


Influência da rigidez elástica e adesão da superfície no salto de nanopartículas
Resumo
As colisões granulares são caracterizadas por uma velocidade limite, separando o regime de baixa velocidade do grão aderindo do regime de alta velocidade do grão saltando:a velocidade de salto, v b . Este parâmetro é particularmente importante para nanograins e tem aplicações, por exemplo, em astrofísica, onde entra na descrição da agregação de poeira colisional. As estimativas analíticas são baseadas na teoria macroscópica de Johnson-Kendall-Roberts (JKR), que prevê a dependência de v b no raio, rigidez elástica e adesão superficial dos grãos. Aqui, realizamos simulações atomísticas com potenciais de modelo que nos permitem testar essas dependências para colisões de nanograins. Nossos resultados não apenas mostram que o JKR descreve a dependência dos parâmetros dos materiais qualitativamente bem, mas também apontam para desvios quantitativos consideráveis. Estes são os mais pronunciados para adesão pequena, onde a rigidez elástica não influencia o valor da velocidade de salto.
Histórico
Indiscutivelmente, o processo mais básico da mecânica granular é a colisão de dois grãos. Em grandes velocidades de grão, os grãos se separam novamente após a colisão, e o resultado da colisão pode ser caracterizado pela mecânica clássica das colisões inelásticas. Em velocidades de grão pequenas, no entanto, os grãos grudam. O limite entre colisões de salto e aderência [1] pode ser denominado velocidade de salto, v b . Este parâmetro é particularmente importante para nanograins e tem aplicações, por exemplo, em astrofísica, onde entra na descrição da agregação de poeira colisional [2, 3].
A mecânica de contato macroscópica foi usada para derivar uma previsão para v b . É baseado na teoria de Johnson-Kendall-Roberts (JKR) [4], que descreve a colisão de duas esferas adesivas usando a rigidez elástica e a adesão superficial como dados básicos da física. Quantitativamente, essas quantidades são descritas pelo módulo de indentação, E ind = E / (1− ν 2 ), onde E é o módulo de Young e ν o número de Poisson, e pela energia superficial γ . Com o raio da esfera R e a densidade de massa ρ , a velocidade de salto de duas esferas idênticas lê [1, 5, 6]
$$ {v_ {b}} =\ left (\ frac {C} {\ rho} \ right) ^ {1/2} \ left (\ frac {\ gamma ^ {5}} {E _ {\ text {ind }} ^ {2} R ^ {5}} \ right) ^ {1/6}. $$ (1)
O valor da constante C depende fortemente das suposições de dissipação de energia durante a colisão e foi discutido para assumir valores entre 0,3 e 60 [1, 7].
A validade desta previsão foi estudada predominantemente com respeito à sua dependência de tamanho [1, 5–8]. Com a diminuição do tamanho do grão, as forças adesivas se tornam mais importantes e a velocidade de salto aumenta. De fato, experimentos em nanograins (grãos de Ag e NaCl) [9] encontram v b estar na faixa de 1 m / s para tamanhos de grãos de alguns 10 nm, mas aumentar acentuadamente para grãos menores. Simulações atomísticas baseadas em dinâmica molecular (MD) confirmaram o R previsto −5/6 dependência para colisões entre grãos de sílica amorfa de tamanhos R =15-25 nm [7].
Até agora, a dependência prevista de v b nos parâmetros de materiais E ind e γ não foi testado em detalhes. Isso não é feito facilmente no experimento, uma vez que materiais diferentes geralmente diferem em ambas as quantidades. No entanto, usando MD, podemos construir materiais de modelo, que têm propriedades idênticas, mas diferem apenas em um aspecto, seja E ind ou γ . Neste artigo, escolhemos um modelo para Cu [10], mas variamos os parâmetros dos materiais generosamente em até uma ordem de magnitude dos valores reais. Uma vez que não encontramos saltos para nanopartículas amorfas neste sistema, nos concentramos em grãos cristalinos (fcc).
Métodos / Experimental
Usamos o potencial Morse,
$$ U (r) =D \ left [e ^ {- 2 \ alpha (r-r_ {0})} - 2 e ^ {- \ alpha (r-r_ {0})} \ right], $$ (2)
para descrever a interação entre dois átomos de distância r . Os três parâmetros Morse D , α , e r 0 são determinados para descrever a constante de rede a , o módulo de massa B , e a energia coesiva E coh de um sólido FCC a granel.
Para definição, fixamos a constante de rede em a =3,615 Å (apropriado para Cu) neste estudo e também adotar a massa atômica de Cu, a fim de manter a densidade de massa ρ na Eq. (1) fixo. O potencial é cortado em r c =2,5 a ; assim, 12 camadas vizinhas, incluindo um total de 248 átomos, interagem com cada átomo. Um número de 100 potenciais são avaliados para B no intervalo de 403 a 1008 GPa e E coh na faixa de 0,35 a 3,54 eV. Observe que os módulos bulk estudados aqui são maiores e as energias coesivas são menores do que os valores do Cu real ( B =134,4 GPa, E coh =3,54 eV [11]), pois para os valores reais não observamos nenhum salto.
Nós determinamos o módulo de indentação E ind para tensão uniaxial na direção (100) do módulo de Young e o número de Poisson nesta direção ([12], p. 32). A Figura 1a mostra a dependência de E ind em B . Vemos que essas quantidades obedecem a uma relação linear; em módulo de bulk constante, uma diminuição da energia coesiva permite E ind aumentar.
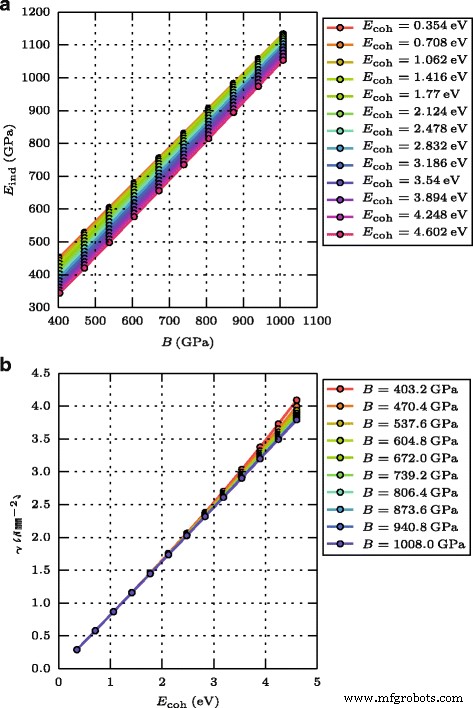
Parâmetros de materiais. Dependência de a o módulo de recuo E ind no módulo de massa B e de b a energia da superfície γ na energia coesiva E coh
A energia de superfície de (100) facetas é calculada a partir da diferença de energia de um cristal em massa e um cristal com uma superfície aberta (100), dividindo-se pela área da superfície aberta [13]. A Figura 1 b mostra que γ é aproximadamente proporcional a E coh ; desvios são visíveis apenas para rigidez menor e materiais fortemente unidos.
Construímos grãos cortando uma esfera com raio R =9 a =33 Å fora da rede fcc, contendo cerca de 12.000 átomos. Devido à sua construção, apresentam uma superfície facetada. Eles estão relaxados para equilibrar suas superfícies; leve relaxamento da superfície, mas nenhuma reconstrução da superfície foi observada. As colisões são iniciadas duplicando os grãos e atirando-os uns contra os outros com uma velocidade relativa v . Apenas colisões centrais são consideradas, onde as duas facetas opostas (100) colidem frontalmente, ver Fig. 2.
Configuração inicial da colisão
Para determinar a velocidade de salto, realizamos colisões com várias velocidades. O algoritmo usado aqui é baseado em um esquema de bissecção simples. Verificamos que as colisões com uma velocidade de 250 m / s estão saltando para todos os sistemas de colisão estudados aqui, enquanto na velocidade de fuga, as colisões estão aderindo. Em seguida, as simulações são executadas na média aritmética da menor velocidade de salto conhecida e a mais alta velocidade de aderência conhecida. Este procedimento é repetido até que a diferença entre a maior aderência e a menor velocidade de salto seja inferior a 10% de seu valor médio. v b é tomado como a média aritmética da maior velocidade de aderência e a menor velocidade de salto; esses dois últimos valores também são considerados para indicar o erro de nosso cálculo nos gráficos. As simulações foram realizadas usando o software open-source LAMMPS [14], e o código é essencialmente o mesmo que o usado em nossos estudos anteriores sobre colisões de sílica [7] e partículas de água-gelo [15].
Resultados
A Figura 3 apresenta uma visão geral dos resultados obtidos. Um ajuste geral de power-law é fornecido por
$$ {v_ {b}} \ propto \ gamma ^ {0,588} E _ {\ text {ind}} ^ {- 0,155}. $$ (3)
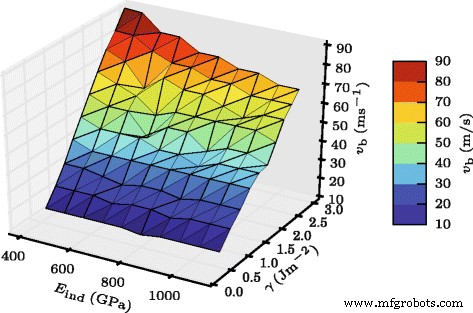
Velocidade de salto. Gráfico tridimensional da dependência da velocidade de salto v b no módulo de indentação E ind e a energia da superfície γ
Assim, as principais características da lei JKR, Eq. (1) —um aumento de v b com adesão e uma diminuição com rigidez elástica - são reproduzidos, mas as dependências são mais fracas do que no caso JKR.
A Figura 4 examina com mais detalhes essas dependências. Uma vez que determinamos as velocidades de salto para materiais com B fixo ou E coh , iremos analisá-los por esses valores fixos, mas apresentaremos as dependências em termos de E ind e γ para fazer a conexão com a previsão JKR, Eq. (1). Para energia coesiva constante E coh , v b depende como uma lei de potência da rigidez elástica,
$$ v_ {b} \ propto E _ {\ text {ind}} ^ {- a}, $$ (4)
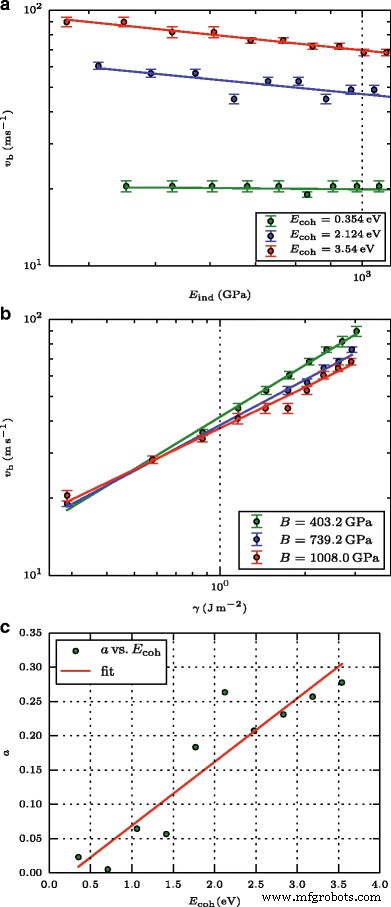
Velocidade de salto. Dependência da velocidade de salto v b no a módulo de recuo E ind e o b energia de superfície γ . As linhas denotam ajustes da lei de potência. c exibe a dependência do expoente de potência, a , Eq. (4), na energia coesiva. A linha denota um ajuste linear para guiar o olho
onde a =0,28 (0,26, 0,02) para E coh =3,54 (2,12, 0,35) eV. Assim, o expoente a =0,33 previsto por JKR é de fato quase recuperado para altas energias de superfície; no entanto, a dependência torna-se mais suave com a diminuição de γ e desaparece completamente em superfícies fracamente adesivas. Observe que, no caso de desaparecimento da energia superficial, todas as colisões devem ser refletidas; isso explica o papel de desaparecimento da rigidez elástica neste caso.
A Figura 4 c mostra os expoentes de potência da dependência de v b ( E ind ), Eq. (4), obtido em nossas simulações. O enredo demonstra claramente o aumento da dependência de E ind com o aumento da energia coesiva e, portanto, a energia da superfície, conforme indicado pela linha vermelha de ajuste linear.
Para rigidez elástica fixa, B , a dependência de v b em γ mostra uma imagem mais simples, consulte a Fig. 4 c. A lei de potência se encaixa, v b ∝ γ - b , forneça valores bastante consistentes de b =0,67 (0,59, 0,53) para B =403 (739, 1008) GPa e, portanto, mostra apenas uma leve dependência de B e, portanto, E ind . Observe, no entanto, que essas dependências são mais suaves do que o valor de b =0,83 previsto pela Eq. (1). Com o aumento da rigidez, os desvios da previsão JKR tornam-se mais fortes. De fato, sabe-se que JKR falha para sistemas muito rígidos [16, 17]. Para tais sistemas, acredita-se que a teoria de Derjaguin-Muller-Toporov (DMT) [18] se aplique melhor; no entanto, nenhuma previsão para a velocidade de salto parece ter surgido dessa teoria.
No geral, as velocidades de salto encontradas aqui estão abaixo de 100 m / s. Enfatizamos que, para valores realistas do potencial de Morse, conforme apropriado para Cu, encontramos aderência ao longo de toda a faixa de velocidades, e nenhum salto. Isso está de acordo com simulações recentes de colisões de esferas de Cu (7–22 nm de diâmetro) com uma superfície de Al realizadas por Pogorelko et al. [19, 20] que encontram aderência a velocidades de 1000 m / s. O motivo pelo qual encontramos saltos em nossas simulações é que usamos potenciais de modelo em que os módulos elásticos são generosamente aumentados e a ligação de superfície é diminuída, com relação aos valores que caracterizam o Cu real.
Acima do limite de rebatimento, as colisões são caracterizadas pelo coeficiente de restituição,
$$ e =| v '| / | v |, $$ (5)
que compara a velocidade relativa após a colisão, v ′ , para aquele antes da colisão, v , e assim mede a inelasticidade da colisão. Para travar colisões, evidentemente, e =0. A teoria JKR sugere uma lei [4-6]
$$ e _ {\ text {JKR}} =\ alpha \ sqrt {1- \ left (\ frac {v_ {b}} {v} \ right) ^ {2}}, $$ (6)
onde introduzimos o fator α levar em consideração a dissipação de energia [7].
A Figura 5 mostra dois casos de dependência da velocidade de e ; achamos que estes são representativos para toda a gama de valores de rigidez e adesão investigados. Em todos esses casos, não há grande dissipação de energia durante a colisão; α é cerca de 0,9. Com energias de superfície suficientemente grandes, Fig. 5 a, e segue muito bem a previsão JKR, Eq. (6). Em pequeno γ , no entanto, Fig. 5b, uma zona de transição mais estreita é vista, em que e muda de 0 para quase 1; esta zona de transição não é bem descrita pela previsão JKR, Eq. (6).
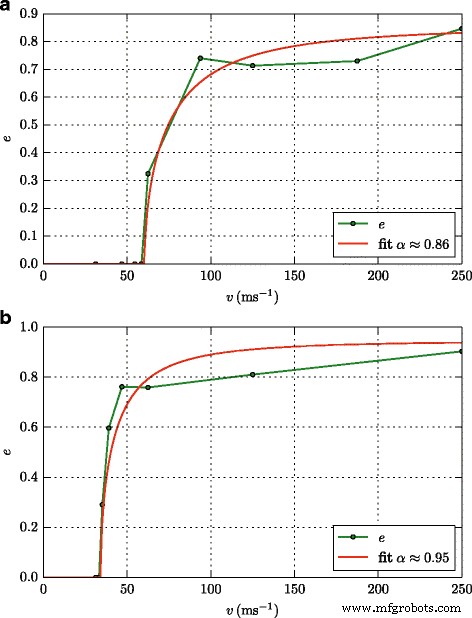
Coeficiente de restituição. Dependência do coeficiente de restituição, e , na velocidade de colisão, v , para um fortemente ( γ =2,32 J / m 2 ) ( a ) e um fraco ( γ =0,89 J / m 2 ) ( b ) superfície adesiva. O módulo de massa é idêntico em ambos os casos, B =940,8. Os símbolos denotam resultados de simulação, enquanto a curva é um ajuste para a previsão JKR, Eq. (6), com α =0,86 ( a ) e 0,95 ( b )
Discussão
No regime de sticking, o coeficiente de restituição fica abaixo de 1 indicando perdas inelásticas de energia durante a colisão. Verificamos que as colisões são puramente elásticas, no sentido de que nenhuma plasticidade permanente foi gerada durante a colisão; a ferramenta de software OVITO [21] foi utilizada para verificar a produção de deslocamentos. Para velocidades mais altas, v > 100 m / s, e esferas complacentes, deslocamentos foram formados temporariamente, mas desapareceram novamente após a colisão. Notamos que durante a colisão de nanoesferas cristalinas de tamanho semelhante interagindo através do potencial genérico de Lennard-Jones, ampla produção de deslocamento pôde ser detectada [22, 23], enquanto zonas de transformação de cisalhamento foram identificadas na colisão de esferas de sílica amorfa [7], ambos sistemas de colisão, portanto, exibem plasticidade. No nosso caso, os altos módulos elásticos impedem o estabelecimento de deformações plásticas; as perdas inelásticas de energia são causadas apenas pela excitação de vibrações nas esferas colididas. Pode-se concluir que a existência de colisões rebatidas está ligada à supressão das perdas inelásticas durante as colisões e, portanto, à supressão da deformação plástica.
O comportamento de e para pequenos γ sublinha nossas descobertas acima para v b que grandes desvios de JKR são exibidos para sistemas fracamente adesivos. Concluímos que para adesão fraca, a velocidade de salto e também o estado do sistema após o salto dependem apenas fracamente de outras características do sistema, como E ind e v .
Conclusões
A previsão da teoria JKR de contatos elásticos adesivos foi testada por simulações MD dedicadas de nanograins usando potenciais de modelo. Descobrimos que as tendências brutas da dependência da velocidade de salto são razoavelmente bem reproduzidas pela teoria JKR ao variar a rigidez do material e a adesão do material em até uma ordem de magnitude. No entanto, encontramos desvios sistemáticos para grãos fracamente adesivos; neste caso, o limite de salto torna-se independente da rigidez do material, e o coeficiente de restituição quase não exibe dependência da velocidade acima de v b . Também para uma adesão mais forte, a dependência da velocidade de salto em γ é sistematicamente menor do que o previsto por JKR.
Esses desvios apontam para uma descrição incompleta das colisões de nanopartículas pela teoria do contato macroscópico. Trabalhos futuros tentarão estender este estudo para grãos cristalinos com outras orientações e com raios maiores, e para grãos amorfos.
Adepto verde na síntese e estabilização de nanopartículas de cobre:atividades catalíticas, antibacterianas, citotoxicidade e antioxidantes
Estimativa do armazenamento de energia do supercapacitor com base em equações diferenciais fracionais
Nanomateriais
- Nanopartículas para terapia do câncer:progresso e desafios atuais
- Preparação e propriedades magnéticas de nanopartículas de espinélio FeMn2O4 dopadas com cobalto
- Síntese fácil e propriedades ópticas de pequenos nanocristais de selênio e nanorods
- Estudo in vitro da influência das nanopartículas de Au nas linhas celulares HT29 e SPEV
- Propriedades de formação e luminescência de Al2O3:Nanocompósitos de SiOC na base de nanopartículas de alumina modificados por feniltrimetoxisilano
- Influência da rigidez elástica e adesão da superfície no salto de nanopartículas
- Avanços recentes em métodos sintéticos e aplicações de nanoestruturas de prata
- Superresfriamento de água controlado por nanopartículas e ultrassom
- Serviços de retificação de superfície:processo e precisão
- O que é retificação de superfície e por que é importante?