
Para avaliar a eficácia e precisão do PFQNM, uma grande varredura de pesquisa com 5 µm × 5 µm foi realizada. Imagens representativas de PFQNM da amostra de mistura PS / LDPE a 2 kHz foram montadas na Fig. 2. A Figura 2a-d foram imagens do sensor de altura, canal de módulo DMT, canal de indentação e canal de dissipação de energia. A região plana foi o componente PS, enquanto a região saliente foi o LDPE (Fig. 2a). Na conclusão da varredura de pesquisa, o AFM foi instruído a aumentar fisicamente a região do LDPE e fazer uma varredura de tamanho pequeno de alta resolução (1,3 µm × 1,3 µm). Os canais de imagem correspondentes foram exibidos na Fig. 2e – h.
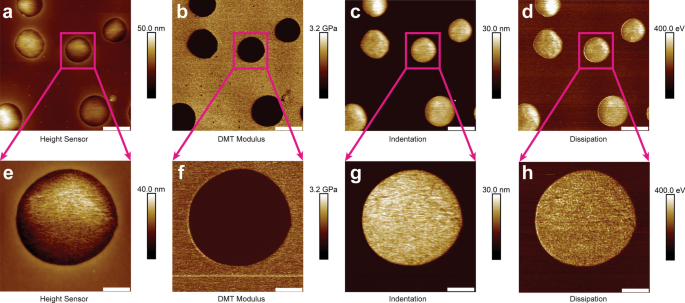
Mapeamento nanomecânico PFQNM representativo (5 µm × 5 µm) da amostra de mistura PS / LDPE a 2 kHz. Painéis a - d são a imagem do sensor de altura, o canal do módulo DMT, o canal de indentação e o canal de dissipação de energia. Para imagens a - d , as barras de escala representam 1 µm. Na conclusão da varredura de pesquisa, o AFM é guiado para aumentar fisicamente a região do LDPE e fazer uma varredura de tamanho pequeno de alta resolução (1,3 µm × 1,3 µm). Os canais de imagem correspondentes são exibidos nos painéis e – h . A barra de escala representa 260 nm para os painéis e - h
Em seguida, PFQNM, FV e FFV foram conduzidos sobre uma região de LDPE pura a 0,5 µm x 0,5 µm. Um conjunto representativo de PFQNM a 2 kHz foi coletado na Fig. 3a – d. Eles incluíram sensor de altura, mapeamento de módulo, dissipação de energia e indentação. A rugosidade da superfície da imagem do sensor de altura foi relatada na forma de \ (R _ {{\ text {q}}} \) como 2,58 ± 0,35 nm. Outro conjunto representativo de FFV em 122 Hz foi mostrado na Fig. 3e, f. Observe que não houve dissipação de energia e canais de indentação para FV e FFV. Os módulos elásticos em diferentes frequências foram agrupados (Fig. 3g). Os dados dos módulos de Young foram relatados na Tabela 1. Os módulos de Young a 0,1 Hz, 1 Hz, 10 Hz, 20 Hz, 61 Hz, 122 Hz, 125 Hz, 250 Hz, 500 Hz, 1 k Hz e 2 k Hz foram 11,7 ± 5,2 MPa ( n =3), 18,2 ± 5,6 MPa ( n =3), 25,4 ± 6,8 MPa ( n =3), 29,6 ± 8,4 MPa ( n =3), 33,8 ± 9,7 MPa ( n =3), 35,7 ± 10,5 MPa ( n =3), 43,8 ± 10,7 MPa ( n =3), 54,8 ± 11,9 MPa ( n =3), 66,7 ± 13,6 MPa ( n =3), 80,9 ± 14,2 MPa ( n =3), 89,6 ± 17,3 MPa ( n =3), respectivamente. O gráfico de dispersão foi gerado com o software Origin 8.5. Os dados foram ajustados com uma função de potência gerada \ (E =15,31 \ times f ^ {{0,23}} \) (\ (R ^ {2} \) =0,96). A relação entre a dissipação de energia e as diferentes frequências de mapeamento foi traçada na Fig. 3h. Os valores de dissipação de energia obtidos em 2 kHz, 1 kHz, 0,5 kHz, 0,25 kHz e 0,125 kHz foram 173,2 ± 21,9 eV ( n =3), 213,8 ± 32,7 eV ( n =3), 233,9 ± 29,3 eV ( n =3), 261,1 ± 33,5 eV ( n =3), 293,2 ± 35,6 eV ( n =3), respectivamente. Os dados foram ajustados com uma função de potência produzida \ (E _ {{{\ text {diss}}}} =202,83 \ times f ^ {{- 0,18}} ~ \) (\ (R ^ {2} \) =0,97 ) Uma curva F-D representativa mostrou duas rupturas distintas da ponta de AFM da superfície da amostra de LDPE (Fig. 3i). A ocorrência de múltiplas rupturas ocorreu com mais frequência em frequências mais baixas, ou seja, 0,1-1 Hz.
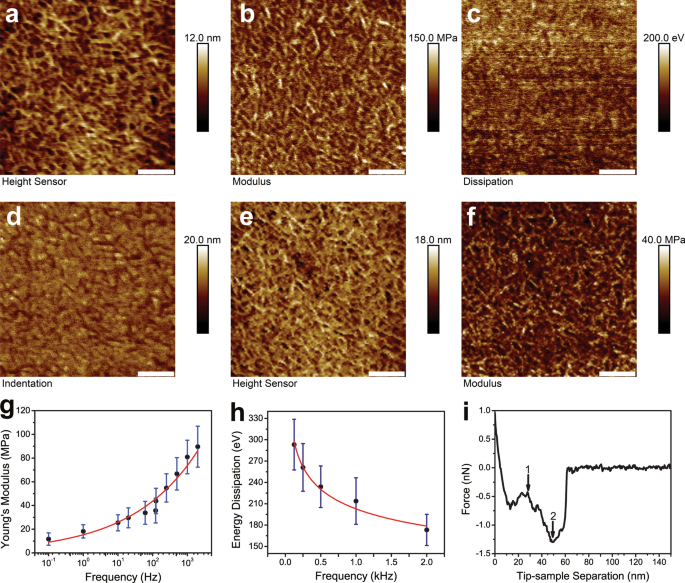
Propriedade mecânica da amostra de LDPE mapeada em diferentes frequências. Painéis a - d foram a imagem do sensor de altura, o canal do módulo DMT, a dissipação de energia e o canal de indentação capturados com PFQNM a 2 kHz na região limpa do LDPE. A rugosidade da superfície da imagem do sensor de altura foi relatada na forma de \ (R _ {{\ text {q}}} \) como 2,58 ± 0,35 nm. Os painéis e e f eram a imagem do sensor de altura e o canal do módulo DMT capturados com FFV a 122 Hz na região de LDPE limpa. Para imagens a - f , as barras de escala representaram 100 nm. Relação entre o módulo de Young medido ( E ) e a frequência de mapeamento de força ( f ) foi plotado em g . Os módulos de Young medidos em diferentes frequências foram tabulados na Tabela 1. Os dados foram ajustados com uma função de potência produzida \ (E =15,31 \ vezes f ^ {{0,23}} \) (\ (R ^ {2} \) =0,96 ) A relação entre dissipação de energia ( E desprezo ) e diferentes frequências de mapeamento ( f ) foi mostrado no painel h . Os valores de dissipação de energia obtidos a 2 kHz, 1 kHz, 0,5 kHz, 0,25 kHz e 0,125 kHz foram 173,2 ± 21,9 eV, 213,8 ± 32,7 eV, 233,9 ± 29,3 eV, 261,1 ± 33,5 eV, 293,2 ± 35,6 eV, respectivamente. Os dados foram ajustados com uma função de potência produzida \ (E _ {{{\ text {diss}}}} =202,83 \ times f ^ {{- 0,18}} ~ \) (\ (R ^ {2} \) =0,97 ) A representative F-D curve showed two distinct ruptures of AFM tip from LDPE sample surface (panel i ) The occurrence of multiple ruptures took place more frequently at lower frequencies, i.e. 0.1–1 Hz
Lastly, creep compliance measurement was carried on a neat LDPE region of the PS/LDPE sample. The working principle of AFM creep experiment was illustrated in Fig. 4a. Initially, the AFM tip was brought into contact with sample surface until the predefined force setpoint was reached. The tip was sthen held onto the sample for a certain time period, during which the force was kept constant. Following that, the tip was retracted. In the hold segment, the AFM recorded the change in Z motion. The change in indentation depth as a function of time (Fig. 4b) could be fitted with Voigt version of SLS model using Eq. (13). A representative creep curve was shown in Fig. 4c. The black curve was the data while the red solid line was the fitting curve. The inset indicated the Voigt version of SLS model, featuring a spring (E 1 ) in series with a spring (E 2 )-dashpot (η ) Voigt element in parallel. The experiment showed that instantaneous elastic modulus E 1 , delayed elastic modulus E 2 , viscosity η , retardation time τ were 22.3 ± 3.5 MPa, 43.3 ± 4.8 MPa, 38.7 ± 5.6 MPa‧s and 0.89 ± 0.22 s, respectively. The data were tabulated in Table 2.

Creep compliance measurement on a neat LDPE region of the PS/LDPE sample. The working principle of AFM creep experiment was illustrated in panel a . Initially, the AFM tip was brought into contact with sample surface till it reached the predefined force setpoint. The tip was then held onto the sample for a certain time period, during which the force was kept constant. Following that, the tip was retracted. In the hold segment, the AFM recorded the change in Z motion (panel b ) The change in indentation depth as a function of time could be fitted with Voigt version of SLS model using Eq. (13). A representative creep curve was shown in panel c . The black curve was the data, while the red solid line was the fitting curve. The inset indicated the Voigt version of SLS model, featuring a spring (E 1 ) in series with a spring (E 2 )-dashpot (η ) Voigt element in parallel
Discussion
In the present study, a comprehensive powerful nanomechanical mapping approach for polymer samples has been developed by incorporating a number of nanoscale AFM based force measurements. The approach allows simultaneous high-resolution topography imaging and quantitative nanomechanical mapping. Local mechanical behavior can be correlated with sample topography. More importantly, the time dependent mechanical response of soft viscoelastic materials has been successfully mapped out. The Hertz model is a widely received contact mechanics model [31], in which the scenario when a rigid probe indents a semi-infinite, isotropic, homogeneous elastic surface is described. However, the Hertz model assumes no surface forces, which is not true for soft materials. To overcome this shortcoming, the Johnson–Kendall–Roberts (JKR) model and the DMT model have been developed. Given the setup in this study, the DMT model can be implemented as there are high elastic modulus, low adhesion, and small tip radius involved where long rang surface forces exist. The force setpoint at 5 nN has been empirically obtained, and justified to be the optimum value in terms of getting meaningful indentation depth while the DMT model still holds. Low force load also gives rise to sample deformation in elastic regime not plastic regime. In addition, sharp tip enables high resolution sample topography imaging in PFQNM measurements, which is an attractive advantage when correlates sample topography with mechanical properties.
Tip radius estimation is not trivial in quantitative mechanical measurements. Many researches estimate the tip radius by backward calculation using a sample with known modulus [29, 32]. This work adopts a different reconstruction strategy that does not require such a sample. It has been documented that using blunt tips tend to yield tighter modulus numbers and that sharp tips may overestimate the modulus. However, sharp tips preserve high spatial resolution, an advantage not possessed by other techniques. Polymer fibrils are clearly seen (see a 0.5 µm × 0.5 µm scan in Fig. 3). Sharp tips, even under small load, can penetrate into compliant samples due to large stress, resulting in large indentation. Therefore, it could compromise the validity of the DMT model. That is not the case in this study as the applied force is controlled in a precise and sensitive manner, evidenced by the resulted indentation depth and the effective tip radius in the same order of magnitude (22.5 ± 3.2 nm, n =3). Surface roughness (\(R_{{\text{q}}}\)) of the LDPE height image is 2.58 ± 0.35 nm, indicating the surface is flat and surface roughness should not be treated as a confounding factor to quantitative measurements [33]. In addition, the linearized DMT model fit does not require determination of the contact point that could otherwise lead to major errors in the final calculated modulus [34]. Taken together, the current experiment setup fulfills the DMT model.
To evaluate the effectiveness of PFQNM, the PS/LDPE sample has been scanned at large size. The survey scan shows LDPE has higher adhesion than PS (Fig. 2b), suggesting LDPE is stickier. AFM tip indents deeper in LDPE than in PS (Fig. 2c), indicating LDPE is softer than PE. The determined Young’s moduli for LDPE and PS are about 90 MPa and 2.5 GPa, respectively. The PS region is a little stiff for RTESPA-150 probe to indent, thus the measured modulus tends to be higher than the nominal value. Both PFQNM and FFV generate high resolution topography and modulus images (c.f. Fig. 3a, b, e, f). It is noteworthy that FFV requires reasonable data acquisition time, although it is not as impressive as PFQNM but much faster than traditional force ramp. Energy dissipation is an observable that explicitly demonstrates how much energy loss per tapping cycle (Fig. 3h). The more viscoelastic of the material, the more energy loss it incurs. The energy dissipation map demonstrates that AFM probe loses more energy on LDPE than on PS, implying LDPE is viscoelastic and response time plays an important role. The relaxation function for the power-law rheology model is described as \(\varphi =E_{{\text{a}}} \left( {\frac{t}{{t_{0} }}} \right)^{{ - \gamma }}\) [35], where E a is the apparent Young’s modulus at time t 0 , is the power-law exponent γ e t 0 is a timescale factor which is set to 1 s. The dimensionless number γ characterizes the viscoelastic behavior of the material, with γ = 0 for purely elastic solid and γ = 1 for purely Newtonian fluid [36]. Current study indicates LDPE has more elastic behavior than viscous counterpart. Figure 3i exhibits an interesting finding in FV experiments that a force curve harboring two rupture events. The multiple rupture events occur more frequently in lower frequencies, i.e. 0.1–1 Hz. It is conceivable that with lower frequency, the tip dwells longer on sample surface that results in forming stronger bonds. When tip is retracted, the slower motion of tip would break the bonds at lower speed, providing the chance of being captured by AFM [37]. On the contrary, when performed at higher frequencies, weaker bonds are formed due to short dwell period and AFM is not capable of capturing transition rupture events due to poor temporal resolution. Another plausible explanation is that the combination of force exerted and longer interaction time on sample induces polymer chain conformation change, as reported previously that force induces rotation of carbon–carbon double bonds [38]. With piconewton force sensitivity and sub-nanometer distance accuracy, F-D curves not only reveal the strength of the formed bonds but also shed insights into the elastic properties and conformational changes. It was documented that at low forces (< 100 pN) and large forces (> 300 pN) the mechanical behavior of polymer chains is majorly affected by its entropic elasticity and enthalpic elasticity, respectively [39].
To further investigate the time dependent mechanical response of LDPE, creep compliance experiment has been carried out on the premise that the closed-loop scanner has been drift calibrated. Experimental data show that instantaneous elastic modulus E 1 , delayed elastic modulus E 2 , viscosity η , retardation time τ are 22.3 ± 3.5 MPa, 43.3 ± 4.8 MPa, 38.7 ± 5.6 MPa s and 0.89 ± 0.22 s, respectively (Table 2). This set of values for creep behavior is close to those reported for polyurethane nanocomposites [40] and syndiotactic polypropylene [41] and higher than those for bacterial biofilm [19] and live cells [36, 42]. While large AFM indenter platform measures elastic modulus of soft samples in an ensemble way, it does not enjoy high spatial resolution of elasticity. Such local mechanical properties are critical for some specimen. For instance, cell membranes are composed of various substructures like cytoskeleton, filament network and microvilli, each has varying elasticities [30]. A recent paper has studied the elastic modulus of fibroblast cells in the frequency range of 0.3–250 Hz [43]. The authors have discovered raised apparent Young’s modulus when ramp frequency increased, consistent with the observations of current study. The approaches reported here are as reliable as any other nanomechanical techniques provided the force-indentation has been prudently designed and the data analysis has been carefully executed. The PFQNM measurement is particularly helpful due to its localized correlation of sample topography with mechanical behavior. It is advantageous in terms of local non-destructive probing of mechanical properties over traditional instrumented indentation, where large probe tip is used and large destructive force is applied. Furthermore, the AFM creep experiment provides dynamic mechanical behavior at nanoscale. The methodology presented here offers multiparametric, multifunctional probing of mechanical measurement along with exceptional high spatial resolution. It has been successfully exploited for quantitative nanomechanical mapping of soft polymers such as LDPE, and can potentially be extended to complex biological systems [43,44,45].
Conclusões
Utilizing state-of-the-art PFQNM as well as with FV and FFV, the power-low rheology of a LDPE sample has been evaluated in a time-dependent fashion. Specifically, rigorous calibrations are done. Force data are fitted with a linearized DMT contact mechanics model considering surface adhesion force. Elastic Young’s modulus was measured at frequencies spanned four orders of magnitude. Increased Young’s modulus was discovered with increasing acquisition frequency. The Young’s modulus is 11.7 ± 5.2 MPa at 0.1 Hz but increases to 89.6 ± 17.3 MPa at 2 kHz. The acquisition frequency dependent modulus change could be described by a power function \(E =15.31 \times f^{{0.23}}\) (\(R^{2}\) = 0.96). Energy dissipation in the range of 0.125–2 kHz further supports this observation. Furthermore, creep compliance experiment shows that instantaneous elastic modulus E 1 , delayed elastic modulus E 2 , viscosity η , retardation time τ are 22.3 ± 3.5 MPa, 43.3 ± 4.8 MPa, 38.7 ± 5.6 MPa‧s and 0.89 ± 0.22 s, respectively. The multiparametric, multifunctional local probing of mechanical measurement along with exceptional high spatial resolution imaging open new opportunities for quantitative nanomechanical mapping of soft polymers, and can potentially be extended to biological systems.
Disponibilidade de dados e materiais
The datasets used or analyzed during the current study are available from the corresponding author on reasonable request.
Abreviações
- AFM:
-
Força atômica microscópica
- DMT:
-
Derjaguin–Muller–Toporov
- FFV:
-
Fast force volume
- FV:
-
Force volume
- JKR:
-
Johnson–Kendall–Roberts
- LDPE:
-
Low density polyolefin
- PFQNM:
-
PeakForce quantitative nanomechanical mapping
- PFT:
-
PeakForce tapping
- PS:
-
Poliestireno
Um circuito de detecção precoce para aumento de resistência de contato de preenchimento resistivo de acesso aleatório à matriz de memória
Detector de ampla faixa de efeito de carregamento induzido por plasma para processos CMOS BEOL avançados
Nanomateriais
- Mapeamento do fluxo de temperatura doméstico com sensores baratos
- Fabricação de aditivos com compostos na indústria aeroespacial e defesa
- Composto mecânico de LiNi0.8Co0.15Al0.05O2 / nanotubos de carbono com desempenho eletroquímico aprimorado para baterias de íon-lítio
- Características interfaciais, elétricas e de alinhamento de banda de pilhas de HfO2 / Ge com camada intermediária de SiO2 formada in situ por deposição de camada atômica aprimorada com plasma
- Fabricação de fossos em nanoescala com alto rendimento em filme fino de polímero usando litografia de aragem dinâmica baseada em ponta de AFM
- Evolução da área de contato com carga normal para superfícies rugosas:de escalas atômicas a macroscópicas
- Estudo da Força de Adesão e Transição de Vidro de Filmes de Poliestireno Fino por Microscopia de Força Atômica
- Identificação de macromoléculas características de genótipos de Escherichia coli por microscópio de força atômica Mapeamento mecânico em nanoescala
- Sensor tátil macio com características comparáveis à pele para robôs
- Fusos de alta velocidade com grande força de torque